通用GPS網平差數據預處理方法研究
2014-07-25 11:28:52許雙安
鐵道勘察 2014年2期
許雙安
(中鐵第一勘察設計院集團有限公司,陜西西安 710043)
通用GPS網平差數據預處理方法研究
許雙安
(中鐵第一勘察設計院集團有限公司,陜西西安 710043)
首先從基線計算文件中提取基線觀測值及其方差-協方差陣,多基線解模式數據須考慮同步基線間的隨機相關性,重新構造基線向量及其全方差協方差矩陣;再進行同步環閉合差、異步環閉合及基線重復性檢核,剔除含有明顯粗差的基線;采用最優模型從上述步驟中保留下的基線數據中提取獨立基線,得到較“干凈”的觀測值;最后進一步處理殘留粗差,采取三維無約束平差結合基于相關分析的粗差探測方法進行粗差探測,為后續平差數據處理做好準備工作。
數據預處理 三維無約束平差 粗差探測
GPS基線網平差數據處理是對GPS靜態相對定位技術獲取的三維基線向量成果進行質量檢核、平差計算及坐標轉換等各項處理,最終獲得測站點的WGS84坐標系下的三維坐標及特定坐標系下的空間三維或平面二維坐標成果及轉換參數。GPS觀測數據質量受到衛星系統、空間傳播路徑及接收機系統帶來多種誤差影響[1],野外檢核條件也較少,觀測量中經常含有粗差。采取精密模型解算基線,得到的基線向量中已經剔除了大部分的粗差,但仍會殘留一小部分粗差,將嚴重損害GPS定位的精度。在通用高精度GPS網平差軟件研制的實踐中,必須對基線向量中的粗差進行分析和處理,數據預處理質量將直接影響定位結果的可靠性和精度,是軟件研發的重點和難點之一。主要探討通用GPS控制網平差數據處理系統(GPSNetworkAdjust)研發過程中的數據預處理問題,分析總結了多種粗差分析策略,設計了通用GPS控制網平差數據預處理方法,并在通用GPS控制網平差數據處理系統中進行算法實現和驗證,提高GPS網平差處理的可靠性。
1 平差觀測值提取
同步基線數據是以觀測時段為基本單元的基線向量文件,由基線處理軟件輸出,其格式各不相同,平差時提取每條基線的三維基線分量作為平差的觀測值,基線的方差協方差陣作為隨機模型進行定權。
基線解模式考慮了同步觀測基線間隨機相關,給出解算所得測站坐標分量(地心緯度N,地心經度E,地心向徑U)的方差及其全相關系數陣(3×n維方陣),同時也給出了每條基線三維分量及單條基線分量間相關系數矩陣。平差時若忽略基線之間的相關性, 方差-協方差陣為對角陣,差后點位坐標偏差可達到毫米級,特殊情況達到數個毫米,同時對轉換參數和單位權方差也有一定的影響[2],高精度GPS 網平差中不容忽視。應考慮基線間的隨機相關性,以保證模型的嚴密性,多基線解數據應重新構造基線觀測值及方差協方差陣,轉換過程如下:
(1)依次將每點(第i點)由地心緯度坐標系轉換成地心空間直角坐標,公式為
(1)
(2)求微分關系式
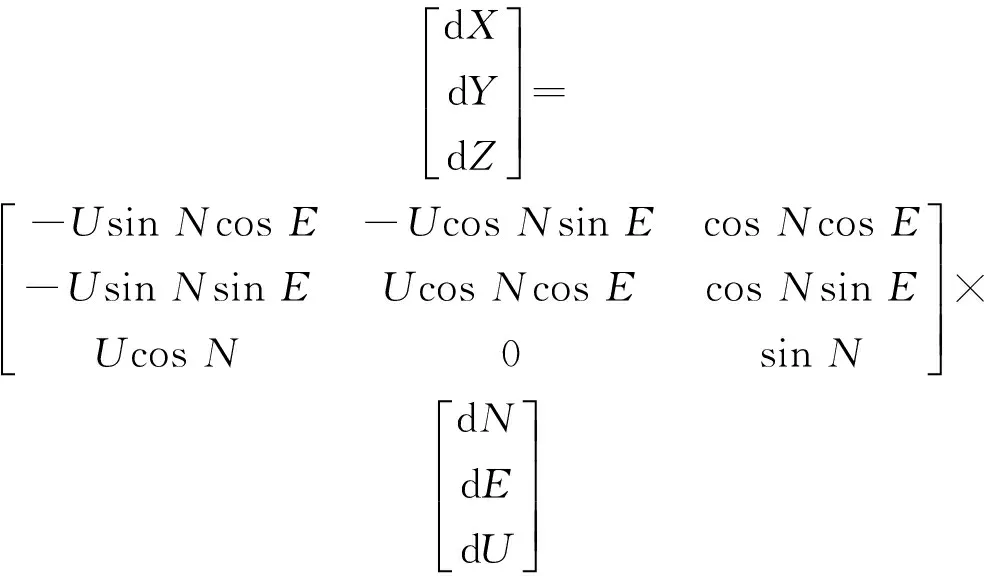
(2)
根據協方差傳播定律,利用微分關系將同步網在地心緯度坐標系下的方差-協方差陣轉換到空間直角坐標系下的方差-協方差陣,公式為
(3)

GPSNetworkAdjust在對多基線解模式解算出的基線進行平差時,內置了兩種模式。第一種模式是考慮同步觀測基線問的誤差相關性,利用平差測站坐標及坐標全相關系數陣構造基線及其方差-協方差陣,第二種模式是不考慮同步基線之間的相關性,直接讀取基線解文件中每條基線向量及基線向量間的相關系數陣構造方差-協方差陣。以某客運專線CP0控制網基線數據為例,采用兩種模式對基線數據進行三維無約束平差,隨機模型相關和隨機模型獨立平差坐標較差結果見表1。
從表1兩種模式較差可以看出,對于多基線解數據,考慮基線間隨機模型相關和隨機模型,獨立平差后坐標值略有差異,在本算例中坐標分量最大到0.8 mm。由此可見,忽略基線間隨機相關性,點位坐標會產生偏差,這在高精度GPS 網平差中不容忽視。所以,在高精度GPS網平差過程中,應考慮基線間的隨機相關性,以保證模型的嚴密性。
2 基線數據預處理
在平差前對導入的基線數據進行質量檢核,剔除含有粗差的基線數據,選取一組滿足平差要求的數據用于平差計算。數據預處理菜單包括同步環閉合差計算、異步環閉合差計算、重復基線較差計算及重復性擬合。
2.1 閉合差檢核
同步觀測環是三臺或三臺以上GPS接收機進行同步觀測所獲得基線向量構成的閉合環。同步環閉合差從理論上講應等于零,若解算基線向量采用單基線解模式求解,由于計算環中各基線向量時所用的觀測資料和處理方式實際并不嚴格相同,數據處理軟件不夠完善,以及計算過程中舍入誤差等原因,同步環閉合差實際并不為零。同步環閉合差從某一側面反應了GPS測的質量。
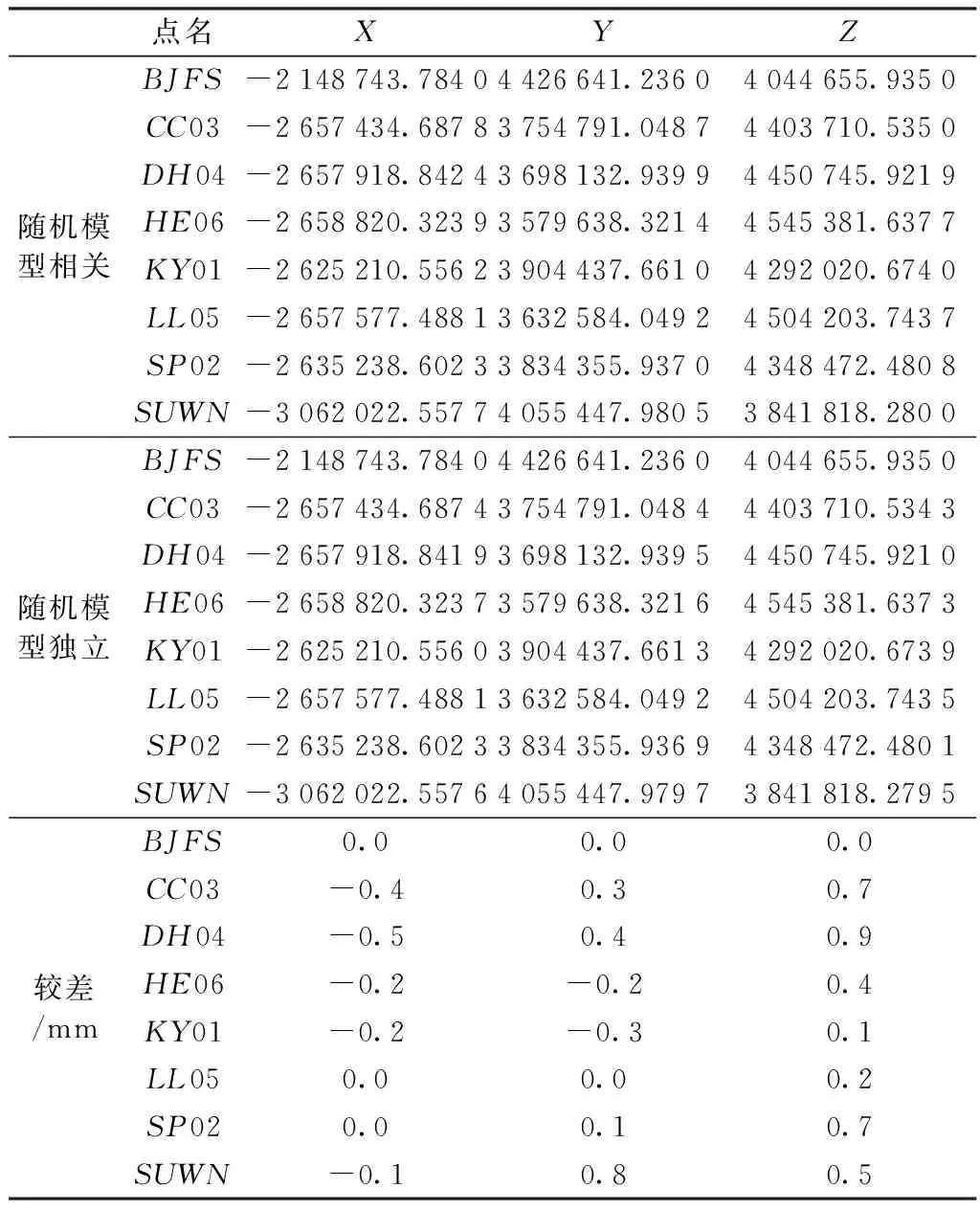
表1 兩種模式平差后坐標較差 m
異步環也稱非同步觀測環,是由獨立基線所構成的閉合環。異步環檢驗能更加充分地暴露出基線向量中存在的問題,更客觀地反映GPS觀測質量。
GPS基線分量閉合環(同步環和異步環)閉合差的大小,直接反映出基線觀測量的實際精度,并由此可以發現GPS網中大的粗差觀測值。基線分量的閉合差檢驗公式為
(4)
在同步環/異步環閉合差計算過程中,自動搜索閉合環是一個核心問題,一般只計算最小獨立環。最小獨立環應滿足以下條件[3]:
(1)多邊形還應該是相互獨立(線性無關)的。獨立閉合環個數為r=n-t+1;n為基線數,t為測站點個數。保證閉合環獨立的方法是,每個新找到的閉合環都有前面找到的閉合環中不曾使用的基線觀測值。
(2)在多邊形環獨立的情況下,閉合環的邊長最短。
常用方法有:基于鄰接矩陣的變換的搜索法;基于生成樹和余樹變換的閉合環搜索法;基于深度優先搜索的閉合環搜索法[4]。考慮到誤差傳播定律的性質,測站中誤差與基線距離的平方根成正比。因此,最優的閉合環搜索法應是基于深度優先搜索的閉合環搜索法。
2.2 基線重復性檢核
最小獨立環閉合差結合基線重復性檢核,可排查出含有粗差的基線。基線分量或邊長Ci的重復性定義為[5]
(4)

每條基線的重復性計算后,就可以對各基線邊長分量、北分量和東分量的重復性進行固定誤差與比例誤差的直線擬合,以作為衡量基線精度的參考指標,擬合方式如下
(6)
式中,Ls為基線長度,a為固定誤差,b為比例誤差。
基線重復性反映了定位的內部精度,通過重復性檢驗可以發現異常的測站和衛星,從而發現異常的觀測時段,達到粗差定位的目的。同時重復基線分量或長度較差也具有發現異常基線的功能。
通過基線重復固定誤差與比例誤差擬合分析,一方面可以對基線觀測精度是否符合規范要求進行檢核,另一方面擬合出的固定誤差和比例誤差可以對基線向量隨機模型進行校正。GPSNetworkAdjust在基線預處理時增加了基線重復性固定誤差和比例誤差的擬合模塊,滿足《全球定位系統(GPS)測量規范》(GB/T 18314—2009)對高等級GPS控制網質量檢核的要求,彌補了常用商業軟件的不足。
2.3 獨立基線提取
當有N臺GPS接收機進行了一個時段的同步觀測后,每兩臺接收機之間就可以形成一條基線向量,共有N(N-1)/2條同步觀測基線,可以選出相互獨立的N-1條同步觀測基線。凡是構成了閉合環的同步基線是幾何相關的,獨立基線可以消除同步環幾何相關,減少計算量,精度評定更真實。GPSNetworkAdjust系統內置了多種獨立基線提取方法,如圖1。

圖1 GPSNetworkAdjust提取獨立基線方法對話框
傳遞式:即為順序連線法,從每個時段基線數據中選擇一條基線開始順序向前遞推連線,如圖2。
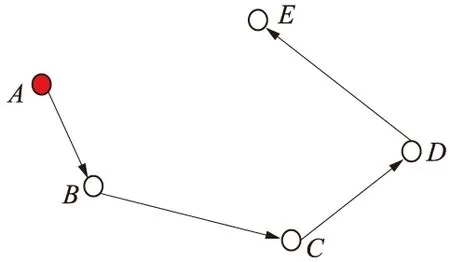
圖2 傳遞式方案挑選的獨立基線
散射式:對于射線法,分為從每個時段的第一條基線的起點找射線方法和隨機在該同步時段的測站中選擇一點找射線方法,如圖3所示。
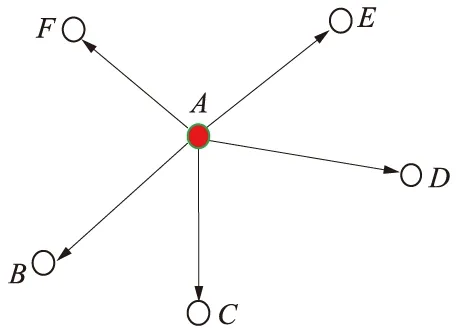
圖3 散射式方案挑選的獨立基線
全選式:將所有的基線向量都作為平差觀測值,不區分同步基線和獨立基線,全部基線參與平差計算。
相鄰最短邊式:采用順序連線法,但是相鄰點滿足路徑最短約束條件。同步環中,高精度的基線向量一般通過雙差的平差方式獲得,而雙差的最大特點就是利用差分消除定位中的部分系統誤差,差分效果的優劣直接取決為站間距離的長短,測站間距離越短,差分效果越好,基線精度越高[6]。另外,根據誤差傳播定律的性質,測站中誤差與基線距離的平方根成正比[7]。因此,最優的獨立基線網應是平均路徑長度最短的基線網,即滿足條件
(6)
式中n為測站點個數,li為選擇的獨立基線。
加權最短路徑式:采用順序連線法,考慮到不同基線的解算精度存在差異,引入基線長度的觀測權,基線網加權平均路徑最短。即滿足條件
(7)
式中pi為代表基線li的權。
3 三維無約束平差及粗差探測
在WGS84坐標系下進行三維無約束平差,沒有引入外部觀測值及起算基準,避免了約束基準兼容性問題及外來粗差干擾,可充分利用觀測值改正數進行粗差探測。采用基于相關分析粗差探測算法,驗證發現基線向量中是否存在粗差,剔除含有粗差的觀測值。經過三維無約束平差,GPS基線網質量內部符合性得到檢核,為后續約束/聯合平差提供了“干凈”的觀測值和合理的隨機模型。
3.1 三維無約束平差
假設全網共有n個GPS點,記為Pi(i=1,2,3…n);通過觀測共有m條獨立基線向量。在WGS空間直角坐標系中,以測站空間三維直角坐標改正數為待求參數,全網的誤差方程組為

(8)
為了使平差進行下去,還必須引入位置基準。第一種方法是以GPS網中一個點的地心坐標作為起算數據的位置基準;第二種采用秩虧自由網基準。GPSNetworkAdjust采用第一種引入方法,基準方程為
(9)

3.2 基于相關分析的粗差探測
在一個同步網內,不但一條基線的各分量之間存在相關性,而且基線與基線之間也存在這種相關性。在相關觀測量的最小二乘平差中,一個觀測量的誤差,通過觀測量之間誤差的相關性和圖形幾何條件的關聯性,反映于其他觀測量的平差改正數之中。當一個觀測量含有粗差時,必將或多或少地影響到其他觀測量的改正數,可采用基于相關分析的粗差探測方法[8]。
可靠性矩陣R=QVVP的大小反映了觀測值的誤差作用于觀測值改正數的程度
(10)
其中,A為誤差方程組的系數矩陣,P是觀測量的權陣,V為觀測值改正數向量,QVV為觀測值改正數的協因數陣。設ε為觀測值誤差,且有
(11)
將上式展開整理得
(12)
稱Fi為觀測值i的誤差εi對改正數向量V的影響向量,Fi由誤差方程組系數矩陣A和觀測量權陣P決定。根據下面給出的假設檢驗方法進行粗差探測,若相關性顯著,則觀測值i就可能包含粗差。Fi對V的相關系數為
(13)

(14)
當存在多個含有粗差的觀測量時,可能會使得某個非粗差的觀測量與V顯著相關,在程序編制中,為了避免這種“存偽”的情況,在粗差判別時加入vi>2δvi的附加條件,即當Fi對V的相關性顯著,且有vi>2δvi時,判定該觀測量為粗差。本文基線數據預處理及粗差探測算法流程圖見圖4。

圖4 基線數據預處理及粗差探測算法流程
4 結束語
首先從基線計算文件中提取基線觀測值及其方差-協方差陣,多基線解模式數據須考慮同步基線間的隨機相關性,重新構造基線向量及其全方差協方差矩陣;再進行同步環閉合差、異步環閉合差及基線重復性檢核,剔除含有明顯粗差的基線;采用最優模型從上述步驟中保留下的基線數據中提取獨立基線,得到較“干凈”的觀測值;最后進一步處理殘留粗差,采取三維無約束平差結合基于相關分析的粗差探測方法進行粗差探測,為后續平差數據處理做好準備工作。在自主研發的GPS數據處理軟件GPSNetworkAdjust上進行平差,其結果與國際上常用的數據處理軟件得到的結果相當,驗證了數據預處理結果的可靠性。GPSNetworkAdjust在基線預處理時增加了基線重復性固定誤差和比例誤差的擬合模塊,滿足《全球定位系統(GPS)測量規范》(GB/T 18314—2009)對高等級GPS控制網質量檢核的要求,利用基線計算獲得測站坐標及坐標全相關系數陣構造基線及其方差-協方差陣,理論上更嚴密,適用于大范圍高精度GPS控制網的數據平差,彌補了常用商業軟件的不足之處。
[1] 李征航,黃勁松.GPS測量與數據處理[M].武漢:武漢大學出版社,2010:75
[2] 黃觀文,張勤,丁曉光,等.一種高精度GPS基線網平差及軟件實現[J].測繪科學,2009,34 (2):167-169
[3] 宋力杰.測量平差程序設計[M].北京:國防工業出版社,2012:200
[4] 趙一晗,伍吉倉.控制網閉合環搜索算法[J].鐵道勘察,2006(3):12-14
[5] GB/T 18314—2009全球定位系統(GPS)測量規范[S]
[6] 黃觀文.GPS精密單點定位和高精度GPS基線網平差研究及其軟件實現[D].西安:長安大學,2009:70
[7] 王磊,李盼,呂翠仙.關聯矩陣法在獨立基線及獨立雙差模糊度選擇中的應用[J].武漢大學學報:信息科學版,2010,35(6):715-718
[8] 陶本藻,姚宜斌,施闖.基于相關分析的粗差可區分性[J].武漢大學學報:信息科學版,2004,29(10):881-883
[9] 許雙安.基于EGM2008模型的GPS高程轉換方法研究[J].鐵道勘察,2012,38(5):31-34
[10]騰煥樂.隧道GPS控制網橫向貫通誤差計算方法研究及軟件研制[J].鐵道勘察,2013,39(2):4-6
DataPreprocessingMethodForGeneralGPSNetworkAdjustment
XU Shuan-gan
2013-12-30
許雙安(1986—),男,2011年畢業于武漢大學測繪學院,工學碩士,工程師。
1672-7479(2014)02-0049-05
P207+.2
: A
