直流變換器模式快速識別PI自適應控制策略
2014-07-31 20:18:01范學鑫馬偉明
艦船科學技術 2014年3期
范學鑫,馬偉明,謝 楨,肖 飛,紀 鋒
(海軍工程大學 艦船綜合電力技術國防科技重點實驗室,湖北 武漢 430033)
直流變換器模式快速識別PI自適應控制策略
范學鑫,馬偉明,謝 楨,肖 飛,紀 鋒
(海軍工程大學 艦船綜合電力技術國防科技重點實驗室,湖北 武漢 430033)
針對三電平H橋直流變換器在傳統的PI控制下,受到電流連續模式和電流斷續模式切換大擾動時動態性能較差的問題,提出一種新穎的模式快速識別PI自適應非線性控制策略。采用狀態空間平均法和開關網絡平均法,建立變換器在2種模式下的數學模型,并設計了數字控制器。控制器有效提取了電感電壓特征,能在一個開關周期內對模式進行快速識別,克服依據電感電流檢測模式速度慢且準確性不高的問題,從而根據模式實時改變PI參數以實現最佳的動態性能。將新型控制策略和傳統PI控制進行對比實驗研究。實驗結果表明,變換器在突加50%負載工況后,采用新型控制的輸出電壓最大跌落較傳統控制降低25.2%,從而驗證了該新型控制策略的可行性和有效性。
三電平H橋;電流連續模式;電流斷續模式;自適應控制
0 引 言
由于多電平拓撲能夠解決開關管功率和耐壓的約束,故可以用于實現高壓大功率電能變換裝置,目前已廣泛運用于中高壓大功率交流傳動及高壓直流輸電等領域[1-2]。為實現中壓直流電網至低壓直流電網的能量傳送,本文提出一種帶隔離的三電平H橋直流變換器方案。針對工頻下隔離變壓器體積重量較大的問題,變換器采用PWM移相控制,以提高變換器工作頻率,減小變壓器體積重量。本文在H橋輸出電壓諧波分析的基礎上設計變換器的靜態工作點,并建立電流連續模式(CCM)和電流斷續模式(DCM)下的數學模型,仿真計算結果表明在不同模式下變換器的動態性能差異較大,傳統的PI控制方案難以滿足變換器全負載范圍內的較好動態性能,需要尋找更優的控制策略。
目前,對直流變換器控制策略的研究多集中于一種工作模式設計控制器[3-5],沒有考慮模式切換所引起的擾動。而針對全模式工況,則以非線性控制策略為主,例如滑膜控制器[6]、單周期非線性控制器[7]及基于反饋線性化設計的非線性控制器[8-9]。以上均存在計算量較大,難以用于工程實踐的問題。大部分全工作模式控制器需檢測模式狀態,一般采用檢測電感電流過零點或者電感電流峰值的方法[10]。而無傳感器的模式識別策略也有文獻提出[11],但其準確率存在限制。
在總結前述直流變換器控制策略研究的基礎上,提出一種基于CCM/DCM模式快速識別的PI自適應非線性控制策略。相比于傳統PI控制方法。該控制策略的基本思路是基于電感電壓特征,對系統工作模式快速辨識。然后根據模式變化實時調整控制器參數以達到最佳的控制性能。最后通過實驗驗證該控制策略的可行性和有效性。
1 三電平H橋直流變換器
三電平H橋直流變換器的主電路結構如圖1所示。輸入直流電壓為Ud,P點為直流源正極,N點為直流源負極,O點為中點,輸出直流電壓為uo,前端Cd1和Cd2為直流分壓電容,容值相等,其后為二極管鉗位三電平H橋結構,G1-G8為IGBT,D1-D8為反并聯二極管,Dc1-Dc4為鉗位二極管,Dr1-Dr4為整流二極管,L1為和L2濾波電感,Co為濾波電容,輸出直流電流為io。H橋輸出通過中頻變壓器降壓后,由不控整流橋整流并經LCL濾波器濾波輸出到下級電網。
中點鉗位三電平H橋輸出電壓uT1的波形如圖2所示。其中基準橋臂電壓為uao,滯后橋臂電壓為ubo,α為移相角,θ為導通角,γ為鉗位角(γ=π-θ),開關頻率為fS,角頻率為ωS,開關周期為TS。γ,α和θ記為占空比的形式為dγ=γ/2π,dα=α/2π和dθ=θ/2π。
變換器在實際工作過程中要求uT1的基波幅值較大,且THD盡可能小,這樣有利于將能量通過脈沖變壓器傳送到后端不控整流橋。因此在諧波分析的基礎上可確定系統靜態工作點為:dθ=0.42,dα=0.348。
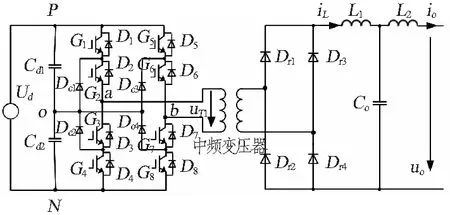
圖1 三電平H橋直流變換器的主電路拓撲Fig.1 The topology of the three-level H-bridge converter
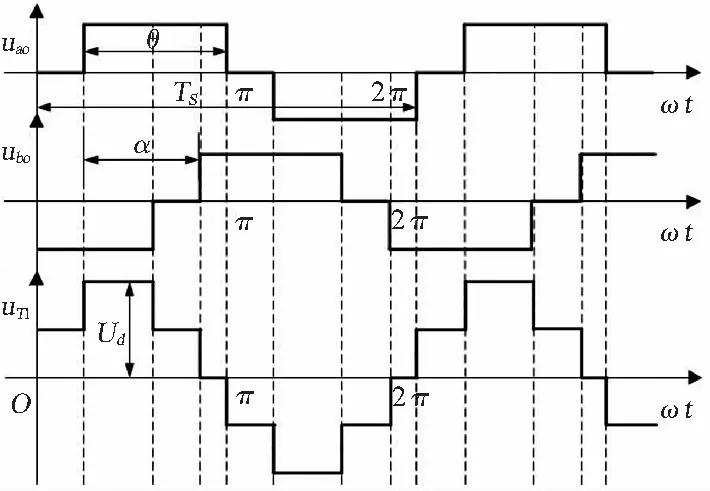
圖2 三電平H橋移相PWM調制下輸出電壓波形Fig.2 The voltage waves of three-level H-bridge with phase-shift control
2 CCM/DCM模式下變換器數學模型
1)模型假設
建模前假設:系統在靜態工作點附近穩定運行;功率管等效為理想開關;L2主要影響系統的高頻特性,對系統動態過程建模可忽略其影響。基于假設,可得到變換器的簡化電路模型如圖3所示,其中變壓器原邊漏感為Lr,變壓器勵磁電感為Lm,變壓器變比為NT,濾波電感電流記為iL,濾波電感電壓記為uL,變壓器原邊電流記為iLr。
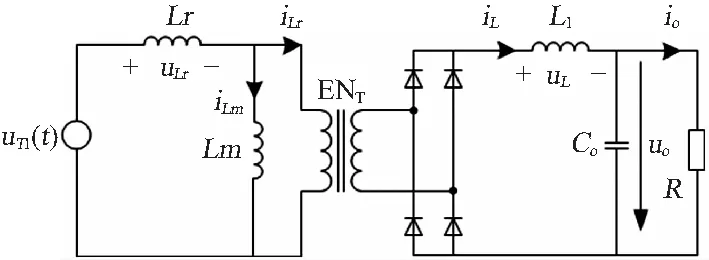
圖3 變換器簡化電路模型Fig.3 The simplified circuit model of the converter
2)CCM模式下變換器數學模型
基于CCM下系統模態分析,由狀態空間平均法可得系統的狀態空間平均方程為:
(1)

(2)
采用擾動法求解小信號模型為:
(3)
其中狀態矩陣、輸入和輸出矩陣分別為:
(4)
小信號模型框圖如圖4所示。
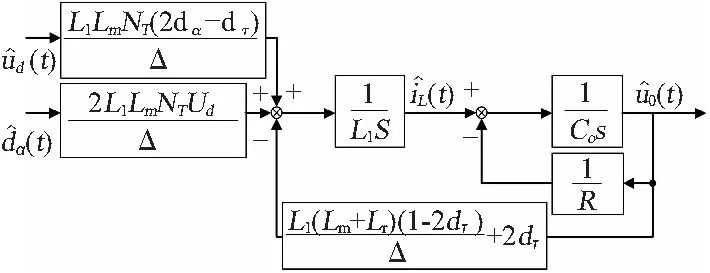
圖4 小信號模型系統框圖(CCM)Fig.4 The chart of the small signal model(CCM)
3)DCM模式下變換器數學模型
基于DCM下系統模態分析,由開關網絡平均法可得DCM模式下小信號模型為:
(5)
其中r2和k2為模型參數,根據負載輕重不同,DCM模式又可以分為DCM1模式和DCM2模式,具體的模型參數解析表達式為:
(6)
式(6)中dδ的表達式為:
(7)
小信號模型框圖如圖5所示。
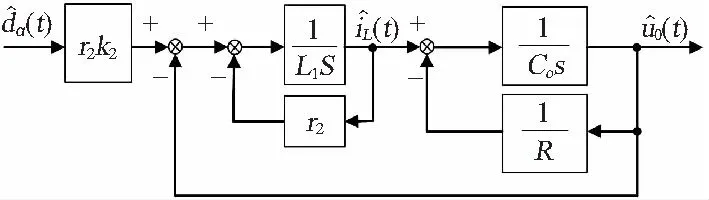
圖5 小信號模型系統框圖(DCM)Fig.5 The chart of the small signal model(DCM)
4)數學模型特性分析與驗證
為了分析變換器的動態特性和驗證小信號模型的正確性,基于仿真平臺Matlab/Simulink進行仿真研究。電路參數設為:Ud=4 000 V,Uo=710 V,Ts=1 ms,L1=250 μH,Co=5 mF,L2=50 μH,Lm=127.3 mH,Lr=51 μH,NT=0.263,dθ=0.42,dα=0.348。分別取R=9.601 4 Ω(7%負載,DCM模式),和R=0.672 1 Ω(100%負載,CCM模式)。
將電路參數代入仿真模型和數學模型,若仿真電路仿真計算得到的計算結果與數學模型計算得到的計算結果吻合,則驗證了小信號數學模型的正確性。對比仿真模型和數學模型的動態計算結果如圖6所示。 圖6(a)中,t=0.08 s時刻,移相占空比dα突加10%擾動,圖中所示輸出電壓uo的變化反映出CCM模式下小信號模型的動態響應和仿真模型的動態響應基本吻合;圖6(b)中,t=0.1 s時刻,dα突加10%擾動后uo的動態反映出DCM模式下小信號模型的正確性。
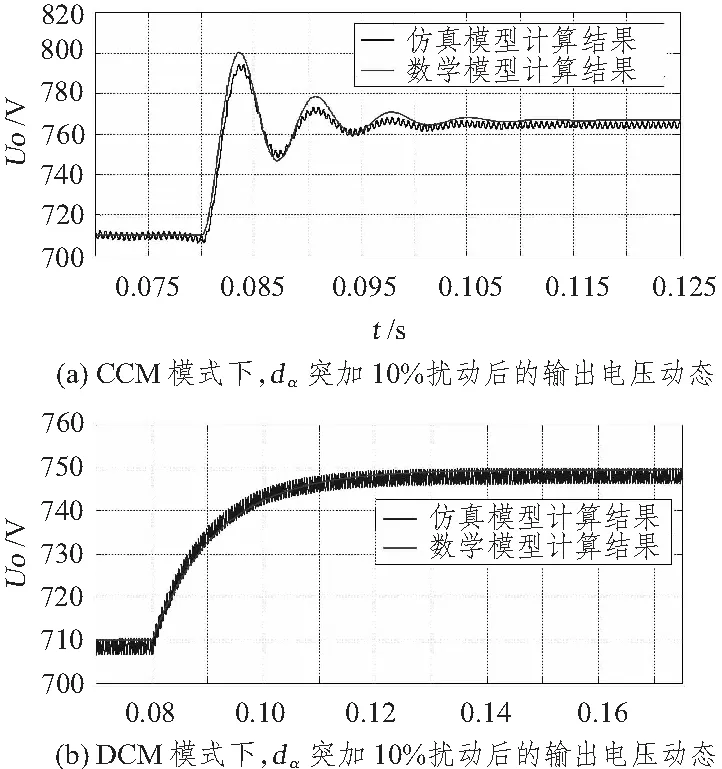
圖6 不同模式下小信號模型的驗證Fig.6 The verify of the small-signal models by simulation
如圖6所示及前述建模過程分析,變換器在CCM和DCM工作模式時的動態性能差別較大,CCM模式時的系統阻尼明顯小于DCM模式。基于其中任何一種模式設計的電流電壓雙閉環PI控制器都可能在另外一種工作模式下得不到較好的動態性能。即基于傳統方法設計的控制系統應對模式切換這種大擾動時控制性能較差。
3 PI自適應非線性控制策略
若能快速檢測出系統處于何種工作模式,則可以通過實時調整控制器參數來適應系統的動態擾動,所以提出一種基于CCM和DCM模式快速檢測的PI自適應控制器。
根據移相PWM調制原理和變換器的工作原理,可以設計控制器框圖如圖7所示。控制器以電壓電流雙閉環PI控制為基礎,輸入電壓參考指令為Uoref。考慮到變換器可能需要并聯運行,采用輸出阻抗法均分負載,設調差系數為KI,io經過下垂特性調整后,與Uoref相減得到最終電壓指令值,再與輸出電壓uo比較,送入電壓環PI自適應調節器運算,得到電感電流指令值ILref。ILref與iL比較后送入電流環PI自適應調節器運算,運算結果送入限流控制器。限流控制器的主要功能是利用滯環控制實現短路限流,限流控制器輸出移相控制信號dα,經過移相PWM調制器得到脈沖控制信號。其中電壓電流環PI自適應調節器的PI參數是根據CCM/DCM模式檢測來實時調整的。
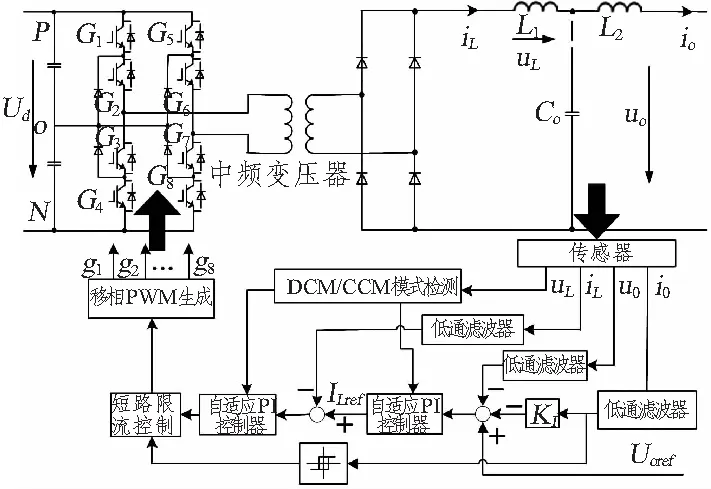
圖7 模式快速識別PI自適應非線性控制策略框圖Fig.7 The chart of Mode fast identification PI adaptive control method
4 基于電感電壓特征的模式快速辨識方法
要實現上述控制器功能,其關鍵在于能夠實現對CCM和DCM模式的快速識別,目前文獻中提出的方法中多數是基于檢測電感電流過零點,但實際工程中,由于傳感器存在零偏,尤其是在較大電流等級的傳感器,在小電流條件下誤差很大,幾乎不能采樣到電感電流過零點,同時比較電路也存在一定的誤差,加上采樣誤差等因素,出現誤檢測的概率很大。因此提出一種基于電感電壓特征快速識別CCM/DCM工作模式的檢測方案,模式判別流程如圖8所示,具體原理如圖9所示,其中ur所示為整流橋輸出。
當DCM模式切換至CCM模式時,電感電流由斷續變為連續,過零點消失,同時電感電壓的變化也存在明顯特征,即電感電壓最高電平持續時間明顯較CCM模式減少,而CCM模式下最高電平持續時間是固定的,具體如圖9中uL所示。利用這一特性,可設計如圖9所示的檢測電路,該檢測電路主要由外圍比較電路和FPGA構成。其中比較電路將電感電壓采樣信號和零比較后得到的Cp_uL信號送入FPGA,FPGA根據同步時鐘信號和PWMsyn同步邏輯信號對比較電路輸出信號進行計時,根據計時長短判斷出工作模式,輸出Mod信號。
若只考慮穩態,則Mod信號已能夠表征系統的工作模態,但是當系統受到諸如突加負載等大擾動時,Mod信號可能會發生連續變化,若Mod信號連續變化次數過多則可能導致系統輸出振蕩失穩。基于此考慮,在Mod信號生成后,送入模式信號多數表決強制穩定模塊,進行模式信號的強制穩定,最終得到的Mode信號即為送出FPGA的模式信號。

圖8 基于電感電壓特性模式判斷流程圖Fig.8 The flow scheme of mode identification based on inductance voltage
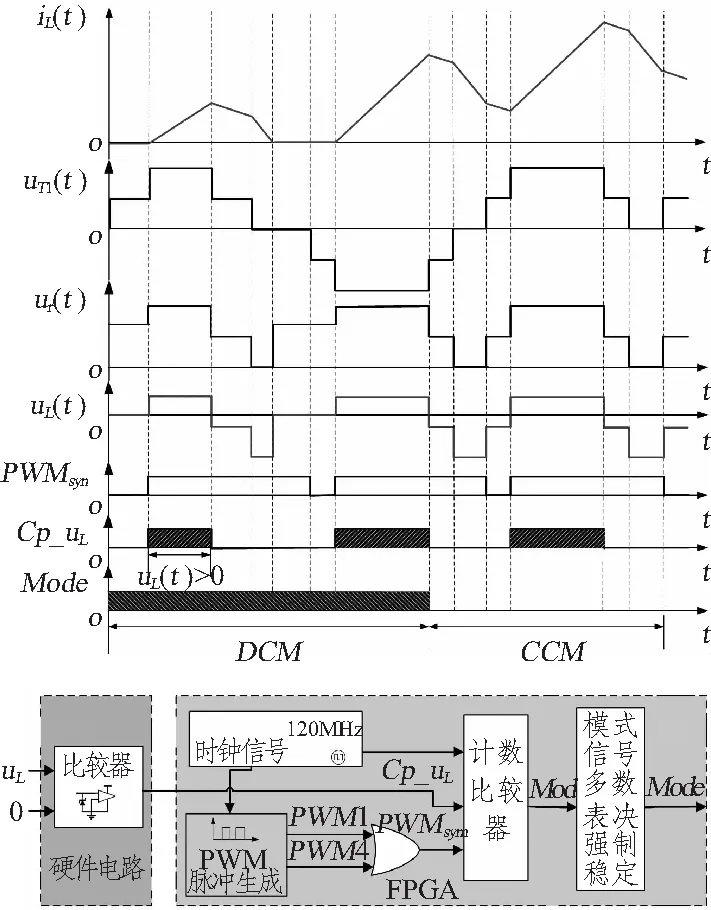
圖9 基于電感電壓特性的模式快速識別示意圖Fig.9 The sketch of CCM/DCM fast identification based on inductance voltage
5 實驗驗證
為了驗證前述對變換器工作原理的分析,以及基于CCM/DCM模式快速識別的PI自適應非線性控制策略的有效性,搭建原理樣機實驗平臺進行實驗。實驗原理樣機采用RTLAB實時仿真系統和FPGA作為控制算法實現的主體,RTALB是一種國際上比較流行的實時仿真工具,可以構建速控制原型(RCP),將控制器與實際的控制對象構成閉環回路對控制算法進行驗證[12-14]。
具體的實驗樣機參數為:Ud=500 V,Uo=166 V,Ts=1 ms,L1=2 mH,Co=420 μF,L2=0.4 mH,Lm=0.277 33 H,Lr=85 μH,NT=0.5。
圖10所示為傳統雙閉環PI控制和基于CCM/DCM模式快速識別的PI自適應非線性控制的動態性能對比,其中通道C1為輸出電壓uo波形(100 V/div),通道C2為Mode信號(0.5 V/div),通道C3為電感電壓uL波形(100 V/div),通道C4為PWMsyn信號(0.2 V/div)。圖10為突加5.17 Ω負載(50%負載)時系統的動態響應,從Mode信號變化可看出,基于電感電壓特征的模式檢測準確且速度較快。對比圖10(a)和圖10(b)中輸出電壓波形可得,采用傳統雙閉環PI控制,輸出電壓最大跌落為123 V,而采用本文提出的控制方法,則輸出電壓最大跌落為92 V,性能明顯優化。圖11所示為突加0.2838 Ω短路電阻時的短路限流控制波形,其中通道C1為輸出電壓uo(50 V/div),通道C3為移相控制輸出dα(0.25/div),通道F1為輸出電流io(134 A/div),從io波形可看出系統的短路限流控制功能得到驗證。
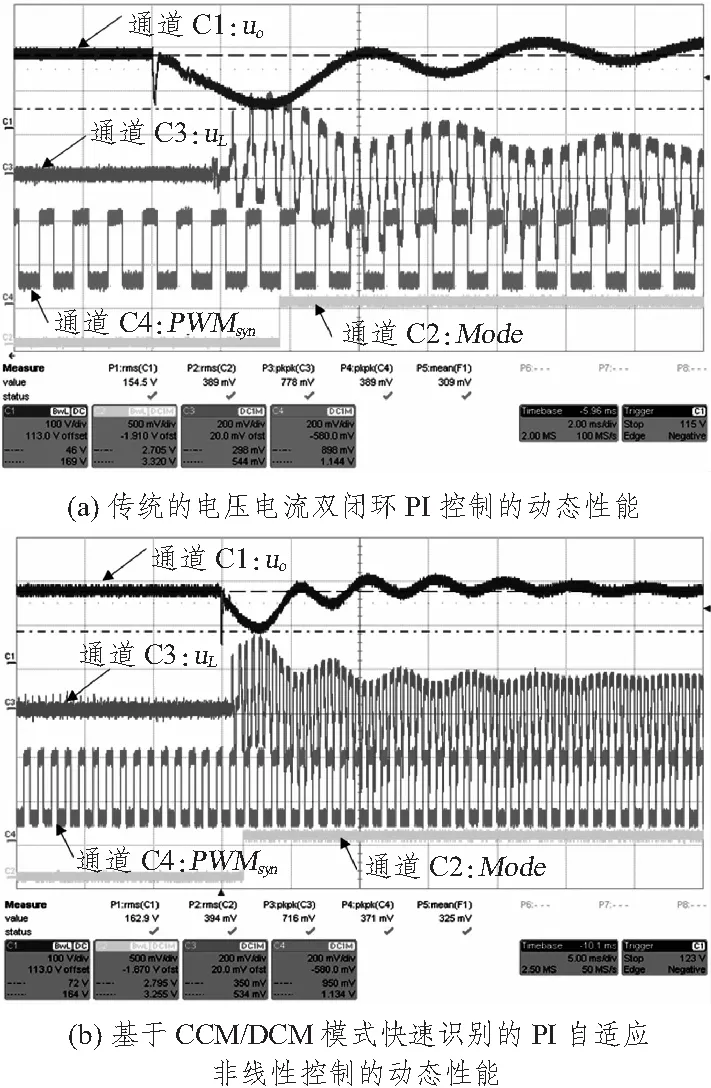
圖10 控制策略的實驗驗證(空載至50%負載)Fig.10 The verification of the control method by prototype (no load to 50% load)
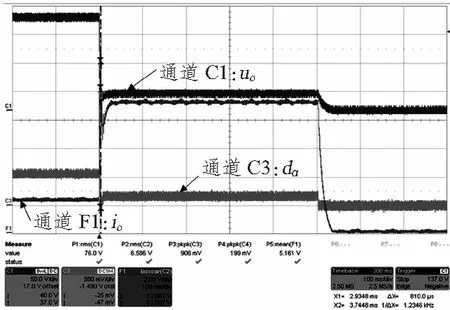
圖11 控制策略的實驗驗證(短路限流)Fig.11 The verification of the control method by prototype (current limited when short circuit)
6 結 語
本文分析一種帶隔離的三電平H橋直流變換器,通過對變換器數學模型研究發現其在不同工作模式下的動態性能差異較大,因此提出一種基于CCM/DCM模式快速識別的PI自適應非線性控制策略,通過實驗驗證,可得到以下結論:
1)本文提出的基于電感電壓特征快速識別CCM/DCM工作模式的方案,具有檢測快速,易于實現,外圍電路簡單,抗干擾能力強等優點,而且易于推廣到其他需要進行模式辨識的場合,例如兩電平直流電路,有源濾波電路等。
2)本文提出的基于模式快速識別的PI自適應控制策略較之傳統PI控制策略具有更優的控制性能,而且易于推廣到其他需要全模式運行的直流變換器。
[1] STEFFEN B.Recent developments of high power converters for industry and traction application[J].IEEE Transaction on Power Electronics,2000,15(6):1102-1117.
[2] 王建淵,王琦,鐘彥儒.一種用于三電平逆變器的雙模式過調制策略[J].電機與控制學報,2012,16(6):30-36.
WANG Jian-yuan,WANG Qi,ZHONG Yan-ru.One strategy of two-model over modulation for three-level inverter[J].Electric Machines and Control,2012,16(6):30-36.
[3] QIU Ying,CHEN Xi-you,LIU He-len.Digital average current-mode control using current estimation and capacitor charge balance principle for DC/DC converters operating in DCM[J].IEEE Transaction on Power Electronics,2010,25(6):1537-1545.
[4] SREENU K,RAY T.Nonlinear average current mode control for a DC/DC buck converter in continuous and discontinuous conduction modes[C].IEEE TENCON,Hyderabad,2008:1-6.
[5] 陳道煉,陳亦文,張靈改.差動Buck/Boost直流變換器型高頻環節逆變器[J].電機與控制學報,2010,14(11):13-19.
CHEN Dao-lian,CHEN Yi-wen,ZHANG Ling-gai.Differential buck/boost DC/DC converter mode inverter with high frequency link[J].Electric Machines and Control,2010,14(11):13-19.
[6] LIN Hung-chih,CHANG Tsin-yuan.Analysis and design of a sliding mode controller for buck converters operating in DCM with adaptive hysteresis band control scheme[C].IEEE 7th PEDS,Bangkok,2007:372-377.
[7] EGIZIANO L,FEMIA N,FORTUNATO M.Dynamic model of one-cycle control for converters operating in CCM and DCM[C].IEEE 32nd IECON,Paris,2006:2150-2155.
[8] WU Jian-hua,YANG Hai-tao,ZHANG Hai-xin.Model-free adaptive control for model mismatch power converters[C].IEEE CCDC,Mianyang China,2011:1168-1171.
[9] HADI K,KAMAL A.A novel averaged-model-based control of a SEPIC power factor corrector using the input/output feedback linearization technique[C].lEEE 36th PESC,Recife,2005:565-571.
[10] SHU F,ASHWIN K.A simple digital DCM control scheme for Boost PFC operating in both CCM and DCM[J].IEEE Transaction on Industry Applications,2011,47(4):1802-1812.
[11] JABER A,ABU Qahouq.Control scheme for sensorless operation and detection of CCM and DCM operation modes in synchronous switching power converters[J].IEEE Tran-saction on Power Electronics,2011,25(10):2489-2495.
[12] YE Xi.A PC-cluster based real-time simulator for all-electric ship integrated power systems analysis and optimization[C].IEEE ESTS,Arlington VA,2007:396-401.
[13] MESH S.PEBB based high-power hardware-in-loop simul-ation facility for electric power systems[C].IEEE Power Engineering Socirty General Meeting,Montreal Que,2006:1-3.
[14] REN W,QIAN L,LIU Y.Real time digital simulations augmenting the development of functional reconfiguration of PEBB and universal controller[C].IEEE American Control Conference,Portland of USA,2005:2005-2010.
Mode fast identification PI adaptive control strategy for DC/DC converter
FAN Xue-xin,MA Wei-ming,XIE Zhen,XIAO Fei,JI Feng
(National Key Laboratory for Vessel Integrated Power System Technology,Naval University of Engineering,Wuhan 430033,China)
The good dynamic performance can be hardly reached with traditional PI controller when the three-level H-bridge DC/DC converter meets the large disturbance of the changing between Continuous Conduction Mode(CCM) and Discontinuous Conduction Mode(DCM). Aiming at it, a new PI adaptive non-linear control strategy based on mode fast identification had been proposed. The small signal models had been built in CCM and DCM with average state space method and average switched network method, and the controller was designed. The controller extracted the mode characters from the inductance voltage, and sent the mode information in less than a switching period. The mode identification method was much faster and more correctness than the method based on the inductance current. Therefore, the PI parameters could be instantaneous changed by mode signal to achieve the best dynamic property. The experiment results show that the new controller has the better performance compare to the conventional one. And the output voltage droop reduce 25.2% compare to the common PI controller. So, the operation principle and analyze result of the control strategy is verified at last.
three-level h-bridge;continuous conduction mode;discontinuous conduction mode;adaptive control
2013-05-31;
2013-06-20
國家自然科學基金資助項目(50977090, 51277178)
范學鑫(1977-),男,博士,研究方向為電力系統分析與控制。
TM46
A
1672-7649(2014)03-0007-06
10.3404/j.issn.1672-7649.2014.03.002
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
電子制作(2018年11期)2018-08-04 03:25:42
光學精密工程(2016年6期)2016-11-07 09:07:19