單載波高速相干水聲通信技術研究
2014-07-26 01:21:00余佳超劉文慧
廈門大學學報(自然科學版) 2014年1期
余佳超,劉文慧,蘇 為
(廈門大學 信息科學與技術學院,水聲通信與海洋信息技術教育部重點實驗室,福建 廈門361005)
水聲信道是時變、空變多途擴展信道.單載波高速水聲通信受通信帶寬受限(10km距離上可用帶寬小于10kHz)、多途結構復雜(多途時延擴展可達幾十甚至幾百個碼元)、碼間干擾(inter-symbol-interference,ISI)嚴重的影響,傳統時域判決反饋(DFE+PLL)結合二階數字鎖相環技術存在易受均衡器階數、迭代步長初值設定影響的問題,魯棒性差[1].本文針對水聲信道的稀疏特點,采用復雜度較低的稀疏水聲信道估計算法(DAMP)估計信道[2],在此基礎上設定判決反饋均衡器(DFE)前饋和反饋階數及權系數初值,提高了均衡魯棒性和收斂速度.進一步,針對水聲信道的時變、空變衰落特點,采用空域分集接收.在不影響通信數據率的前提下,提高了系統魯棒性.
1 判決反饋均衡器技術
判決反饋均衡器是非線性的,由一個前饋橫向濾波器和一個反饋橫向濾波器組成,反饋橫向濾波器已前達符號的判決序列作為其輸入.從功能上講,通過反饋濾波器從當前估計值中除去了前達碼元的干擾,適用于復雜的水聲信道環境.但水聲信道是一個雙擴展信道,不僅具有多途效應,還有多普勒時變效應.為此,Stojanovic[3]提出了內嵌數字鎖相環的判決反饋均衡結構,如圖1所示.
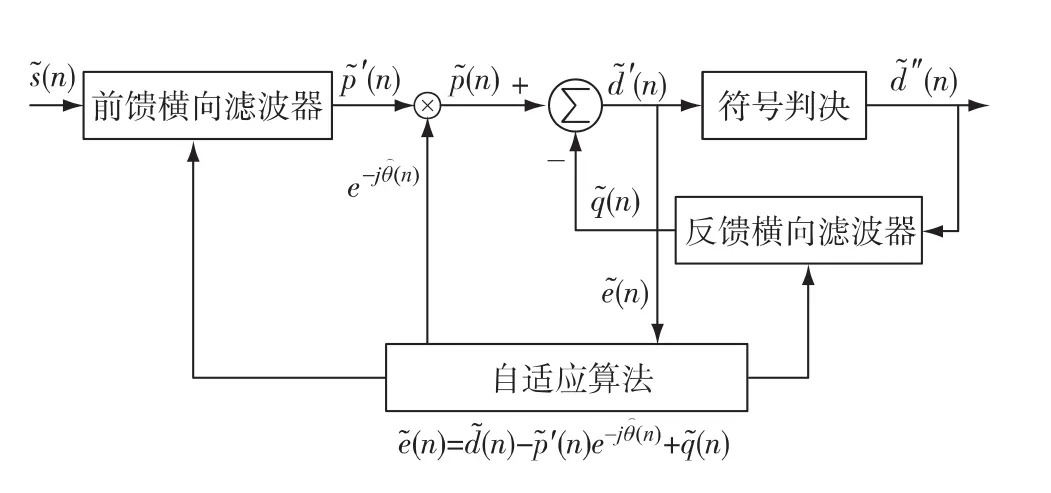
圖1 內嵌數字鎖相環的判決反饋均衡器結構框圖Fig.1 The structure diagram of decision feedback equalization with digital phase-locked loop




在采用最小二乘(LMS)算法時,前饋濾波器權值更新為

反饋濾波器的權值更新式為



對均方誤差求導得

令ψ(n)=Im{p′(n)e-j^θ(n)e*(n)},由下式迭代得到對載波相位差的估計值

式中,K1為載波相位的更新步長.為增強載波跟蹤能力,可進一步采用二階鎖相環,對應的載波相位迭代公式為

多途傳播造成的頻率選擇性衰落(隨時間、空間變化)是高速相干水聲通信的一大難題,單通道處理往往有所不足[4].多通道判決反饋均衡器如圖2所示.利用了水聲信道的空變特性,對抗時、空變衰落,提高通信的魯棒性.但該技術存在對均衡器階數、權系數初值)以及迭代步長敏感的缺點.因此,我們對低信噪比下精確的信道估計技術進行了研究,以信道估計結果設計均衡器前饋、反饋階數和均衡器初值,提高了系統魯棒性.
2 DAMP
研究中采用DAMP,將信道估計結果變換后作為權值的初值[5].為提高信道估計的準確性,采用循環前綴技術(cyclic prefix,CP),信號結構如圖3.信道估計信號連續發送2次,以利于信道估計.其中CP的作用是使信道由線性卷積轉化為循環卷積,以利用于頻域處理,對信道變化進行跟蹤.
去CP后,信道估計段接收信號表示為
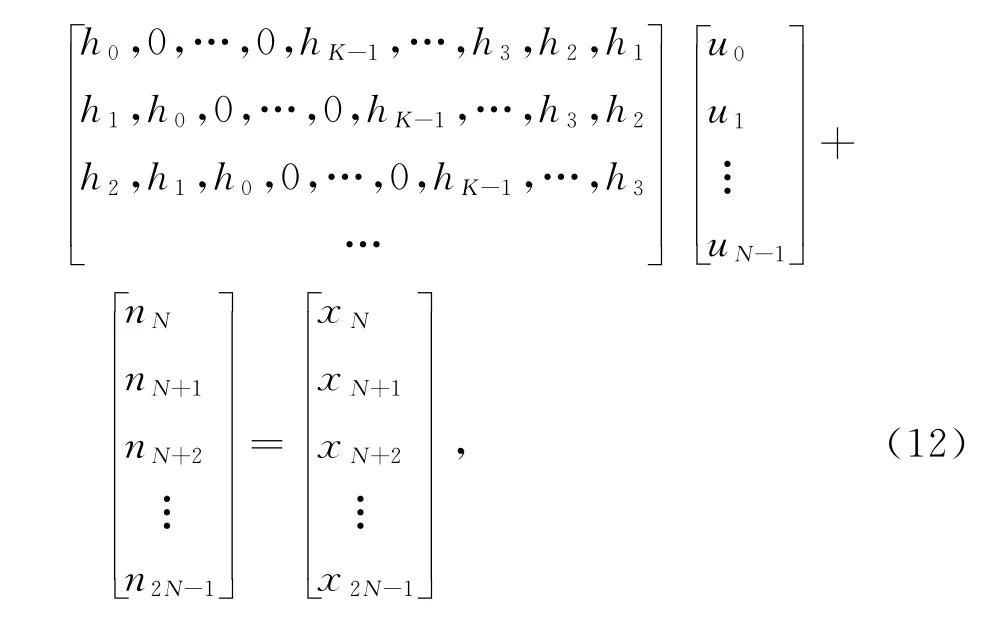
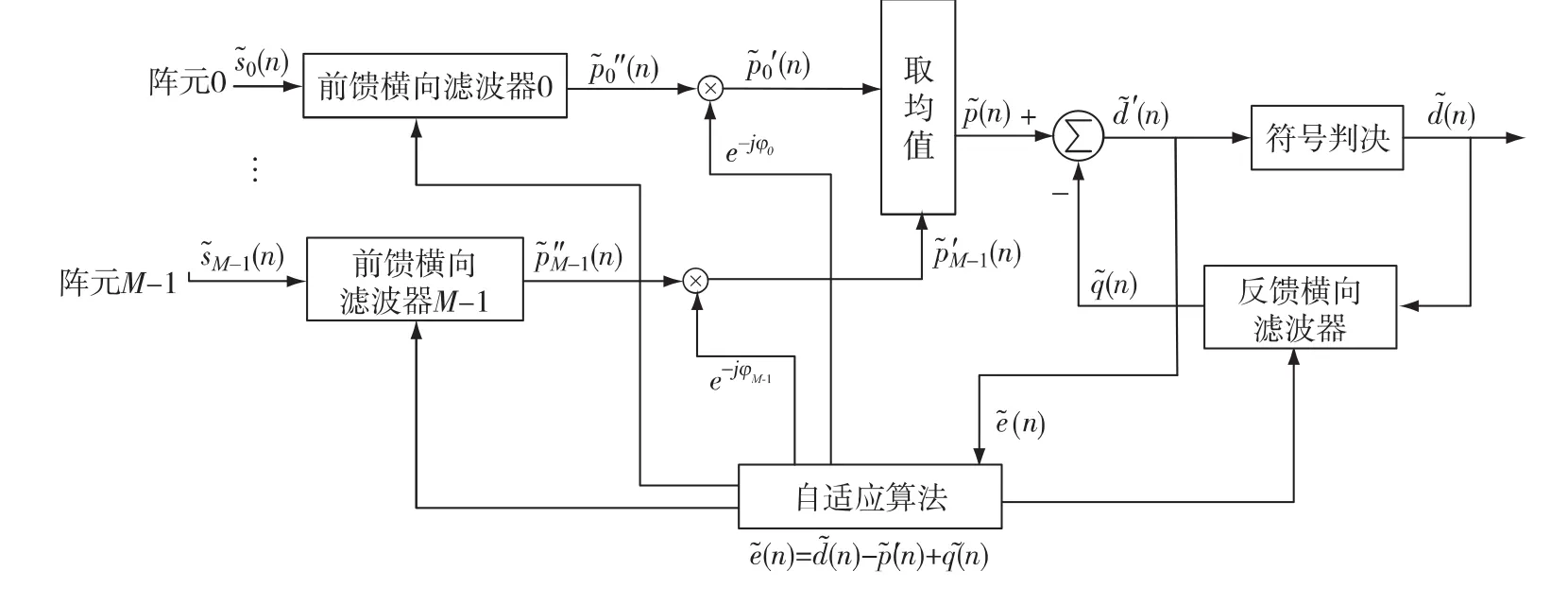
圖2 多通道判決反饋均衡器結構圖Fig.2 The structure diagram of multi channel decision feedback equalization

圖3 發送信號幀結構Fig.3 The structure of sending signal frame

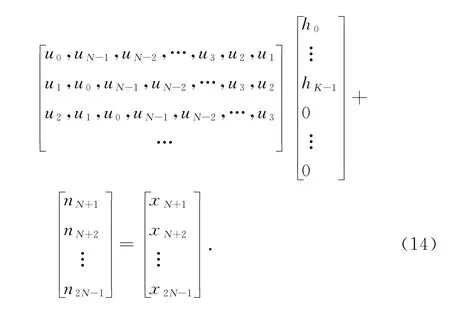
由于h本身具有稀疏性,該問題可采用匹配跟蹤(MP)和最優化方法求解.研究中基于MP思想,我們提出了一種低復雜度的DAMP稀疏信道估計算法.利用估計結果,即可對均衡器階數、初始權值和迭代步長進行最優設計,提高收斂速度,降低均衡器復雜度.
3 實驗結果
在廈門港10km距離高速水聲通信實驗.實驗位置處于廈門港航道中,接收端相對發送端更靠近大陸(島嶼).該海域水深在18m左右,最深可達20m.具體實驗環境見表1.
同時,信號采用四相相移鍵控信號(QPSK)的調制方式,其參數見表2.
圖4為廈門港區典型信道估計結果.廈門港區水深接近20m,其多途達到時間集中,且存在與主徑能量接近的多途信號.圖4(b)中紅色部分能量最高,藍色最低.
圖5給出單通道接收(對應表3第4路數據)和多通道接收(對應表3第1路數據)的均衡器均方誤差收斂曲線.圖6為單輸入單輸出系統(SISO)和單輸入多輸出系統(SIMO)信號均衡器輸出星座圖,圖7為SISO和SIMO信號處理后的接收端恢復的圖片.
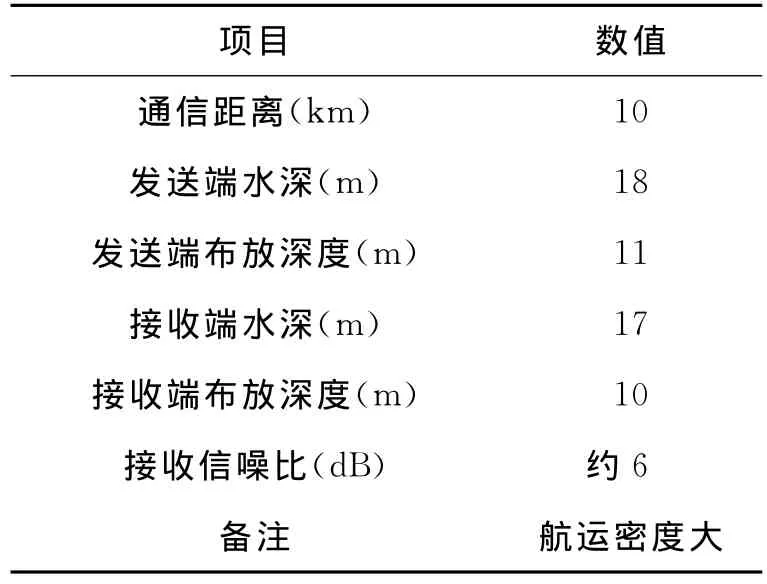
表1 廈門港區海試實驗環境Tab.1 The ocean experimental environment in Xiamen Harbor
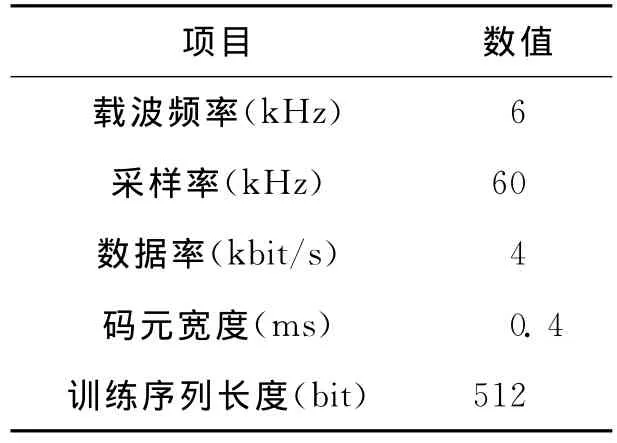
表2 實驗參數Tab.2 The experimental parameters
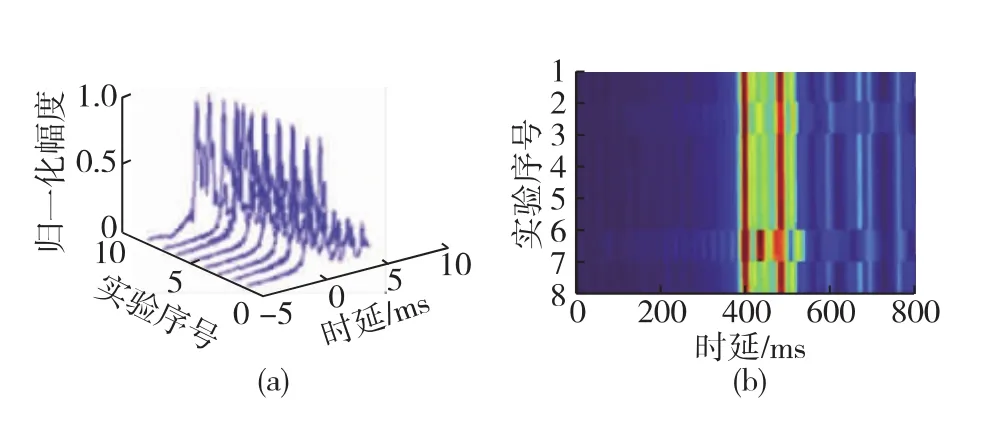
圖4 廈門港區典型信道結構Fig.4 The typical channel structure in Xiamen
對比圖5(a)和(b)可以看出,SISO 下,信號的均方誤差收斂速度較慢,而SIMO下,信號收斂速度明顯快很多,SIMO下有較好的魯棒性.對比圖6(a)和(b)可以看出,SISO下,均衡器輸出信噪比已經有較為不錯的結果,尤其是第2幀數據,該路數據誤碼率為1.46%(見表3).而SIMO下,可以看出其均衡器輸出信噪比有進一步提高,誤碼率趨近于0.可見SISO接收在低信噪比下采用本文方法仍然可以收斂,達到1.46%的誤碼率.但也反映出SISO易受信道時變、空變的影響,魯棒性差.而采用SIMO接收,即便部分通道性能較差,但通信的魯棒性顯著提高.
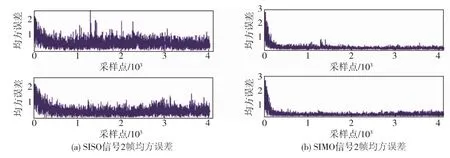
圖5 均方誤差收斂曲線Fig.5 Mean square error convergence curve
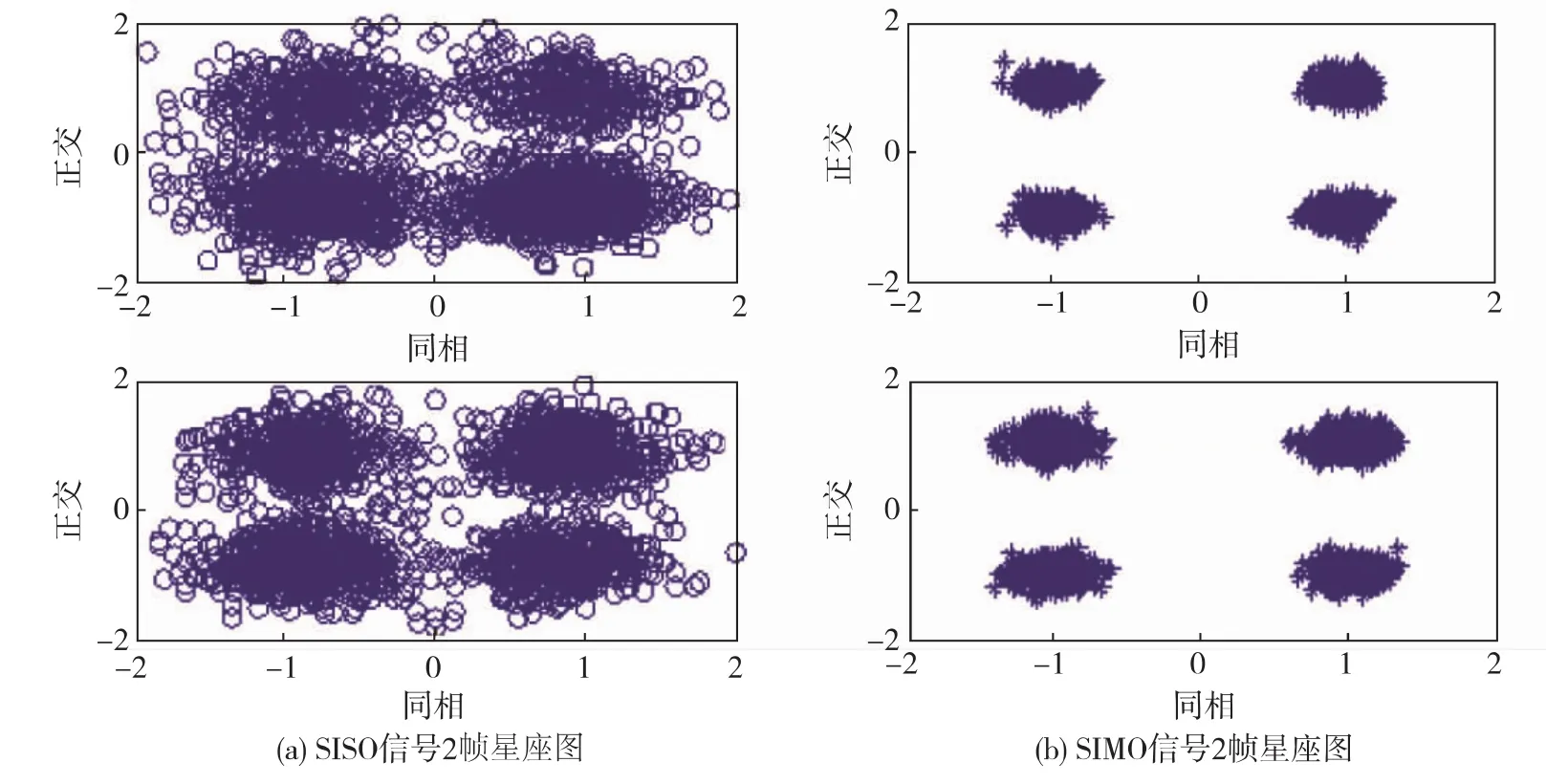
圖6 星座圖Fig.6 Constellation diagram
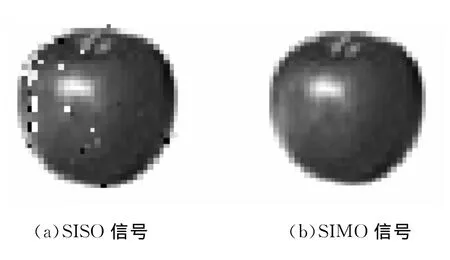
圖7 恢復圖片Fig.7 The recovered pictures
表3詳細給出了實驗結果,其中,第4路處理后誤碼率相對較大,故在多通道時主要針對這組數據.表中未寫出的其他路數據組合的多通道(2個通道和3個通道)處理后,誤碼率均降低到10-4數量級以下.
給出海試處理結論:1)SISO下,當信道比較簡單,信噪比較高時,可以達到0誤碼率,而當信道相對比較復雜,信噪比較低時,其誤碼率較大;2)SIMO下,通道數較多或單通道處理時結果較好時,其誤碼率可以有效降低,其中,實驗5誤碼率降低到0.04%以下,而其他組實驗誤碼率均降到10-4數量級;3)對比SISO、SIMO可以看出,SIMO有更高的魯棒性,且通道數足夠多的情況下,其誤碼率可以降低到10-4數量級以下.
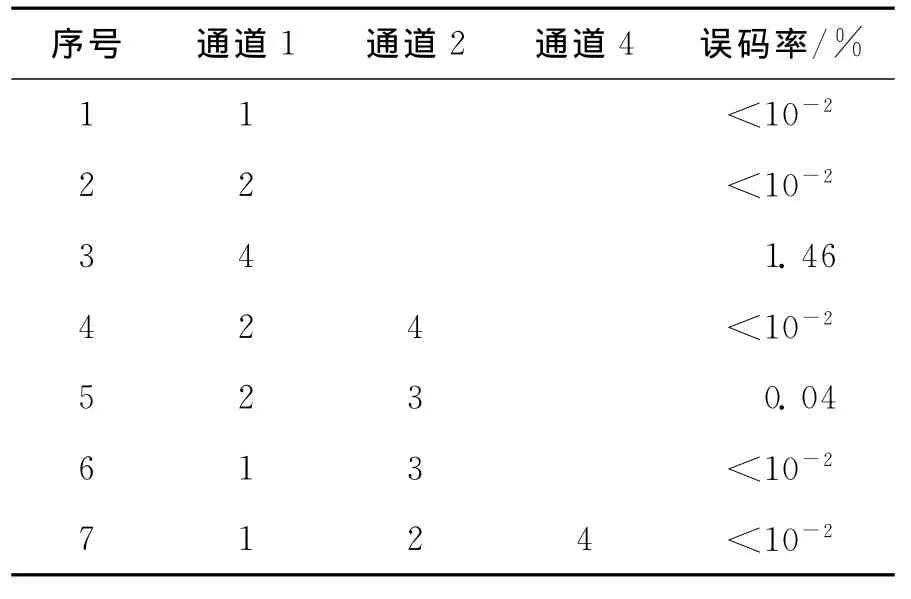
表3 實驗結果誤碼率Tab.3 The experimental result of SNR
4 結 論
論文針對水聲信道的稀疏特點,采用復雜度較低的DAMP估計信道,在此基礎上設定DFE前饋和反饋階數及權系數初值,提高了均衡魯棒性和收斂速度.進一步,針對水聲信道的時變、空變衰落特點,采用空域分集接收.在不影響通信數據率的前提下,提高了通信魯棒性.進行了多次海上實驗,表明:在廈門港10 km距離,接收信噪比均值約為6dB的環境下,4kbit/s通信數據誤碼率均小于2%,傳輸圖片清晰.結合多通道處理,在通道數足夠多的情況下,其誤碼率可以降低到10-4數量級以下.
[1]夏夢露.淺水起伏環境中模型-數據結合水聲信道均衡技術[D].杭州:浙江大學,2012.
[2]Xia M L,Xu W,Sun F,et al.Experimental studies of time-reversal underwater acoustic communications[C]∥Proc OCEANS 2009.Bremen,Germany:IEEE,2009:1-5.
[3]Song H C,Roux P,Hodgkiss W S,et al.Multiple-inputmultiple-output coherent time reversal communications in a shallow water acoustic channel[J].IEEE Journal of O-ceanic Engineering,2006,31(1):170-178.
[4]Yang T C.Correlation-based decision feedback equalizer for underwater acoustic communications[J].IEEE Journal of Oceanic Engineering,2005,30(4):865-880.
[5]房棟,李宇,尹力,等.水聲通信中一種聯合同步均衡的實現方法[J].聲學技術,2008,27(5):418-419.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國生殖健康(2019年3期)2019-02-01 06:12:26
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
