帶前置定子導管槳流場數值分析及驗證
2014-07-12 05:58:10毛衛
艦船科學技術 2014年6期
關鍵詞:區域
毛 衛
(海軍裝備部,北京100841)
帶前置定子導管槳流場數值分析及驗證
毛 衛
(海軍裝備部,北京100841)
利用求解雷諾平均NS方程的數值途徑模擬帶前置定子導管螺旋槳周圍的流場,其中網格系統采用卡笛爾的網格和四面體/棱柱體網格相結合的方式,這樣較好地保證了網格的質量和正交性,利用混合面技術處理轉動部件和非轉動部件間邊界條件。通過與LDV的流場測試結果的比較,表明文中采用的數值方法可以較好地模擬復雜組合推進器內的流動過程,為設計性能優良的工程產品服務。
帶定子導管槳;CFD模擬;試驗驗證
0 引言
帶前置定子導管槳是一種具有高效率、低噪聲潛力的新型推進器。這種推進器包含多個組成部分,導管、定子和轉子,各部分的相互作用強烈,且流體粘性對其性能有較大的影響。這些復雜性給其性能分析帶來了一定的難度,用一般螺旋槳的勢流分析方法 (升力面,面元法)難以對其流動特點進行分析而獲得推進器綜合性能評估所必需的流場和水動力數據。隨著計算流體力學(CFD)技術和計算機性能的大幅提高,利用求解雷諾平均NS方程的CFD技術來分析其周圍流動和性能應該將是比較理想的途徑,這方面的工作和應用已經有較多的報道。Kerwin等 (1994)利用粘流和勢流耦合途徑對工作于潛艇后面的組合式推進器的設計和性能預報進行研究,其RANS技術主要應用在計算艇體和附體的粘性尾流場,而推進器的性能分析仍是基于勢流的面元法。Taylor和Kerwin(1998)把上面同樣的技術途徑應用到噴水推進器的性能分析和設計上,粘流和勢流耦合途徑實質上提供了一條解決非均勻進流的途徑,但其并不能考慮到葉片自身的粘流場。Chun等(2002)利用全粘流的RANS方法對包含進口、定子、轉子和導管的噴水系統進行了流動分析。Kim等 (2003)用同樣的途徑分析了2套噴水系統方案的性能。在他們的方法中運用多參考系和混合面的技術來考慮系統中的轉動部件和靜止部件間的相互作用,這一技術現已被廣泛應用到噴水推進系統的性能分析和設計中。噴水推進系統與帶定子的導管螺旋槳最大的不同在于噴水推進系統僅需要考慮到內流場,而帶定子的導管螺旋還包含外流場。Paterson等 (1999)用 RANS求解器CFDSHIP-IOWA分析了工作在潛艇后面的組合推進器的非定常流動,Wang等 (2003)利用TASCFlow分析了組合推進器的流動,從給出的計算結果來看,水動力性能的預報精度還有待提高,然而這些組合式推進器的周圍流動的數值求解為帶定子的導管螺旋槳流場和水動力的數值模擬提供了一條可行的途徑。洪方文等 (2007)利用商用軟件對帶定子的導管螺旋的流動和性能進行了細致分析,給出的水動力性能達到工程應用的精度。
在過去組合式推進器CFD分析展開的驗證工作主要集中在水動力性能方面,而對流場的試驗驗證工作非常少,帶前置定子導管槳周圍的流場是進行推進器綜合性能分析評估的基礎,本文利用Fluent軟件,采用卡笛爾網格和四面體/棱柱體網格相結合的網格系統,利用混合面 (Mixing-Plane)技術處理轉動部件和非轉動部件間邊界條件,對帶前置定子導管槳周圍的流場進行數值模擬,通過與LDV的流場測試結果的比較,表明了文中采用的數值方法可以較好地模擬復雜組合推進器內的流動過程。
1 數值模擬方法
1.1 數值方法
使用Gambit和Fluent軟件進行網格生成和流場分析。
流動控制方程使用三維雷諾平均納維施托克施方程和質量守衡方程,湍流模式使用k-ω SST湍流模型。所有的方程采用旋轉坐標系下絕對變量的形式,對不同的計算域指定不同的旋轉速度,對于不旋轉的區域被看成旋轉速度等于0的旋轉域特例。使用有限體積法來離散微分方程組,對流項使用二階迎風格式進行離散,耗散項使用二階中心格式進行離散。使用Segregated模式求解離散代數方程組,在求解過程中使用Simple方法來修正壓力和速度,使連續性方程得到滿足。整個求解過程不斷迭代進行,以轉子的推力變化作為求解過程的收斂標準。求解過程中利用多重網格技術,以加快收斂速度。
1.2 網格系統
在數值模擬中,計算區域被劃分為3個區域進行網格劃分,分別是轉子區域、定子區域、外圍區域 (見圖1)。轉子區域是包含轉子葉片的區域,定子區域是包含定子葉片的區域,外圍區域是其它的計算區域,包含導管、槳轂以及外圍邊界等。本文求解前方均勻來流的定常流動問題,利用周期性轉子區域和定子區域僅包含一個流道,外圍區域取周向90°區域。
對于外圍區域,其幾何比較簡單,使用結構化網格進行劃分,網格單元數為4.5萬,在周期面上網格單元保持90°旋轉對稱性,網格示意如圖2所示。對于定子區域,由于定子的幾何形狀相對也比較簡單,使用多塊網格進行網格劃分,每塊區域仍采用結構化網格,具體的塊和網格的劃分情況如圖3所示,網格單元數為12.5萬。
對于轉子區域,轉子葉面是復雜的三維空間曲面,另外葉片相對于旋轉軸的角度比較大,如果在轉子區域布置結構化網格,網格的扭曲將比較厲害,網格的質量會變得很差,如果使用非結構化網格,網格單元數會很多,且非結構化網格的數值耗散比較大,對流場細節捕捉較難。在本研究中使用一種更先進的網格形式來劃分轉子區域,這種網格形式被稱為卡笛爾網格。對于這種網格,其網格坐標線都與直角坐標系的坐標線平行,且單元都為正方體。這種網格的最大好處是離散格式的實施非常簡單,且網格的正交性絕對保持,由網格劃分帶來的誤差減到最小,對于需要更高分辨率的流場區域可以通過逐層加密。圖4是一個典型的二維笛卡爾網格系統,其中最大的網格單元為第一層單元,都是尺寸一致的正方形單元。為了擬合邊界的幾何,對含有邊界的單元進行逐層加密,直到滿足邊界足夠的分辨精度。這里對于轉子區域的網格劃分,為了更好地擬合幾何的邊界,在幾何附近布置1~3層的四面體或棱柱體網格,這樣即保持了卡笛爾網格系統的優點又保證了物面邊界的很好的擬合。轉子區域的網格示意圖如圖5所示,網格單元為65萬個。
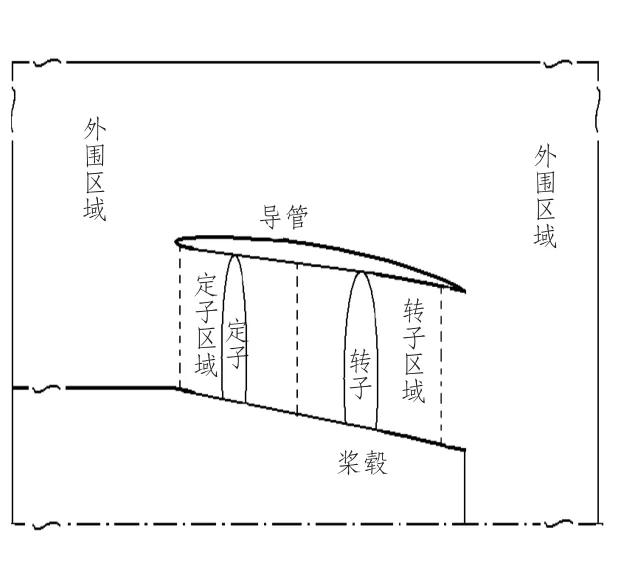
圖1 計算域的劃分Fig.1 Computational domain divided
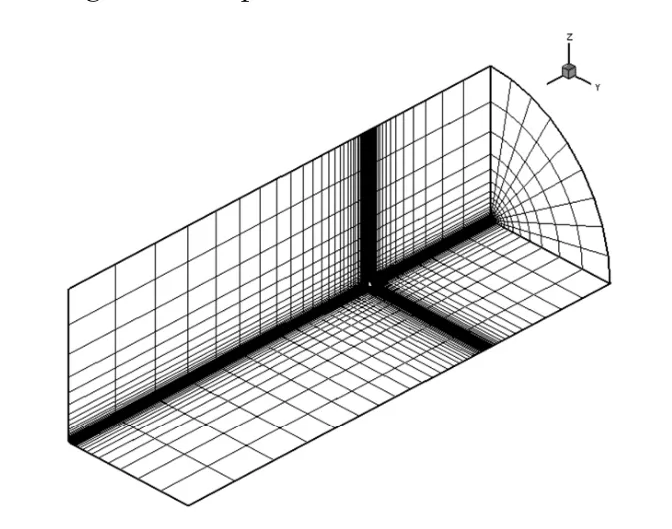
圖2 外圍計算區域網格Fig.2 The grid of peripheral computing region
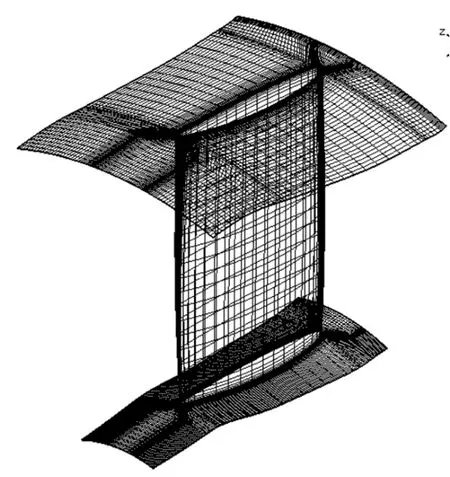
圖3 定子計算區域網格Fig.3 The grid of stator computing region
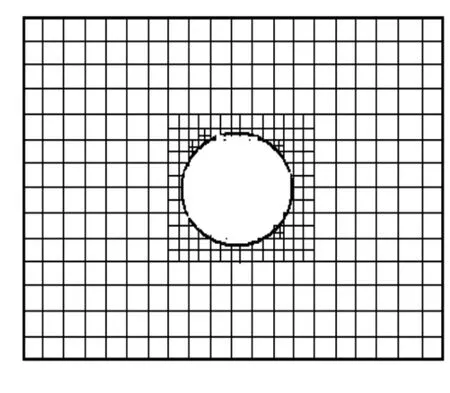
圖4 二維卡笛爾網格系統Fig.4 Two-dimensional cartesian grid system
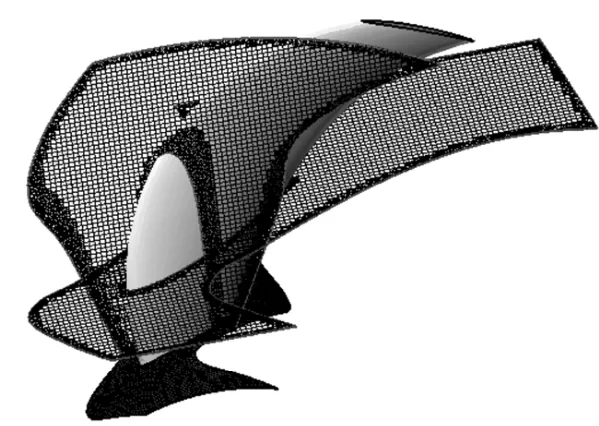
圖5 轉子區域網格Fig.5 The grid of rotor region
1.3 邊界和初始條件
對計算域的邊界設有進口邊界,出口邊界,外部邊界,物面邊界,周期性邊界以及各計算域間交界邊界。在進口邊界處設定速度進口邊界條件,速度指定為無窮遠處來流速度,外部邊界與進口邊界設定同樣的條件,出口邊界設定壓力邊界條件,壓力設定為環境壓力,物面包含轉子、定子、導管及槳轂表面,對這些物面都設定為不滑移速度條件,對周期性邊界根據其所在計算域的具體情況設定為旋轉周期性條件。計算域交接邊界包含外部計算域與定子計算域,定子計算域與轉子計算域,轉子計算域與外部計算域等交接面,在這些面上采用混合面邊界條件。利用均勻來流設定計算的初始條件。
2 試驗驗證
試驗驗證是利用LDV測試系統,在中國船舶科學研究中心的03B空泡水筒中,對模擬分析的帶前置定子導管螺旋槳模型的速度場分布進行測試,并與數值模擬結果進行比較,帶前置定子導管螺旋槳模型工作在前方均勻的來流場中。
2.1 測試系統
試驗采用美國TSI公司生產的二維激光測速儀(LDV),在子午面上測量軸向速度Ux(r,θ),切向速度 Ut(r,θ);在縱向垂直面上測量軸向速度Ux(r,θ)和徑向速度 Ut(r,θ)。流場 LDV測量系統如圖6所示。試驗時用波長為514.5 nm的綠光測量軸向速度和波長為488.0 nm的蘭光測量切向速度和徑向速度,采用750 mm的聚焦鏡,光束夾角為9.6°。激光測速儀的測速范圍為0~100 m/s,測速精度0.2%。測點位置由三維移動坐標架控制,3個方向的定位精度為±0.1 mm。
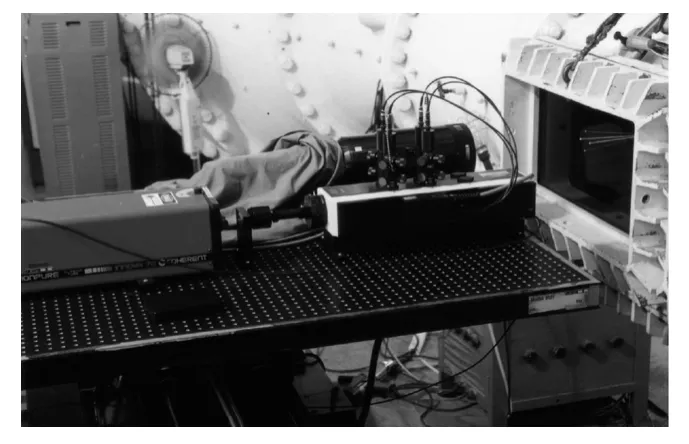
圖6 流場LDV測量系統Fig.6 LDV flow field measurement system
2.2 測點布置
測量參考系統選為直角坐標系,X軸為轉子的旋轉軸,坐標原點在槳轂的末端,正方向指向上游。Y軸垂直向上,Z軸為水平方向,原點都在轉子的旋轉軸上。在導管內部測量了 X/D=0.046,0.106,0.17,0.206,0.386,0.786(見圖7,D是轉子直徑)等6個X位置的Z軸上的軸向和切向速度。試驗測量數據表示的坐標系統為圓柱坐標系統,軸向為X軸,徑向的原點在X軸上,角度的正向為逆時針旋轉方向,軸向速度的正方向選為指向X軸負方向,切向以順時針方向為正。下文中給出的關于速度數據,如果沒有特殊說明,都是以來流速度U無量綱化的結果。
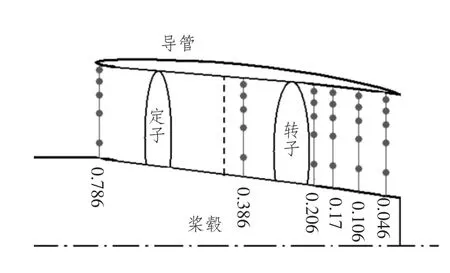
圖7 測量點的位置Fig.7 The position of measurement point
3 結果和分析
計算中帶前置定子導管螺旋槳模型的尺寸和幾何同模型試驗一致。計算狀態對應試驗狀態,進速系數為J=0.65。本文選擇X/D=0.17軸向位置的流場測量結果進行比較。
圖8是X/D=0.17不同半徑處軸向速度和切向速度計算與試驗的比較,其中點劃線是試驗結果,實線是數值模擬結果。從圖上可以看到葉片的尾流中,不論是軸向速度還是切向速度計算結果的變化趨勢都與試驗結果一致。在2個葉片之間從一個葉片的吸力面到另一個葉片的壓力面對應的區域,軸向速度逐漸降低,在靠近壓力面對應區域時軸向速度有一個略微的提高,在跨過葉片對應區域時軸向速度有一個突然的降低,然后急劇上升與葉片吸力面對應區域的高速度相接,切向速度在跨過葉片的尾流時有一個突然的上升。這些速度變化的趨勢,數值模擬結果與測量的試驗數據變化的特征一致。軸向速度從吸力面到壓力面的降低是由于在吸力面處的壓力低于壓力面處,在靠近壓力面時的速度略微提升是由于流動在葉片的尾部必須滿足茹可夫斯基條件,該區域壓力回升。軸向速度的急劇降低和切向速度的急劇上升都是由于在葉片上的不可滑移邊界條件造成的,不可滑移條件要求靠近葉片的流體流動速度與葉片的運動速度一致,這樣軸向速度就向0靠近,切向速度靠近轉子的旋轉速度,體現出比較高的切向速度,流場體現出邊界層特征,得到了較好模擬。
從圖8可看出,在葉根和葉梢部分計算與試驗的結果偏差較大。計算結果速度的變化趨勢同葉片中部的速度變化趨勢基本相同,而試驗結果卻有很大的不同。在葉根部分計算沒能很好地捕捉到葉片與槳轂交接處的流動細節。造成這一結果的原因可能是在這一部位網格密度不夠,不能夠分辨槳轂與葉片的邊界層流動,因為交接部的流動特征很大程度上由兩交接面的邊界層相互作用控制的,由于網格密度的不夠,會使交接部的細微流動特征被數值耗散掉,不能夠傳到下游。在葉梢部,計算對于梢渦流動沒能很好地分辨,這一方面是由于網格的密度不夠,另一方面本計算中沒有考慮葉梢間隙,所以梢渦的下泄機制沒有模擬。計算中不考慮葉片梢部間隙的原因是梢部間隙的空間很小,布置高質量網格的難度較大,如果使用質量不好的網格勉強進行計算,有可能影響整體流場的計算精度。如何精細考慮葉梢間隙流動尚在研究之中。
圖8中,葉片中部流動的計算結果與試驗結果總體上比較吻合,但在流動細節上計算與試驗有一些差別。葉片尾流場中軸向速度虧損處,計算速度虧損的幅度明顯比試驗低,這一原因來自2個方面,一是在葉片表面法向的網格尺寸太大,不能夠分辨葉片的邊界層,另一方面在葉片的尾流區域的網格分辨率不夠,不能分辨流場中的這種劇烈變化,同時還會帶來過高的數值耗散。數值耗散過大在切向速度的變化趨勢中也可以看出。從圖中都可以看到,切向速度峰值的寬度明顯比試驗的寬,且峰值也比試驗的要低。
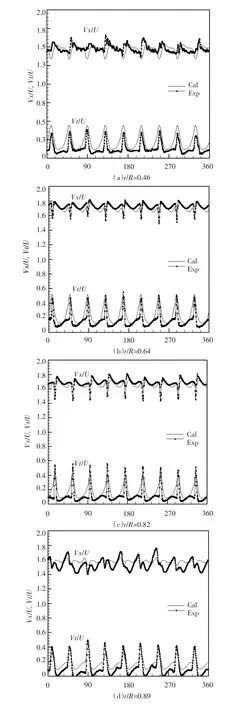
圖8 軸向和切向速度比較 (X/D=0.17)Fig.8 Comparison of axial and tangential velocity(X/D=0.17)
根據提取的各半徑處的速度結果可以計算出軸向速度和切向速度的周向平均值,如表1所示。從表中可以看出軸向速度誤差很小,在2.5%左右。但切向速度的誤差就比較大,基本都達到50%左右,這樣大的誤差是由于切向速度是一個小量,如從絕對誤差來看,與軸向速度的絕對誤差在同一量級,以軸向速度為對比對象,其切向速度的誤差在6%左右,從流場角度看,其誤差可以接受。
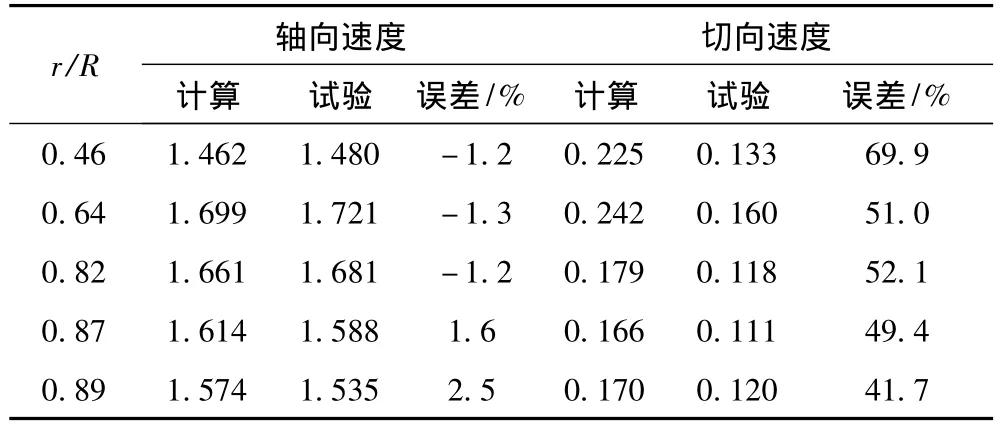
表1 X/D=0.17處各半徑速度周向平均值Tab.1 The mean value of circumferential radius speed of X/D=0.17
4 結語
本文以帶前置定子導管螺旋槳為對象,進行了均勻來流情況下流場的數值模擬,并與試驗進行對比。數值模擬工具采用Fluent軟件,轉子區域的網格使用了卡笛爾網格系統,為了更好地擬合物面同時以四面體和棱柱體網格與它配合。速度測量系統使用的是LDV測試系統,試驗在中國船舶科學研究中心03B空泡水筒中進行的。通過計算與試驗比較分析,得出以下幾點結論:
1)卡笛爾的網格和四面體/棱柱體網格相結合可以較好地布置轉子區域內的網格,能夠較好地保證網格的質量和正交性。但對于在物面附近的網格布置還有進一步改進的必要,以便能夠對邊界層進行更好的捕捉。
2)在尾流場中葉片中部區域數值模擬的速度場與試驗吻合較好,流動的一些典型特征能夠被較好地捕捉到。但一些流動細節與試驗有一定的差別,在網格的分辨率以及邊界層的捕捉上需進一步改善。
3)在尾流場中葉梢和葉根處流動數值模擬結果與試驗相比誤差較大。對于葉片與槳轂交接部流動和葉梢間隙流流動的模擬需進一步研究。
4)軸向速度周向平均的計算結果同試驗結果吻合得相當好,偏差在2.5%左右。由于切向速度是一小量,相對誤差較大,而絕對誤差與軸向速度絕對誤差相當,稍大于軸向速度絕誤差。
通過對比分析,總體上看對帶前置定子導管螺旋槳流場的數值模擬是成功的,不論是在定性上還是在定量上都與試驗吻合得較好,在流動細節的捕捉上,數值技術還有待進一步改進。
[1]BREWTON S,GOWING S,GORSKI J.Performance predictions of a waterjet rotor and rotor/Stator combination using rANS caculations[C].Proc.,26th Symp.on Naval Hydrodynamics,Rome,Italy,2006.
[2]CHUN H H,PARK W G,JUN J G.Experimental and CFD analysis for rotor-stator interaction of a waterjet pump[C].24th Symposium on Naval Hydrodynamics,Japan,2012.
[3]KERWIN J,KEENAN D,BLACK S,DIGGS J A.Coupled viscous/potential flow design menthod for wake-adaped,multi-stage,ducted propulsor using generalized geometry[J].SNAME Transactions,1994,102:23 -56.
[4]KIM K H.Naval applications of waterjet propulsion,the symposium on vehicle propulsion integration[C].NATO RTO Applied Vehicle Technology Panel(AVT),Warsaw,Poland,2003,10.
[5]PATERSON E G,STERN F.Computation of unsteady viscous marine-propulsor blade flows-parts 2:Parametric Study,ASME[J].Journal of Fluids Engineering,1999,121(1):139 -147.
[6]PATERSON E G,KIM J,STERN F.Unsteady RANS simulation of an integrated marine propulsor[C].17th Conference on Numerical Ship Hydrodynamics,Nantes,France,1999.
[7]TALOR T E,KERWIN J E.Waterjet pump design and analysis using a coupled lifting-surface and RANS Procedure[C].International Conference on Waterjet Propulsion,Amsterdam,1998.
[8]WANG T,ZHOU L D,ZHANG X.Numerical Simulation of 3-D viscous flow field around axisymmetric body with integrated ducted propulsion[J].Ship Mechanics,2003,7(2):21 -32.
[9]洪方文,張志榮,黃國富,等.帶前置定子導管槳水動力數值分析[C].船舶力學創刊十周年會議文集,2007.
The flow field numerical analysis and validation for ducted propeller with pre-stator
MAO Wei
(Naval Armament Institute,Beijing 100841,China)
In this paper,the numerical approaches for solving reynolds averaged NS equations to simulate the flow field in front of the stator duct tape around the propeller.Among them,the grid system uses Cartesian grid and tetrahedral/prism mesh combination which ensures a better quality of the mesh and the orthogonal.The mixing-plane technology is used to deal with the boundary conditions between rotating and non -rotating parts.By contrast with the LDV flow field test results,the numerical methods used in this paper can better simulate complex combination of propulsion flow process inside and provide services for designing performance engineering.
ducted propellers with a paddle;CFD simulation;experimental verification
U664.3
A
1672-7649(2014)06-0092-05
10.3404/j.issn.1672-7649.2014.06.018
2014-04-08
毛衛(1961-),高級工程師,主要從事船舶工程方向研究。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15