北斗系統雙模網絡實時動態差分法組合定位性能初探
2014-07-25 05:17:30李成鋼羅小軍王長委石曉春劉文建
導航定位學報 2014年2期
李成鋼,羅小軍,王長委,石曉春,劉文建
(1.廣東省國土資源測繪院,廣州 510500;2.西南交通大學,成都 600031;3.華南農業大學,廣州 510061)
1 引言
隨著我國北斗衛星導航系統(BeiDou navigation satellite system,BDS)的迅速發展,如何基于北斗系統廣域或區域連續運行參考站系統(continuously operating reference stations,CORS),為中國及周邊大部分地區提供面向行業和大眾應用的實時分米級和厘米級位置服務,成為目前北斗系統研究和應用的熱點。北斗系統多模多頻載波實時動態差分法(real-time kinematic,RTK)技術的相關研究和應用表明,北斗系統具有與全球定位導航系統(global positioning system,GPS)同等級的厘米級實時定位性能,逐步進入成熟應用期[1-2]。但在網絡RTK(Network RTK或 NRTK)領域,由于缺乏北斗系統CORS系統等地面增強基礎設施支持,測繪、國土、水利及重大工程(如高鐵)等厘米級甚至毫米級精確定位領域仍只能采用原有 GPS 虛 擬 參 考 站 (virtual reference station,VRS)等技術[3-4]。因此采用類似于 GPS系統建立北斗系統兼容連續運行參考站系統,基于BDS多模網絡RTK定位服務,開展性能測試,掌握BDS多模網絡RTK組合定位的精度、靈敏度和定位速度等關鍵指標情況,對提高北斗系統高精度實時定位性能顯得極為重要。
本文首先主要提出了一種基于Ntrip的BDS多模網絡RTK組合定位服務的實現方法,通過數據實時分流和并行服務設計,基于惠州市北斗系統CORS示范系統(HZBCORS),實現了雙中心并行模式下的BDS/GPS雙模網絡RTK定位服務。該服務提供了BDS多模網絡RTK定位技術性能測試所需GPS、BDS和BDS/GPS雙模三種網絡RTK服務。開展科學試驗,以GPS為參考目標,對BDS雙模網絡RTK組合定位性能進行定量比對分析,通過均勻分布的11個網絡RTK野外測試樣本對試驗BDS雙模CORS網絡下的網絡RTK定位精度和初始化效率指標進行定量評估。
2 基于Ntrip的BDS多模網絡RTK服務
2.1 總體設計
Ntrip(Networked Transport of RTCM via Internet Protocol)協議是一種基于超文本傳輸協議HTTP/1.1的應用層協議,支持大規模用戶(如數千)并發訪問和數據傳輸,是國際通用的全球衛星導 航 系 統 (global navigation satellite system,GNSS)實時數據互聯網遠程傳輸標準[5]。以廣東省連續運行衛星服務系統為例(如圖1),基于Ntrip的常規CORS網絡RTK服務系統結構包括服務端(Ntrip Server)、播發端(Ntrip Caster)和客戶端(Ntrip Client)三部分,CORS系統內包括RTCM、RTCA、RINEX格式在內的各類實時數據均采用Ntrip架構進行數據傳輸與服務分發設計,流動站用戶通過獲取CORS系統提供的各類服務對應的的資源列表(Source-table),并確保其對應的掛載點(Mount Point)的唯一性,采用本地加載和遠程索取兩種方式,實現網絡RTK定位[6]。
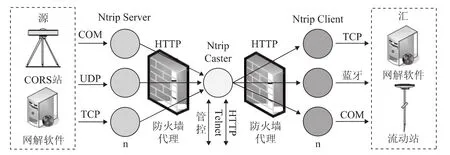
圖1 基于Ntrip的CORS網絡RTK服務系統結構
如圖2,現有CORS系統提供BDS多模網絡RTK服務可以采用以下兩種更新升級模式:
(1)單中心模式
如圖2(a),建立一個Ntrip Server直接實現BDS/GPS雙模參考站系統組合網絡RTK服務,包 括 GPS NRTK,BDS NRTK 及 BDS/GPS NRTK,原有GPS CORS系統網絡RTK服務停止工作。單中心模式是對原有GPS CORS系統軟硬件設施和服務的一種全面替代更新的升級模式,需要將參考站接收機和天線、計算中心處理軟件等均更換為BDS兼容系統[7-9]。隨著BDSCORS系統的不斷完善,單中心模式將成為未來BDS多模網絡RTK服務的主要模式。以下為如圖2(a)某單中心模式GPS NRTK,BDS NRTK及BDS/GPS NRTK三種服務所對應Ntrip資源列表的主要內容設計實例:

(2)雙中心并行模式
在目前大部分CORS系統仍采用GPS Ntrip Server提供網絡RTK服務,而BDS多模網絡RTK定位技術仍未得到充分驗證的情況下,單中心模式顯然難以滿足應用需求。基于此,本文提出了雙中心并行的BDS多模RTK更新升級模式。
如圖2(b),雙中心并行模式是在不影響原有GPS NRTK服務的前提下,通過硬件數據實時分流和并行服務設計,首先提供GPS NRTK backup服務,用于提高原有GPS網絡RTK服務完備性。同時提供BDS NRTK和BDS/GPS NRTK服務,并采用統一的Ntrip Caster,向用戶提供并發式BDS多模網絡RTK服務。
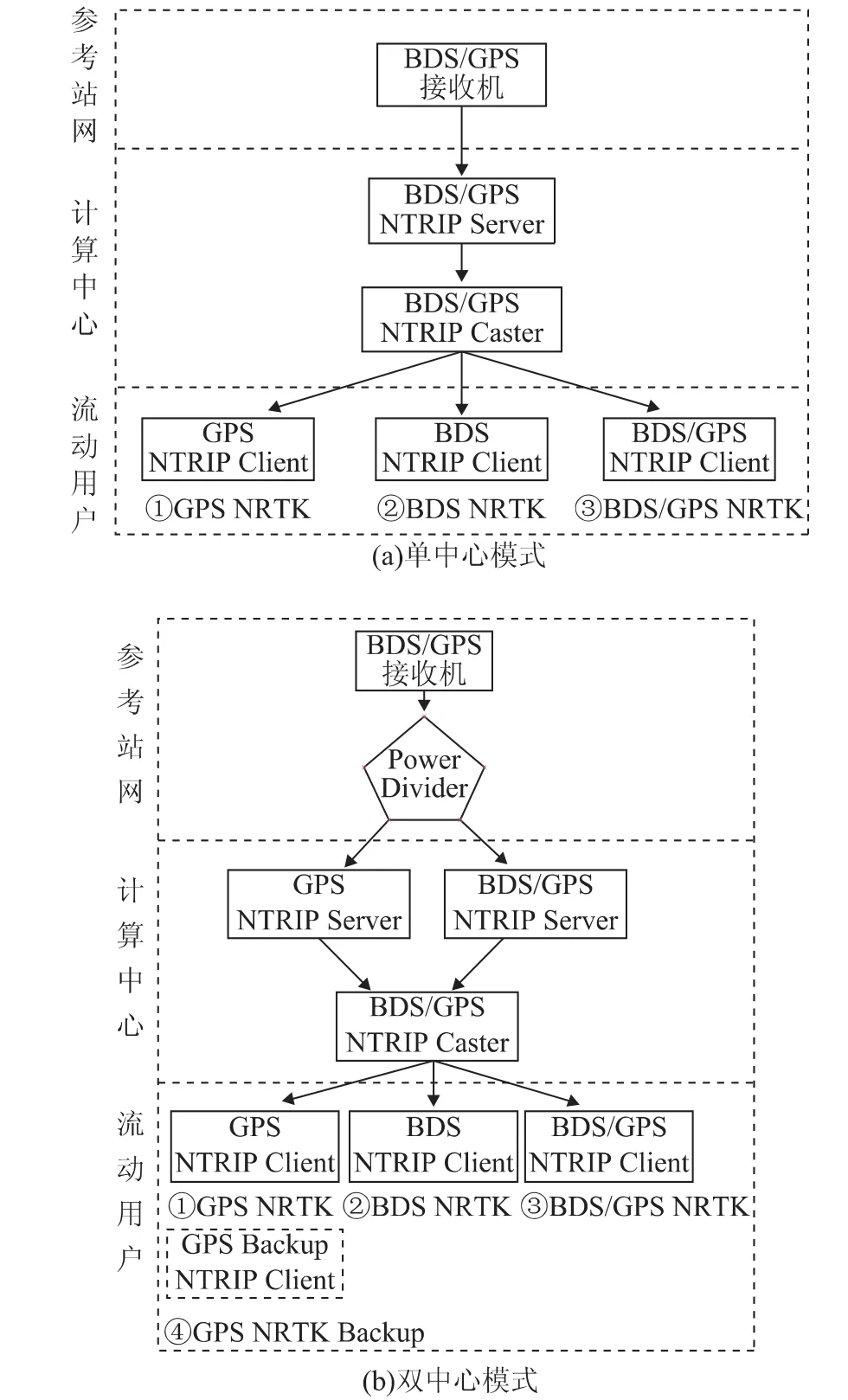
圖2 基于Ntrip的并發式BDS多模網絡RTK服務
采用雙中心模式GPS,BDS及BDS/GPS三種NRTK服務所對應Ntrip資源列表可采用如下設計:
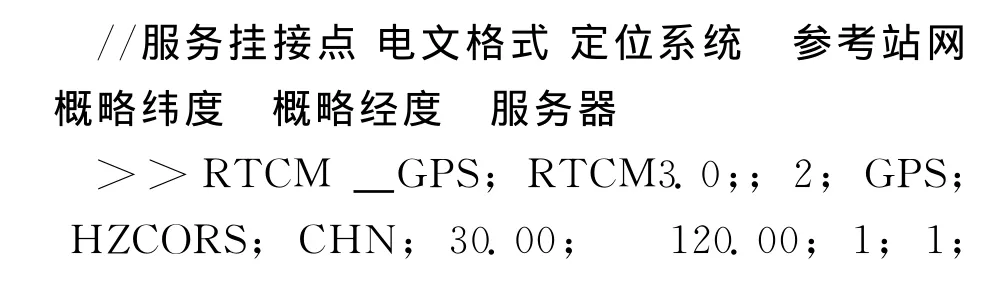
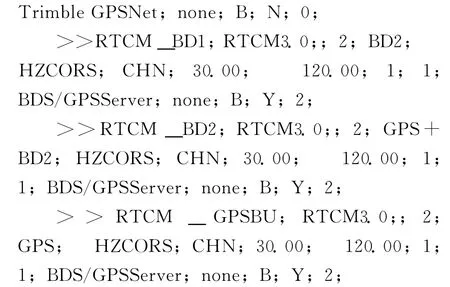
說明:其中RTCM_GPSBU為GPS NRTK的備份服務:
雙中心并行模式設計采用兼容性設計最大限度的利用現有CORS系統的參考站設備、網絡通訊設備和計算中心軟硬件設施,流動站用戶采用標準的網絡RTK定位流程,只需要采用BDS兼容RTK設備,即可獲得具有服務備份的并行式BDS雙模組合網絡RTK服務,具有更強的可行性和系統完備性,是目前BDSCORS系統更新升級,實現BDS雙模組合網絡RTK定位服務較優方案。
2.2 BDS/GPS雙模CORS系統更新升級的實現
如圖2(b)中,采用雙中心模式進行BDS多模CORS系統更新升級時,為滿足兩套NTrip服務并行服務的需要,進行BDS多模天線信號分流工作,實現BDS多模CORS數據實時分流。如圖3,采用功率分配器(簡稱功分器,Power divider),安裝在BDS多模天線后端,利用功分器一路輸入信號能量,兩路或多路信號輸出的能力,將BDS多模天線接收到的信號一分為二,一路進入GPS接收機保證現有GDCORS的正常運行,另一路進入BDS多模接收機,供新的BDS多模NTrip服務器系統使用,且信號分流后的功率損耗不能影響BDS和GPS信號的質量。
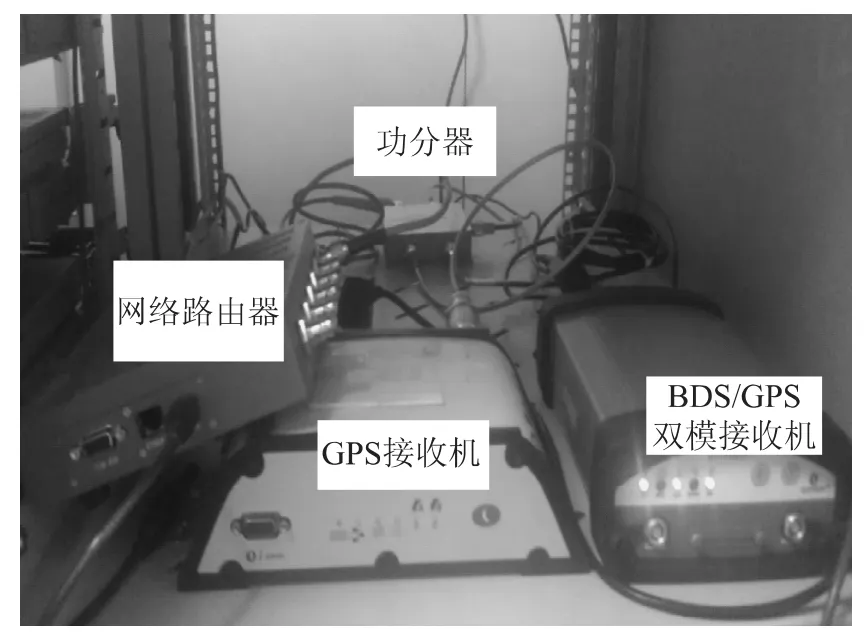
圖3 數據分流實際測試圖
本文對Trimble Zephyr 2天線數據分流前后,三款國產BDS雙模接收機設備的觀測數據可用性進行了測試,測試時長120h,采樣歷元1s,截止高度角10°,結果如表1所示。
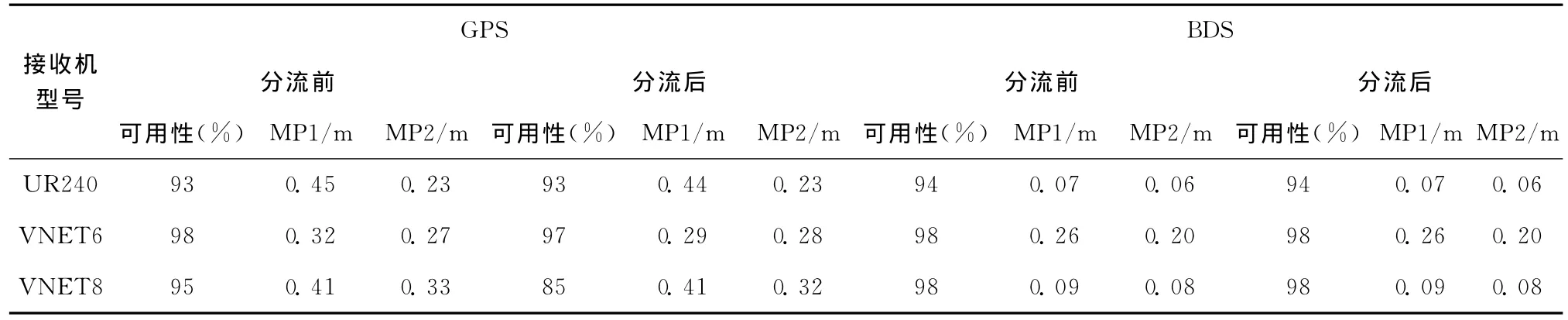
表1 數據分流前后數據質量測試表
測試結果表明,采用數據分流技術后,包括GPS和BDS數據可用性和多路徑指標(MP)均無明顯變化,信號分流對GNSS的信號觀測質量基本不產生影響,但不同型號接收機對BDS兼容天線的接收表現出的指標具有一定差異。
2.3 BDS雙模網絡RTK并行服務的實現
對惠州市GPS連續運行參考站系統(HZCORS)進行了BDS雙模CORS系統更新升級。由于HZCORS系統主要采用Trimble Zephyr Geodetic II天線,兼容BDS信號,因此僅在GDLM、BLGT、HZGT、GTGT基準站等4處未安裝BDS兼容天線的參考站位置更換BDS兼容天線,并采用數據實時分流和雙中心模式建立了BDS雙模CORS試驗網。參考站網參考站分布及聯網運行圖如圖4所示,最長站間距離98km(GDLM-GTGT),平均距離約52km。
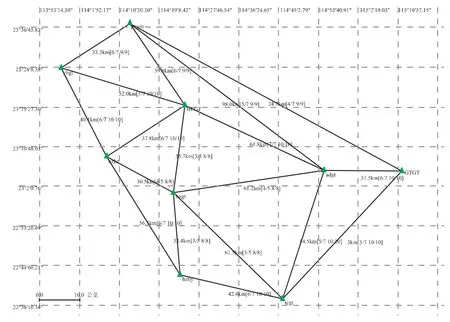
圖4 BDS/GPS雙模CORS試驗示意圖
3 BDS雙模網絡RTK性能測試
3.1 試驗基本情況
如圖5所示,網絡RTK野外性能試驗主要選擇惠州市東部 YHGT(永漢)、GDLM(龍門)、BLGT(博羅)、HZHZ(湖鎮)基站站形成的四邊形區域內,測區范圍約1 200km2。野外網絡RTK測試點11個,測試時間為2013-07-01—02。每個測試點依次采用Trimble NetRS接收機進行GPS RTK、采用司南M300BDS雙模接收機進行BDS RTK和BDS/GPS雙模RTK共三種模式的初始化時間和定位精度測試。初始化時間和精度測試三種模式各測試4個時段。其中精度測試每組120歷元,共480歷元,采樣歷元1s。
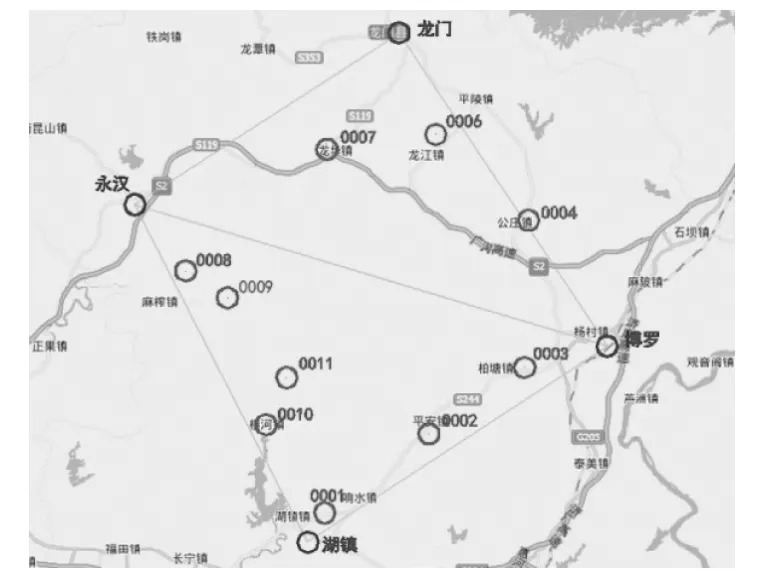
圖5 測試區域及測試點分布
3.2 衛星通視條件分析
已有BDS衛星可視情況仿真研究表明,對于亞太地區的觀測者,BDS衛星星座可視條件比GPS系統更好[4,10]。對網絡RTK野外試驗期間實際GPS、BDS和BDS/GPS雙模三種情況下的衛星通視條件的可見衛星數量和平均幾何精度衰減因子(geometric dilution of precision,GDOP)進行統計,如表2所示。
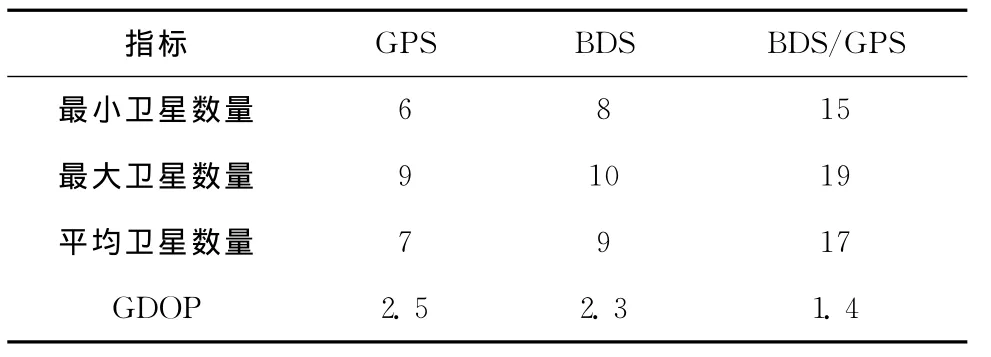
表2 衛星通視條件統計表
如表2,整個試驗階段,BDS衛星數量及GDOP指標均優于GPS,可見衛星數量提高28%,GDOP值下降8%,且隨時段波動小,表現更為穩定。BDS/GPS雙模觀測通視條件遠高于單GPS系統,可見衛星數量提高1.5倍,GDOP值下降44%,觀測條件的大幅提高對動態定位的初始化和精度性能提高會有極大促進作用[9]。
3.3 初始化效率分析
如表3和圖6所示,GPS、BDS和BDS/GPS雙模網絡RTK定位初始化最大時間分別為60s、30s和20s,平均初始化時間分別為30.9s、13.6s和10.4s。BDS和BDS/GPS雙模網絡RTK定位初始化時間與單獨GPS系統RTK定位相比,分別減少56%和66%,初始化效率有顯著提升。
3.4 網絡RTK組合定位精度測試
將各測試點4h的靜態觀測數據和周邊4個CORS站聯合靜態后處理結果作為外符合參考值,將每個測試點4個時段的平均值作為定位精度測試值,各測試點網絡RTK組合定位精度結果及均值(Mean)、標準差(Std)、最大偏差(Max)等指標如表4所示。
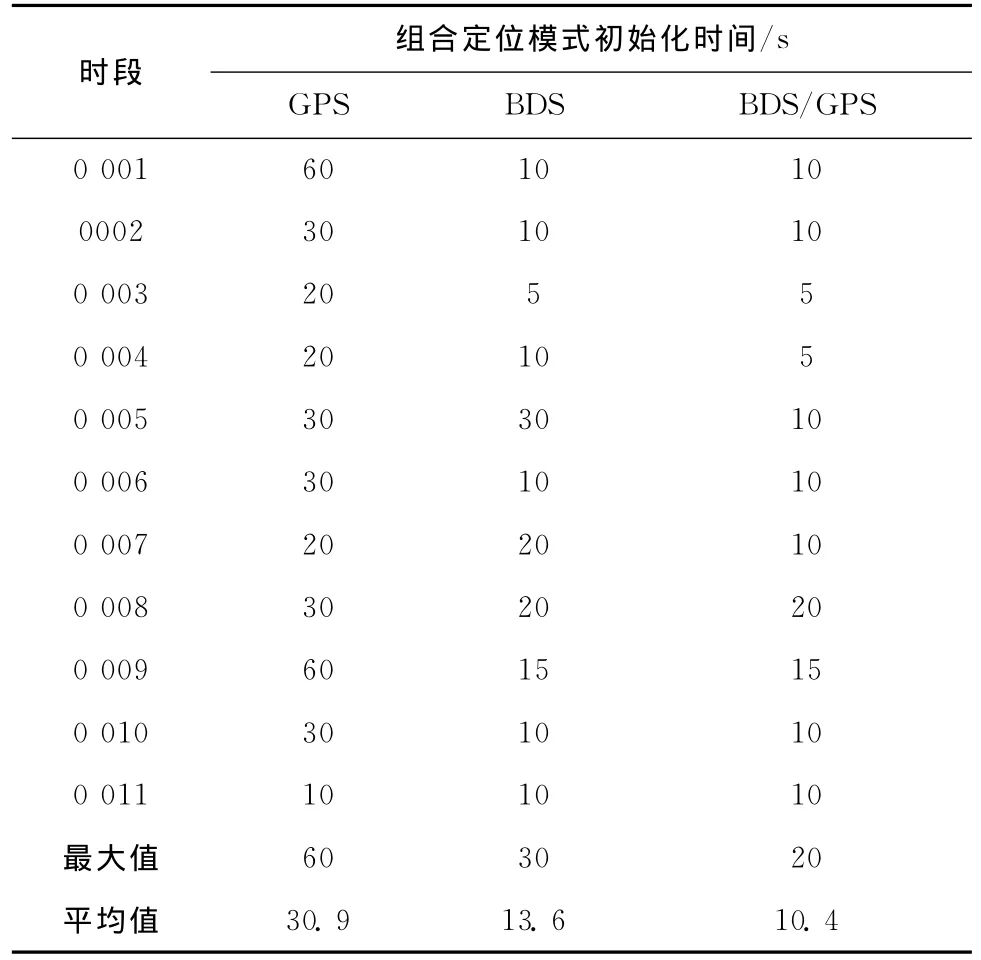
表3 BDS雙模網絡RTK組合定位初始化時間
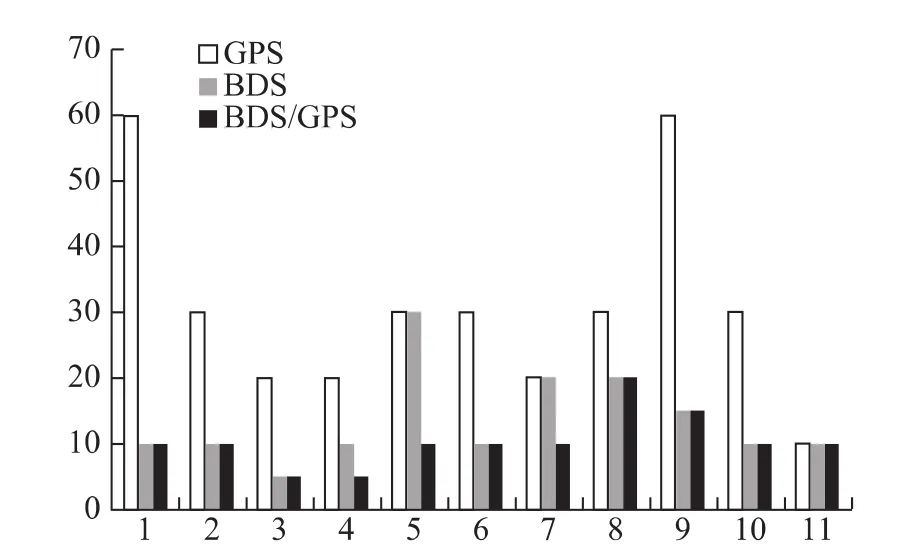
圖6 網絡RTK定位組合定位模式初始化時間差異柱狀圖/s
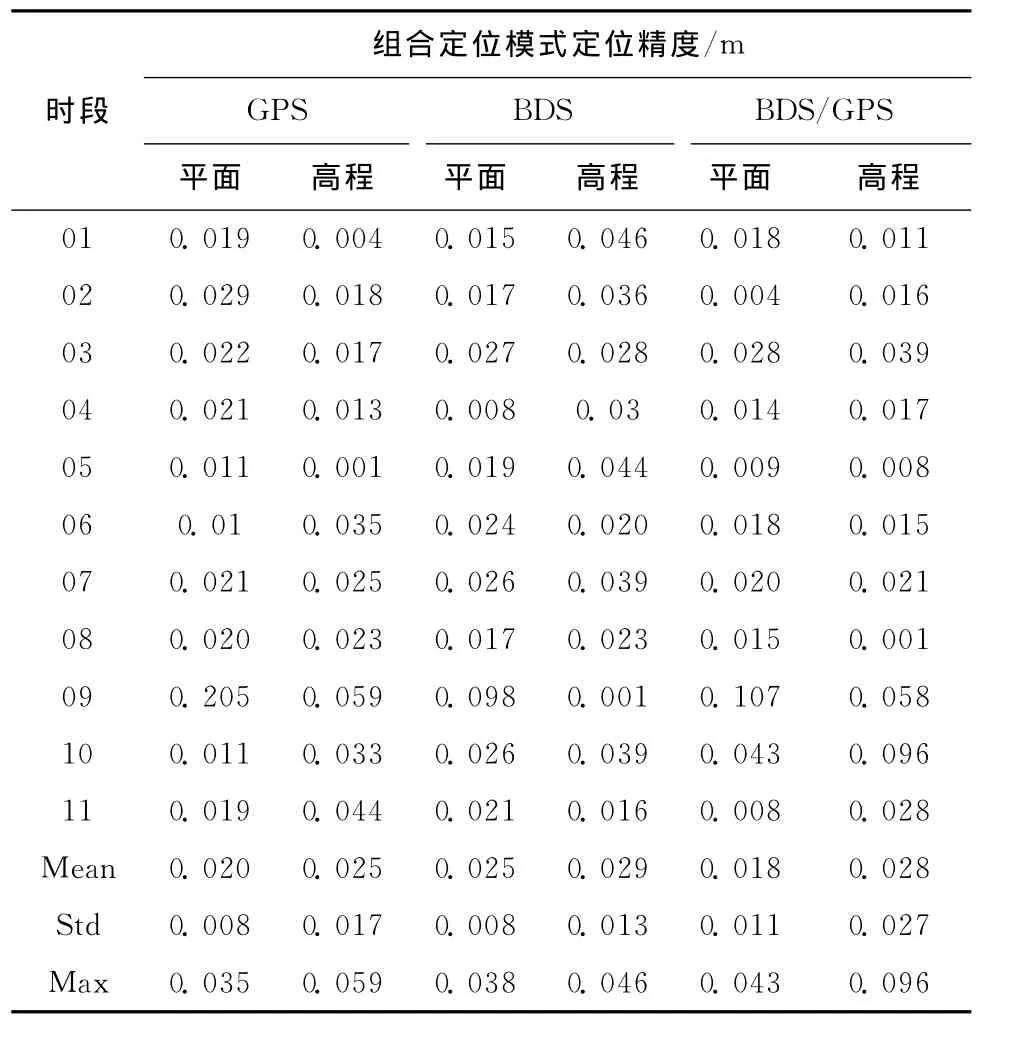
表4 BDS雙模網絡RTK組合定位精度測試結果
如表4和圖7所示,各測試點三種模式的NRTK定位精度主要保持平面1~2cm,高程3~4cm水平,且相比于GPS,BDS和BDS/GPS雙模NRTK在定位精度上沒有表現出顯著提高,基本保持同一精度水平。這同時也表明,BDS和BDS/GPS雙模NRTK技術已具備在國內和亞太地區進行高精度定位服務的能力。
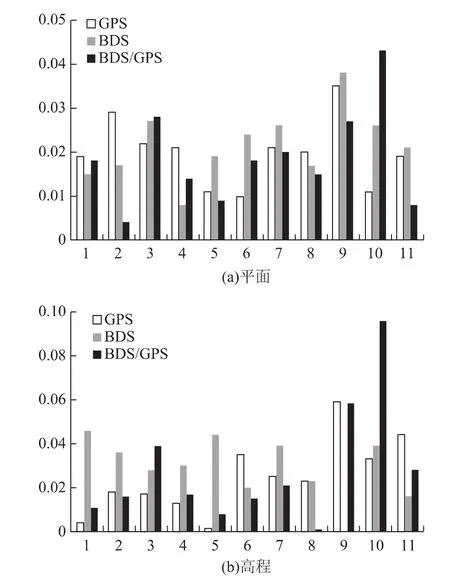
圖7 網絡RTK定位模式平面及高程定位精度差異柱狀圖/cm
4 結束語
本文利用惠州市GPS CORS系統進行了BDS雙模CORS更新升級試驗,采用基于Ntrip的雙中心并行模式設計和數據實時分流技術,實現了包括GPS、BDS、BDS/GPS雙模三種網絡RTK組合定位服務的區域覆蓋。BDS雙模CORS試驗網建設表明,雙中心并行模式相比單中心模式對于原有CORS系統軟硬件設備和服務,具有更好的利用效率,同時具有很好的系統完備性,是目前BDSCORS系統更新升級并實現BDS雙模組合網絡RTK定位服務的可行方案。
野外網絡RTK定位性能測試結果表明,與GPS相比,BDS網絡RTK定位在初始化時間方面提高56%,在定位精度方面基本達到相同水平;BDS/GPS雙模網絡RTK定位的可見衛星數量提高1.5倍、GDOP值下降44%、初始化時間減少66%、定位精度水平也達到3~4cm水平。這表明BDS網絡RTK定位已具有與GPS同樣滿足應用的技術性能,而BDS/GPS雙模網絡RTK定位因為具有更強的衛星觀測條件和環境適應性,將在城市、山區等在高精度動態測繪領域發揮巨大的潛力,得到廣泛應用。
[1]CHEN He-chin,HUANG Yu-sheng,CHIANG Kai-wei,et al.The Performance Comparison between GPS and BeiDou-2/Compass::A Perspective from Asia[J].Journal of the Chinese Institute of Engineers.2009,32(5):679-689.
[2]周樂韜.連續運行參考站網絡實時動態定位理論算法與系統實現[D].成都:西南交通大學,2007:35-47.
[3]SHI Chuang,ZHAO Qi-le,HU Zhi-gang,et al.Precise Relative Positioning Using Real Tracking Data from COMPASS GEO and IGSO Satellites[J].GPS Solution,2013,17(1):103-109.
[4]MONTENBRUCK O,HAUSCHILD A,STEIGENBERGER P,et al.Initial Assessment of the COMPASS/BeiDou-2Regional Navigation Satellite System[J].GPS Solution,2013,17(2):211-222.
[5]WEBER G,MERVART L.BKG Ntrip Client(BNC)Version 2.3Manual[EB/OL]].(2010-08-23)[2013-12-22].http://igs.bkg.bund.de/index_ntrip_down.htm.
[6]李健.聯合型連續運行基準站網的動態定位服務機制[D].鄭州:解放軍信息工程大學,2011:38-42.
[7]黃丁發,周樂韜,李成鋼,等.增強虛擬參考站網絡系統軟件(VENUS)研制[J].武漢大學學報:信息科學版,2008,33(2):172-176.
[8]唐衛明,劉經南,陳日高.PowerNetwork軟件關鍵技術介紹和性能分析[J].武漢大學學報:信息科學版,2008,33(8):868-871.
[9]黃丁發,李成鋼,吳耀強,等.GPS/VRS實時網絡改正數生成算法研究[J].測繪學報,2007,36(3):256-261.
[10]唐旭,何秀鳳.北斗衛星導航系統高精度相對定位性能分析[J].導航定位學報,2013,1(3):28-30.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
今日農業(2019年14期)2019-09-18 01:21:54
今日農業(2019年12期)2019-08-15 00:56:32
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
今日農業(2019年10期)2019-01-04 04:28:15
今日農業(2019年15期)2019-01-03 12:11:33
今日農業(2019年16期)2019-01-03 11:39:20