一種近地軌道衛星的自主作業管理的方法
2014-07-19 12:14:34李巍
山東工業技術 2014年10期
李 巍
(上海衛星工程研究所,上海 200240)
引言
隨著航天事業的發展,發射在軌的衛星數量越來越多,衛星載荷設計越來越復雜。衛星用戶單位需要消耗越來越多的人力資源用于衛星的作業計劃編制。深空探測器由于通信控制回路較長,一般設計為更多依賴自主任務規劃。靜止軌道衛星由于星下點位置較為固定,探測目標也較為固定,作業編排變化少。不同于深空探測器和靜止軌道衛星,近地軌道衛星的作業安排要求使用靈活、探測目標不固定,可自主任務控制又允許人工深度干預。通過近地軌道衛星自主作業管理系統可以實現衛星根據控制策略長期無人值守自動控制衛星載荷工作,在處理緊急任務或任務模式發生變更時又可以通過少量注數實現載荷的靈活控制。
1 近地軌道衛星的常規編制情況
近地軌道衛星的作業計劃編制工作多為人工編排后遙控上注到衛星。作業編排少有創新性,對于氣象衛星、資源普查衛星更是作業編制千篇一律少有變化。對于這些人工生成的作業,地面測控系統每天要協調地面上行資源發送遙控數據到衛星同樣消耗了大量的人力、物力。對于軍事衛星,這種對地面運控系統、測控系統的過分依賴是比較危險的。一旦在戰時地面運控系統、測控系統受到破壞這些衛星由于不能自主生成作業而完全失去作用。
目前的衛星載荷作業編制分為3種情況,都不同程度消耗大量的人力、物力資源進行地面干預。
1) 地面用戶利用運控系統編制每次任務的作業項或者指令序列,通過測控系統上注到衛星。這些作業項或指令序列中包含衛星載荷的開機、關機的指令,載荷運行的各種模式注數等信息。這些作業項或指令序列由衛星進行解釋、執行,完成對載荷的開、關機控制。遙控上注指令序列的方式是每次載荷工作前上注帶時間信息的指令序列。這樣的指令序列少則十幾條,多則近百條指令完成一次載荷的工作控制。由于遙控注數量大,而衛星過境時間有限,就使得載荷控制工作次數較少,載荷利用不飽滿。上注作業項的方式,是地面上注作業項信息,這個作業項中包含開、關機時間、載荷工作模式。上注到衛星后由星載計算機進行解析,把這個作業項分解成一串帶時間信息的開、關機指令序列。多個作業項組成一個作業表,這種上注作業表的方式較上注指令序列的方式,節約了測控信道上注成本,在相同的過境時間內可完成更多的作業上注。上注作業表對衛星載荷進行控制的方式雖然比上注指令序列的方式節約遙控上注成本,但由于每個作業仍然由地面人工干預生成,并未減少人力資源成本。
2) 某些資源普查衛星利用衛星軌道周期性重返的特點,一次上注可支持一個回歸周期內工作的多個作業。衛星反復執行這些作業。一些衛星軌道具有7天、10天等不同的軌道重返周期。用戶可以把一個周期的作業表上注到衛星,由衛星自動重復執行這些作業以簡化衛星的控制。由于衛星軌道不可避免的飄移,地面控制人員要每隔一段時間重新調整這些作業配置,才能保證衛星經過正確的星下點時開機工作。如果要臨時增加一些載荷作業,必須重新上注作業項,如果與周期性工作有沖突還需要重新上注整個周期的作業表。
3) 對數傳站、測控站的自主任務規劃。一些衛星具有遙測數據下傳地面測控站、載荷數據下傳地面數傳站這些任務的自主規劃功能。由于遙測下傳作業、數傳下傳作業較為簡單,數傳下行射頻的開關機時序、工作模式、工作參數配置較為固定。星上存儲地面站類型、地理經度、地理緯度、地心緯度、地心距、最小工作仰角,當衛星經過地面站上方,滿足最小工作仰角時進行測控、數傳的單機開機下傳數據。這種方法只針對測控、數傳等簡單的程控。當涉及到光學載荷、雷達成像載荷、無線電信號偵收載荷等復雜的程控,由于工作參數配置靈活,仍需要人工上注作業進行控制。
以上三種衛星載荷作業編制方法,都需要大量的地面控制人員干預。當有臨時作業安排時,作業的注數量較大、注數生成復雜。本文提出的近地軌道衛星的自主作業管理方法可以彌補這些不足。
2 近地軌道衛星的自主作業管理方法
近地軌道衛星自主作業管理方法是利用作業策略解釋模塊,根據作業模板庫、重點區域庫、作業策略庫的內容在衛星上自動生成作業。由于重點區域根據星下點經緯度劃分,衛星根據GPS軌道數據或者軌道平根自動推演衛星飛臨重點區域的時間。無論衛星軌道的重訪周期性如何都可以自主生成作業。當發生臨時作業時,只需上注新的重點區域和新的作業策略即可,這兩者的遙控注數量都很小且生成簡單,無需復雜的載荷使用背景知識。衛星可通過上注更新作業模板庫、重點區域庫、作業策略庫的方式使衛星載荷的使用靈活,衛星根據這三庫信息完全自主控制衛星載荷工作。根據不同的載荷特點配置不同的作業模板庫,使得本方法具有很好的通用性。
本方法既可以在日常在軌作業管理中節省了地面運控系統、測控系統的大量工作;又可以在突發情況下的靈活變更作業。
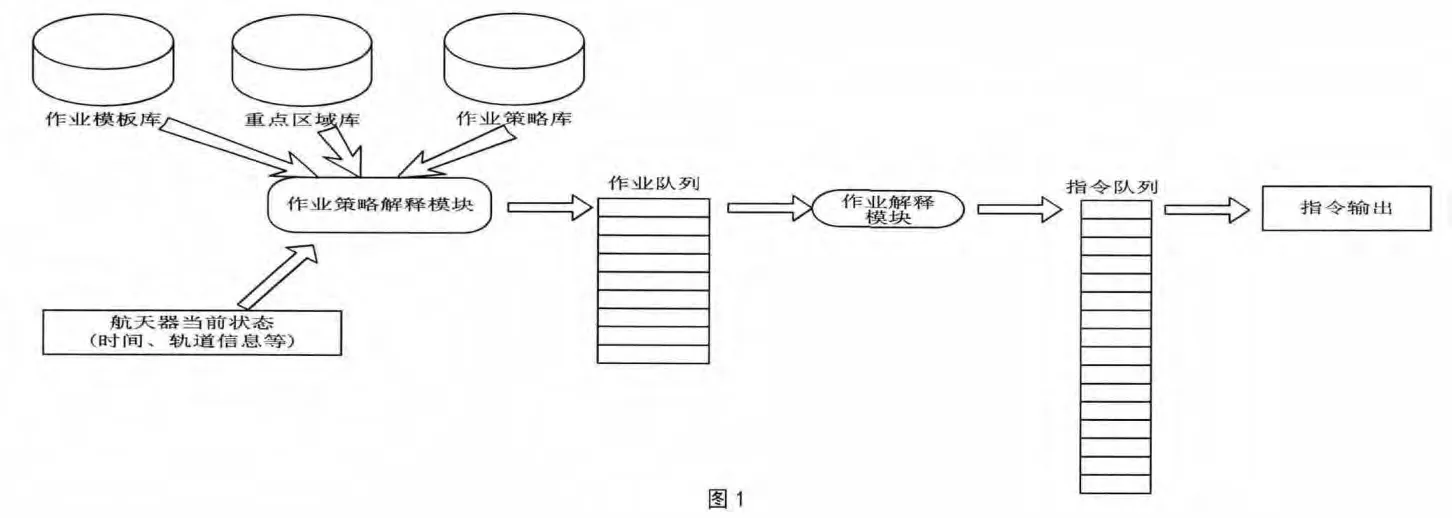
如圖1所示近地軌道衛星自主作業管理系統包括三庫(作業模板庫、重點區域庫、作業策略庫)、兩隊列(作業隊列、指令隊列)、兩模塊(作業策略解釋模塊、作業項解釋模塊)。
作業模板庫用于存儲常用的衛星載荷工作參數配置。其數據結構以模板編號為索引的一維數組,如表1所示。數組中每一個單元為一個作業模板項,數據結構如表2所示。
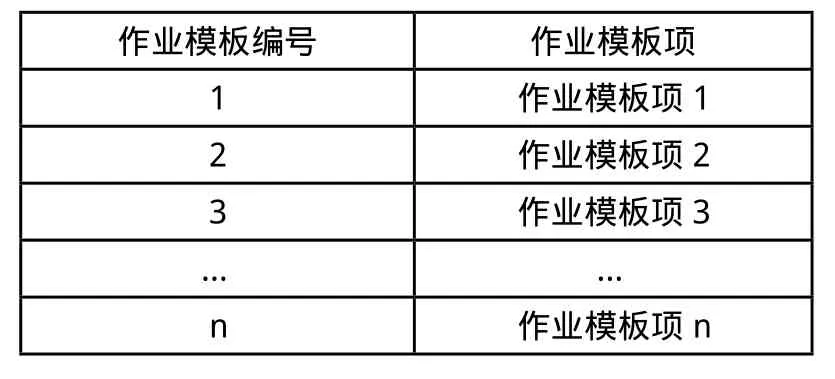
表1 作業模板庫數據結構
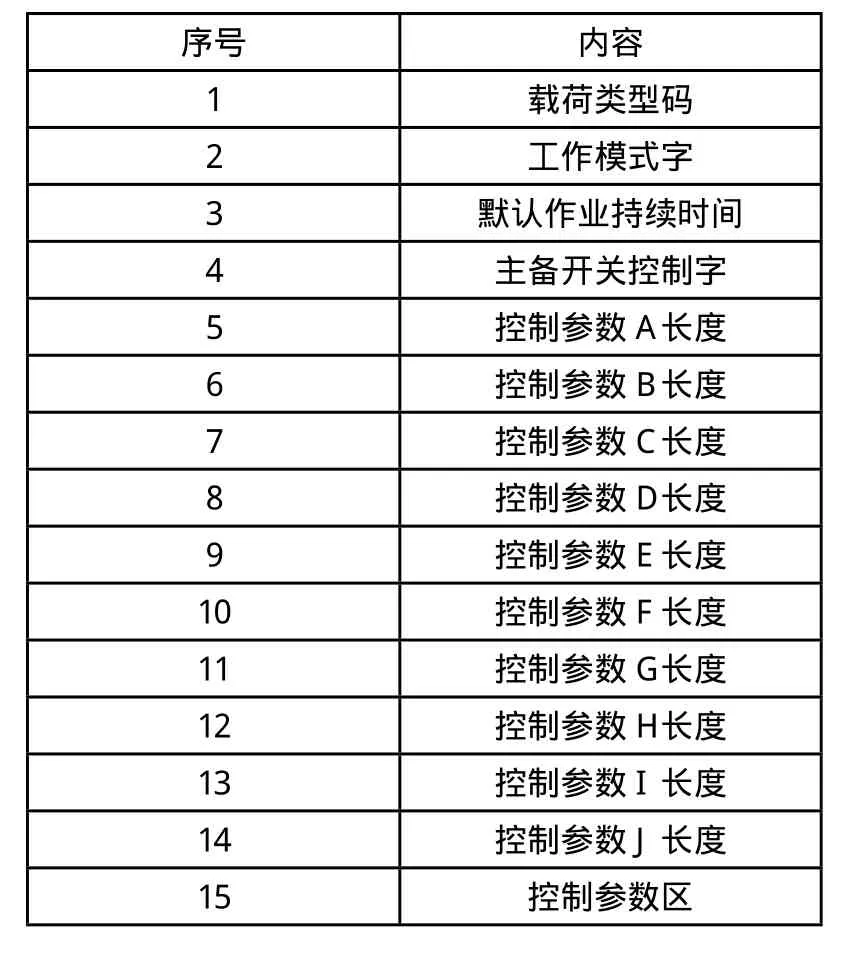
表2 作業模板項數據結構
表2所示的作業模板項為一種通用的作業模板。衛星上不同的載荷作業模板通過作業模板項中的載荷類型碼進行區分。例如某載荷的作業控制參數只有4個,分別長度為8個字節、4個字節、12個字節、30個字節。那么對于這個載荷的作業模板中控制參數A長度為8,控制參數B長度為4,控制參數C長度為12,控制參數D長度為30。控制參數區中為這4種54個字節的數據。作業模板項中的控制參數E到J長度都是0。
重點區域庫用于存儲需要載荷開機工作的星下區域。其數據結構為以重點區域編號為索引的一維數組,如表3所示。數組中每一個單元為一個重點區域項,如表4所示。每一個重點區域項包括經度1、經度2、緯度1、緯度2,4個弧度值。在這2個經度、2個緯度之間的區域為一個重點區域。
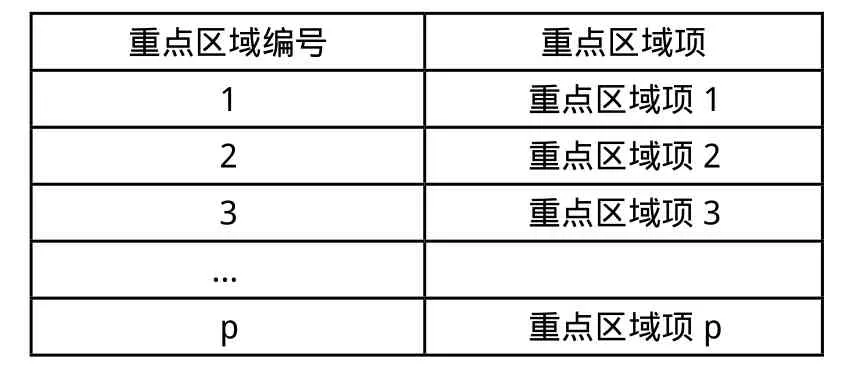
表3 重點區域庫數據結構
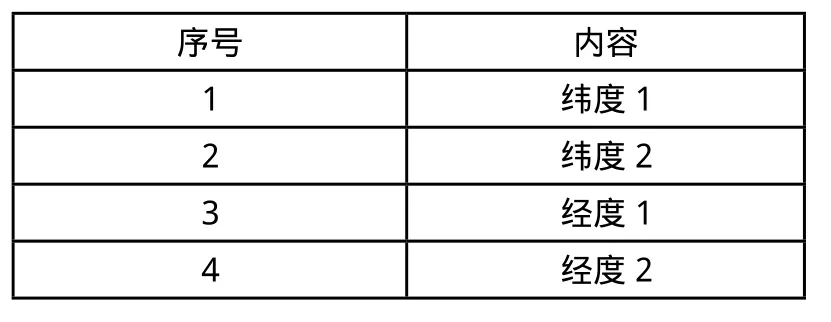
表4 重點區域項數據結構
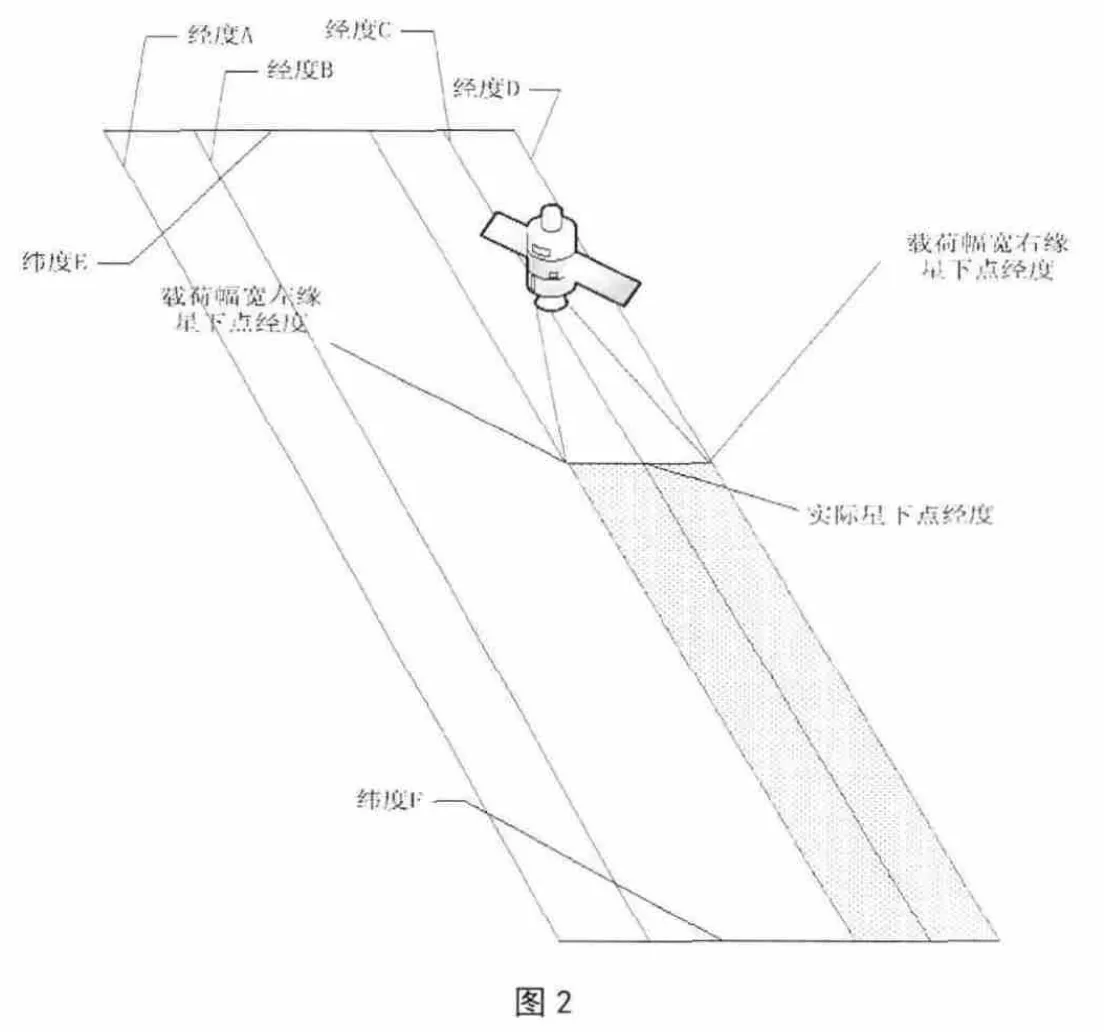
一般衛星載荷對地工作都有一定的幅寬。衛星實際工作區域不同于星下點經過區域。如圖2中所示,當衛星經過星下點區域緯度E、緯度F、經度B、經度C所包圍的范圍時,其載荷對地工作實際掃描的區域為緯度E、緯度F、經度A、經度D所包圍的范圍。重點區域的范圍由實際工作需求、載荷工作特點及載荷工作模式相關,當載荷具有可轉動的探頭或衛星可滾動、俯仰機動時更是如此。
作業策略庫用于存儲作業策略。其結構為作業策略編號為索引的一維數組,如表5所示。數組中每一個單元為一個作業策略項,如表6所示。每一個作業策略項包括本規則是否被激活信息、關聯作業模板項編號、關聯重點區域項編號、工作時間上限、工作時間下限、24小時內執行本作業次數上限、優先級、工作時間排序方式、起始終止時間段限制等信息。

表5 作業策略庫數據結構
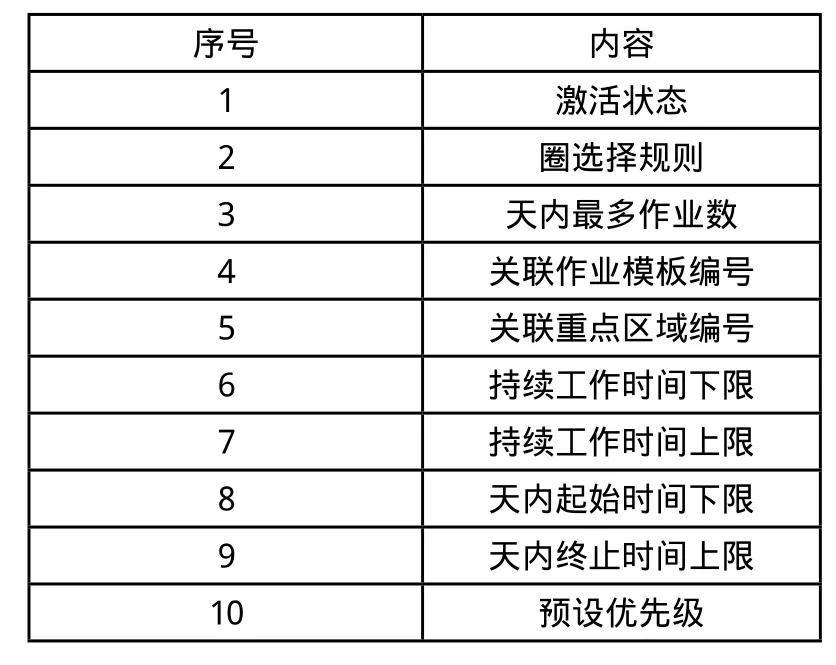
表6 作業策略項數據結構
作業隊列用于存儲作業。該隊列的數據結構為循環隊列。隊列中作業項按執行起始時間從小到大排序。作業項的數據結構如表7所示。 作業策略解釋模塊根據作業策略庫中的規則,查詢作業模板庫、重點區域庫中相關信息生成作業序列插入到作業隊列中。其工作流程如圖3所示。

表7 作業項數據結構
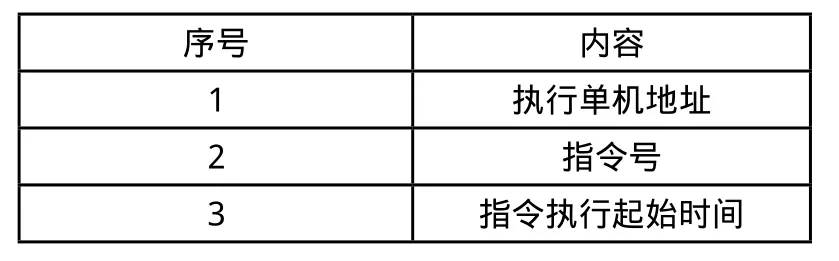
表8 指令項數據結構

圖3 作業策略解釋模塊運行流程
作業解釋模塊查詢作業隊列中執行起始時間小于等于當前衛星系統時間的作業,根據優先級大小刪除資源使用沖突的作業,并把該作業解釋成指令序列插入到指令隊列中。當同一時間段同一載荷有多個作業時執行優先級高的作業。其工作流程如圖4所示。
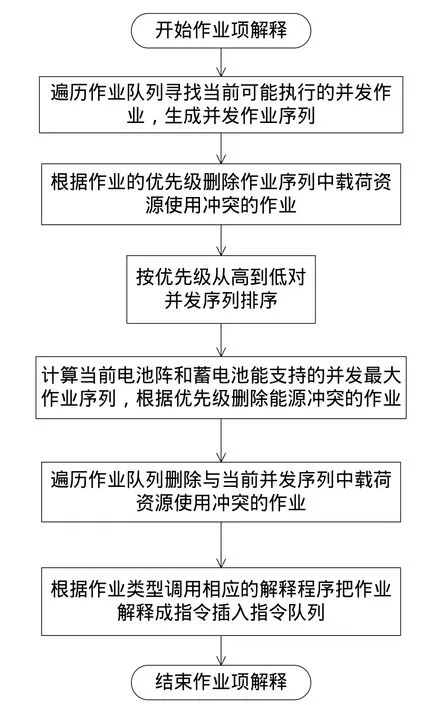
圖4 作業解釋模塊運行流程
3 結論
本文中衛星根據地面預注的作業模板庫、重點區域庫、作業策略庫自動生成作業,控制載荷系統工作。通常情況下,衛星被要求飛臨重點區域時在能源足夠的情況下載荷系統盡量多開機。本方法中的近地軌道衛星自主作業管理系統完全可以滿足這樣的使用要求。當把重點區域設置成幾個可以覆蓋全球的大塊區域,在作業策略中圈選擇規則設置為隨機排序、天內最多作業數設置為1,就可以實現每天進行全球范圍內的一次探索性開機工作。本方法既滿足了常規性作業管理又可以進行探索性作業設置。衛星的絕大部分作業管理工作通過發射前預先設置作業模板庫、重點區域庫、作業策略庫完成。在軌期間也可遙控注數修改這3個庫。衛星間隔固定時間調用作業策略解釋模塊生成控制載荷工作的作業項。對于臨時決策的緊急作業可通過遙控注數直接把設置為高優先級的作業項上注到作業隊列中。這樣可實現對衛星的實時控制。通過使用近地軌道衛星自主作業管理系統可以實現長期無人值守而完成任務,也可以通過人工干預更新這3庫內容而提高近地軌道衛星的使用效能,在突發任務情況更是簡單的注數就可完成任務變更。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
故事大王(2016年7期)2016-09-22 17:30:08
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
機電信息(2014年27期)2014-02-27 15:53:56
兒童故事畫報(2013年3期)2013-06-24 05:40:30
