船舶直線航行控制技術綜述
2014-07-24 01:56:38中國船級社
中國船檢
2014年8期
中國船級社 劉 超
直線航行是船舶運行的重要形式之一,對于降低船舶運營成本,提高船舶航行效率、縮短航行時間具有重要的意義。然而,在實際航行中,直線航行會受到諸多因素的限制。首先,船舶的航跡模型具有較強的非線性特性,傳統閉環控制策略很難處理這一復雜的系統;其次,船舶航行系統為典型的欠驅動系統,即此類系統的控制變量比控制輸入的數量多,進而增大了控制器設計的難度;第三,通常情況下,船舶的運行環境較為惡劣,易受到風浪等因素(如航行中會受到風流壓差角)的影響,從而導致船舶實際航跡偏離期望的航行路線。因此,設計高性能的航行控制器,保證船舶的直線航行、節約船舶運營成本具有十分重要的意義。本文主要介紹船舶航行的非線性模型和航行控制器設計中常用的理論技術,為實際中船舶航行控制器設計提供有價值的參考依據。
船舶直線航行理論模型
實際中,船舶航行示意圖和航跡示意圖分別如圖1和圖2所示。
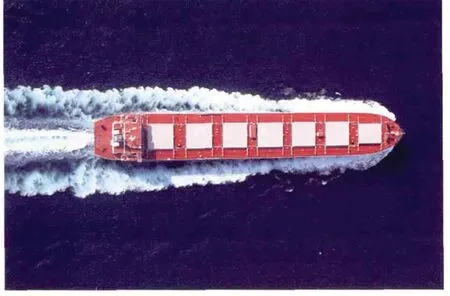
圖1 實習船航行示意圖
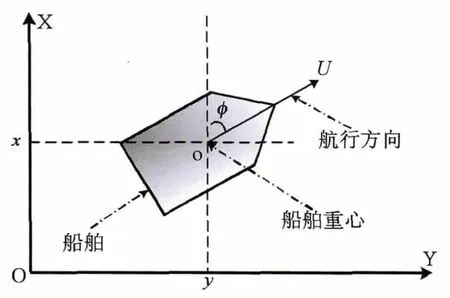
圖2 船舶航跡示意圖
圖1顯示,直線航行是船舶作業的重要形式,在實際應用中具有重要的價值。圖2展示了船舶航行中的控制變量。圖2中,x,y分別為船舶所在海洋坐標系XOY中的橫縱坐標,U為船舶航行的實際速度(同時表示船舶的航行方向);φ表示航向角,假設船舶期望的航行方向為X軸正方向,則φ表示船舶實際航行方向與X軸之間的夾角。
在理論分析中,通常采用Nomoto理論模型來表示船舶航行模型,其具體形式如下
登錄APP查看全文
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2019年7期)2019-04-25 13:16:50
光學精密工程(2016年6期)2016-11-07 09:07:19
電測與儀表(2014年1期)2014-04-04 12:00:32
空間控制技術與應用(2009年3期)2009-01-20 13:47:12