基于隨機(jī)蕨的實(shí)時(shí)車輛匹配
2014-08-06 11:26:50楊晨暉劉守達(dá)王子明郭義凡
楊晨暉,劉守達(dá),王子明,郭義凡,李 輝
(廈門大學(xué)信息科學(xué)與技術(shù)學(xué)院,福建 廈門 361005)
車輛匹配是智能交通系統(tǒng)的重要組成部分,其在停車場(chǎng)智能管理、道路監(jiān)控、高速路自動(dòng)收費(fèi)等方面有著廣泛的應(yīng)用前景.
基于特征的匹配算法按照描述方式的不同,目前主要分為兩大類,一類是用于處理邊緣、角點(diǎn)等局部特征的強(qiáng)特征描述,目前使用最廣泛的是尺度不變特征(SIFT)算法,其主要思想最初是由David Lowe提出[1].目前已經(jīng)有很多研究人員在SIFT算法的基礎(chǔ)之上對(duì)算法進(jìn)行了改進(jìn)和完善.主要有2004年Ke等[2]提出的PCA-SIFT算法[2];2006年Bay等[3]提出快速SIFT(SURF)算法.2009年Yu提出仿射尺度不變特征變換(ASIFT)算法[4];另一類是以提取自然特征點(diǎn)的方式將特征的匹配轉(zhuǎn)化為多類別分類問(wèn)題.其中最具代表的是Lepetit等[5]提出的隨機(jī)樹(shù)特征匹配算法,將寬基線特征匹配問(wèn)題轉(zhuǎn)化為分類問(wèn)題.隨機(jī)樹(shù)特征匹配算子不需要強(qiáng)特征描述.將計(jì)算量大的工作轉(zhuǎn)移到訓(xùn)練階段,利用基準(zhǔn)圖像上以穩(wěn)定特征點(diǎn)為中心的鄰域塊作為訓(xùn)練樣本,并用隨機(jī)樹(shù)分類器對(duì)其進(jìn)行分類.在線階段則用訓(xùn)練好的分類器對(duì)待匹配圖像上檢測(cè)到的特征點(diǎn)鄰域塊進(jìn)行分類,從而達(dá)到匹配的目的.該類算法需要離線訓(xùn)練,因此限制了其應(yīng)用場(chǎng)景,但是在條件允許其進(jìn)行離線訓(xùn)練的情形下,該類算法在在線運(yùn)行階段能夠快速準(zhǔn)確甚至實(shí)時(shí)地進(jìn)行匹配,因此其也得到了廣泛的應(yīng)用.
本文在前人研究的基礎(chǔ)上,將隨機(jī)蕨引入到車臉匹配領(lǐng)域中.隨機(jī)蕨算法由Lepetit等[6]最早提出,是對(duì)基于隨機(jī)樹(shù)算法的進(jìn)一步改進(jìn).將隨機(jī)樹(shù)的層次結(jié)構(gòu)特征改為了非層次結(jié)構(gòu)特征.隨機(jī)蕨將寬基線圖像匹配轉(zhuǎn)化為機(jī)器學(xué)習(xí)技術(shù)問(wèn)題,將運(yùn)算量較大的特征匹配部分轉(zhuǎn)移到分類器訓(xùn)練中.本文研究基于隨機(jī)蕨的車輛匹配方法,并克服傳統(tǒng)匹配速度慢的特點(diǎn),從而實(shí)現(xiàn)對(duì)車輛準(zhǔn)確、實(shí)時(shí)的匹配.
1 快速車臉定位
車輛大部分顯著特征的“車臉”的概念,即車輛在多尺度、多視角下具有特征不變性的區(qū)域.在交通場(chǎng)景中相對(duì)于復(fù)雜的背景,車輛上的特征點(diǎn)顯得較少,背景上的特征點(diǎn)將很大程度上的干擾到車輛匹配效果,并且使匹配過(guò)程更加費(fèi)時(shí).本章首先對(duì)車輛可疑區(qū)域以及車牌區(qū)域的定位,并在此基礎(chǔ)上,結(jié)合先驗(yàn)知識(shí),很好地對(duì)“車臉”進(jìn)行定位;最后給出了“車臉”的實(shí)驗(yàn)結(jié)果,并對(duì)其進(jìn)行了分析.
1.1 車輛可疑區(qū)域確定
要進(jìn)行車輛區(qū)域確定,可以先通過(guò)背景差分將所有非背景的前景目標(biāo)分割出來(lái),然后進(jìn)行閾值化處理,獲得二值化的差分圖,并通過(guò)Canny算子獲得車輛的邊緣,最后通有效性分析確定車輛可疑區(qū)域(如圖1).
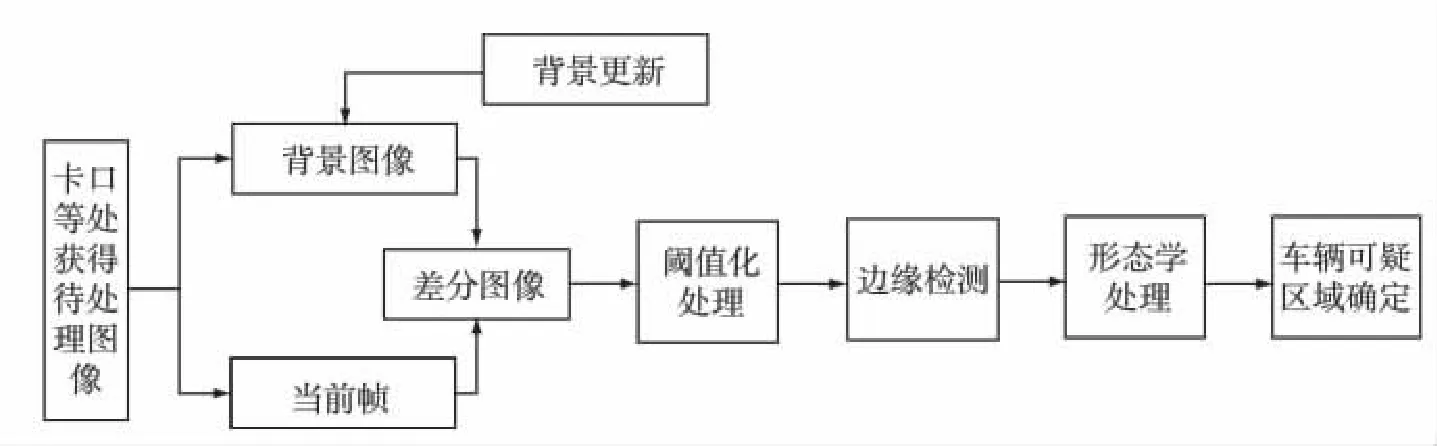
圖1 車輛可疑區(qū)域定位流程圖Fig.1 Interest region of vehicle extraction
1.2 快速車牌定位
首先對(duì)圖像進(jìn)行預(yù)處理,主要包括彩色圖像灰度化和圖像局部增強(qiáng)以及豎直邊緣提取和背景曲線與噪聲濾除.本文采用Zheng等[7]提出的三次掃描法濾除背景曲線和噪聲.然后,利用滑動(dòng)窗口法對(duì)車牌進(jìn)行初定位.最后利用水平掃描法[8]對(duì)候選車牌圖像區(qū)域進(jìn)行逐行掃描進(jìn)行細(xì)定位.
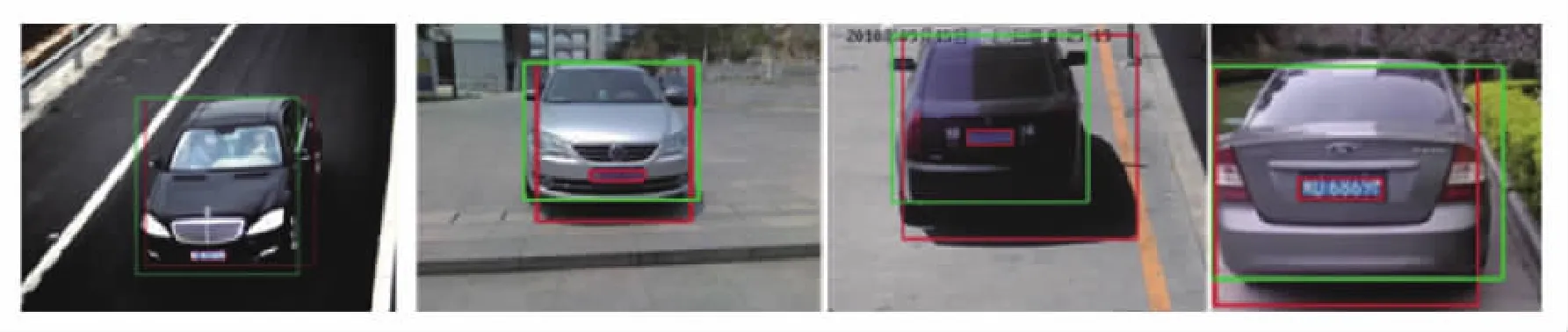
圖中,車牌定位結(jié)果用紅色小矩形標(biāo)出,車輛可疑區(qū)域用綠色矩形標(biāo)出.結(jié)合車牌定位和車輛可疑區(qū)域定位結(jié)果,得到車輛位置,使用紅色矩形標(biāo)出.圖2 車臉定位結(jié)果Fig.2 Cars face location
1.3 車臉定位
設(shè)檢測(cè)到的車輛區(qū)域的左右邊界離車牌的左右邊界的距離分別為l1和l2,則取車臉的左右邊界分別為min(l1,l2)加上車牌的左右邊界.同時(shí)考慮到車輛可疑區(qū)域提取時(shí)在邊緣提取時(shí)可能會(huì)使車輛的真實(shí)區(qū)域內(nèi)縮,因此將獲取的車臉的左右邊界向兩邊擴(kuò)展1/4個(gè)車牌寬度(如圖2).
2 基于隨機(jī)蕨的實(shí)時(shí)車輛匹配
為了能對(duì)提取特征點(diǎn)進(jìn)行快速匹配,采用同隨機(jī)樹(shù)特征匹配算法[6]類似的基于隨機(jī)蕨的特征匹配算法,將寬基線圖像匹配轉(zhuǎn)化為機(jī)器學(xué)習(xí)技術(shù)問(wèn)題將運(yùn)算量較大的特征匹配部分轉(zhuǎn)移到分類器訓(xùn)練中.離線階段,建立并訓(xùn)練隨機(jī)蕨分類器,在線階段,將檢測(cè)到的特征點(diǎn)進(jìn)行分類,獲取粗匹配結(jié)果,然后用改進(jìn)的順序抽樣一致性(PROSAC)算法去除誤匹配.并通過(guò)實(shí)驗(yàn)說(shuō)明,本文的算法能夠很好地進(jìn)行實(shí)時(shí)車輛匹配.
2.1 快速多尺度特征點(diǎn)提取
車輛圖片平坦部分較多,導(dǎo)致特征點(diǎn)數(shù)目較少,同時(shí)為了使檢測(cè)到的特征點(diǎn)具有尺度不變性,建立多尺度金字塔,分別對(duì)每個(gè)尺度尋找其顯著特征點(diǎn).這樣即能使檢測(cè)到的特征點(diǎn)滿足尺度不變的特性,又能解決車輛區(qū)域較平坦、檢測(cè)到的特征點(diǎn)較少的缺點(diǎn).同時(shí)其算法運(yùn)行時(shí)間也不會(huì)提升很大,還是能夠很好地滿足實(shí)時(shí)的要求.對(duì)不同尺寸的多幅圖片進(jìn)行實(shí)驗(yàn),得到實(shí)驗(yàn)結(jié)果如表1.
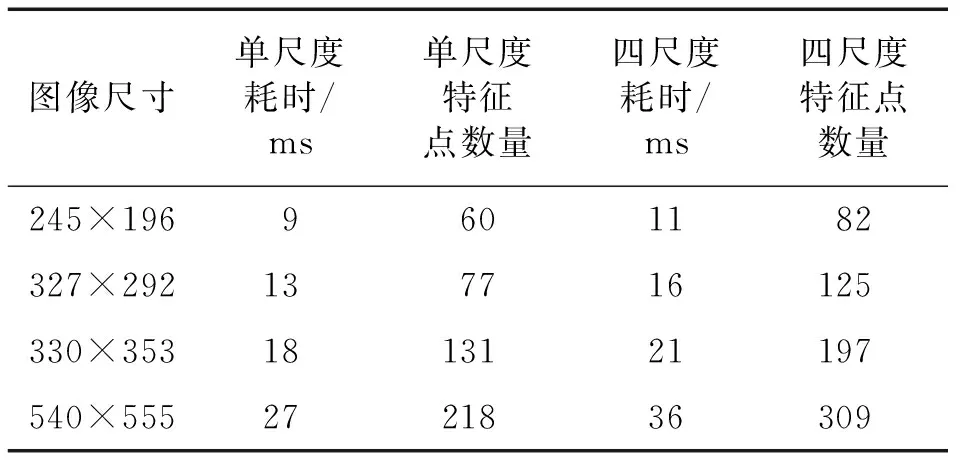
表1 多尺度耗時(shí)分析Tab.1 Multi-scale time-consuming analysis
2.2 隨機(jī)蕨算法
隨機(jī)蕨算法由Lepetit等[6]最早提出,是對(duì)基于隨機(jī)樹(shù)算法的進(jìn)一步改進(jìn).將隨機(jī)樹(shù)的層次結(jié)構(gòu)特征改為非層次結(jié)構(gòu)特征,如圖3所示,將隨機(jī)樹(shù)的每層結(jié)點(diǎn)選取相同的決策,則樹(shù)結(jié)構(gòu)可以轉(zhuǎn)化為結(jié)構(gòu)相對(duì)單一的蕨結(jié)構(gòu).
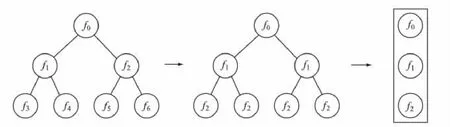
圖3 隨機(jī)蕨結(jié)構(gòu)Fig.3 The structure of random ferns
基于隨機(jī)蕨的樸素貝葉斯分類器的基本思想和基于隨機(jī)樹(shù)的特征識(shí)別匹配類似,可以把基準(zhǔn)圖像描述為H個(gè)顯著特征點(diǎn),并為這H個(gè)顯著的特征點(diǎn)建立一個(gè)數(shù)據(jù)集K={k1,…,kH},同時(shí)將每個(gè)特征點(diǎn)k及以其為中心的鄰域塊p(k)可能出現(xiàn)的各種形式作為一類ci,i=1,…,H.在運(yùn)行階段,對(duì)輸入圖像每個(gè)特征點(diǎn)kinput及以其為中心的鄰域塊p(kinput),判斷它是否屬于H個(gè)特征點(diǎn)中的一個(gè)類ci.
設(shè)fj,j=1,…,N為特征點(diǎn)鄰域塊p(kinput)產(chǎn)生的二元特征集,令p(kinput)的尺寸為L(zhǎng)×L(一般取L=32),則fj取決于鄰域塊p(kinput)中在隨機(jī)生成的兩像素位置dj1和dj2的灰度值Idj1和Idj2的大小,這些隨機(jī)位置在分類器訓(xùn)練時(shí)生成,并用在離線訓(xùn)練與在線運(yùn)行階段,即
(1)
p(kinput)所屬的類別可以定義為
(2)
式中C表示類別,式(2)可由貝葉斯公式轉(zhuǎn)化為
P(C=ci|f1,f2,…,fN)=
(3)
因?yàn)橄闰?yàn)概率P(C)為均勻分布,且公式(3)分母部分與類別無(wú)關(guān),所以式(2)可以化為
(4)
由于fj之間的獨(dú)立性,
(5)
為了降低存儲(chǔ)量并保證fj之間的相關(guān)性,用半樸素貝葉斯分類器來(lái)代替樸素貝葉斯分類器.將fj分為M組,每組包含S=N/M個(gè)二元特征,在半樸素貝葉斯模型下,可以認(rèn)為不同組的二元特征之間相互獨(dú)立,而同組內(nèi)二元特征之間具有相關(guān)性,同時(shí)可以將這些組定義為蕨特征.則公式(3)中可以轉(zhuǎn)化為

(6)
式中Fm=[fσ(m,1),fσ(m,2),…,fσ(m,S)],m=1,…,M表示第m個(gè)蕨,fσ(m,j)表示范圍為1,…,N的隨機(jī)數(shù).由此可知p(kinput)的所屬類別為
(7)
2.3 訓(xùn) 練
對(duì)基準(zhǔn)圖像進(jìn)行一系列的操作來(lái)合成虛擬的特征圖像樣本集合.可以在基準(zhǔn)圖像I0上提取特征點(diǎn)及其周圍(32×32)像素的鄰域塊,對(duì)其進(jìn)行仿射變換獲得訓(xùn)練集Btrain.
隨機(jī)產(chǎn)生Ntotal幅虛擬圖像,并將這些圖像Ii中檢測(cè)到的特征點(diǎn)對(duì)應(yīng)到基準(zhǔn)圖像I0中,并記錄特征點(diǎn)k在虛擬圖像中被檢測(cè)到的次數(shù),即可求得特征點(diǎn)k的被檢測(cè)概率為
(8)
式中Ndetected為特征點(diǎn)k在虛擬圖像中被檢測(cè)到的次數(shù).因此,可以取概率P(k)最高的H個(gè)特征點(diǎn)作為基準(zhǔn)圖像的穩(wěn)定特征點(diǎn),并將其作為分類器的初始類進(jìn)行分類訓(xùn)練,即各特征點(diǎn)及其鄰域塊所屬的類為ci,i=1,…,H,實(shí)驗(yàn)中取H=400.
由以上兩步,可以求得訓(xùn)練圖像Btrain和分類器的初始類ci之后,對(duì)每個(gè)訓(xùn)練圖像在L×L(取L=32)范圍內(nèi),按照隨機(jī)選取M×S(M=30,S=12)對(duì)像素位置dj1和dj2.對(duì)每個(gè)初始類ci根據(jù)這M×S對(duì)隨機(jī)位置上像素點(diǎn)的灰度值由式(1)計(jì)算類ci的M個(gè)隨機(jī)蕨中S個(gè)二元特征fi的值,并根據(jù)這個(gè)值計(jì)算出式(7)中的每個(gè)隨機(jī)蕨Fm和類ci的類條件概率P(Fm|C=ci).
2.4 在線特征點(diǎn)檢測(cè)與匹配
在線檢測(cè)階段我們首先用快速多尺度特征點(diǎn)提取的方法提取前景車輛的特征點(diǎn).由于檢測(cè)到的特征點(diǎn)不再用在分類器的建立上,非車輛上的特征點(diǎn)也可以快速的用分類器進(jìn)行分類匹配.因此在線檢測(cè)階段不用進(jìn)行車臉定位,而只要對(duì)背景差分提取的前景車輛進(jìn)行檢測(cè)即可.

2.5 改進(jìn)的PROSAC誤匹配特征對(duì)的剔除
確定了要配準(zhǔn)的2幅圖像的對(duì)應(yīng)點(diǎn)后,利用這些對(duì)應(yīng)點(diǎn)對(duì),以1幅圖像為參考,求解出2幅圖像之間的幾何變換矩陣H的參數(shù),并由此來(lái)去除誤匹配.為此可以采用隨機(jī)抽樣一致性(RANSAC)算法來(lái)去除誤匹配.然而,當(dāng)誤匹配特征對(duì)的數(shù)目在總的匹配特征對(duì)中所占的比例過(guò)大時(shí),RANSAC算法不能很好地處理這種情況.由于隨機(jī)蕨的圖像匹配算法沒(méi)有直接對(duì)誤匹配對(duì)去除的策略,在2幅圖像間差距較大時(shí),誤匹配對(duì)占總匹配對(duì)的比例可能會(huì)較大,所以在此時(shí)會(huì)失效.
可以采用PROSAC算法來(lái)進(jìn)行模型擬合,剔除誤匹配特征對(duì),PROSAC算法由Chum等[9]于2005年提出,該方法優(yōu)先從高品質(zhì)方程的數(shù)據(jù)子集中抽取樣本,即選取那些屬于正確匹配概率高的樣本,有利于迭代過(guò)程的快速收斂,能夠很好地應(yīng)對(duì)誤匹配所占總匹配比例較大時(shí)的情形.
而在內(nèi)點(diǎn)集合的應(yīng)用上,由于PROSAC算法在初期就能迅速找到全部由內(nèi)點(diǎn)組成的樣本,所以我們可以對(duì)PROSAC算法進(jìn)行改進(jìn),交替從內(nèi)點(diǎn)集中和有序的樣本集中選擇樣本點(diǎn).改進(jìn)的PROSAC算法如下:
t=0,n=m,n*=N重復(fù),直到找到解:
1) 選擇假定的集合
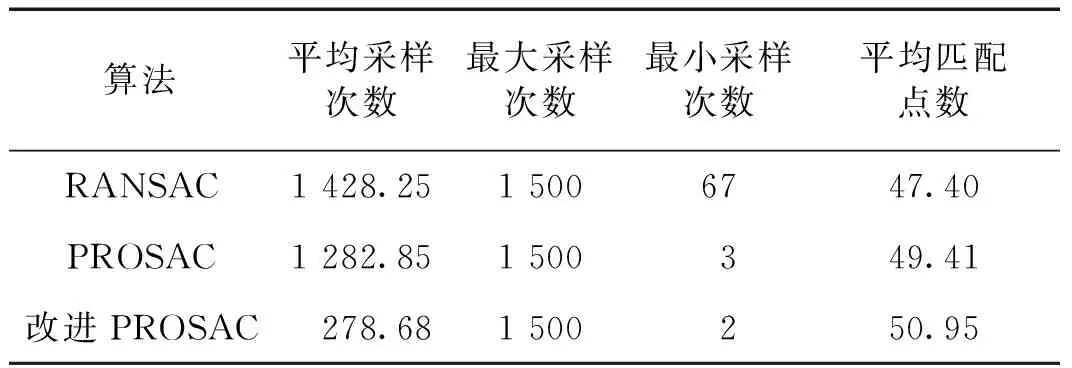
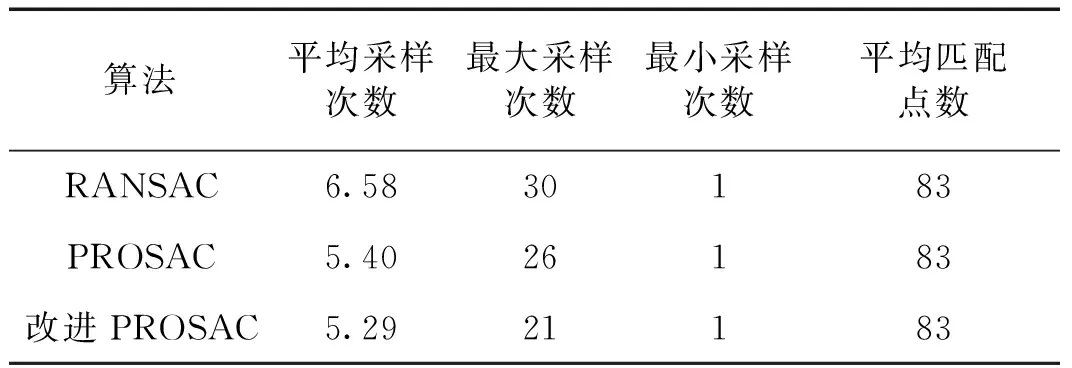
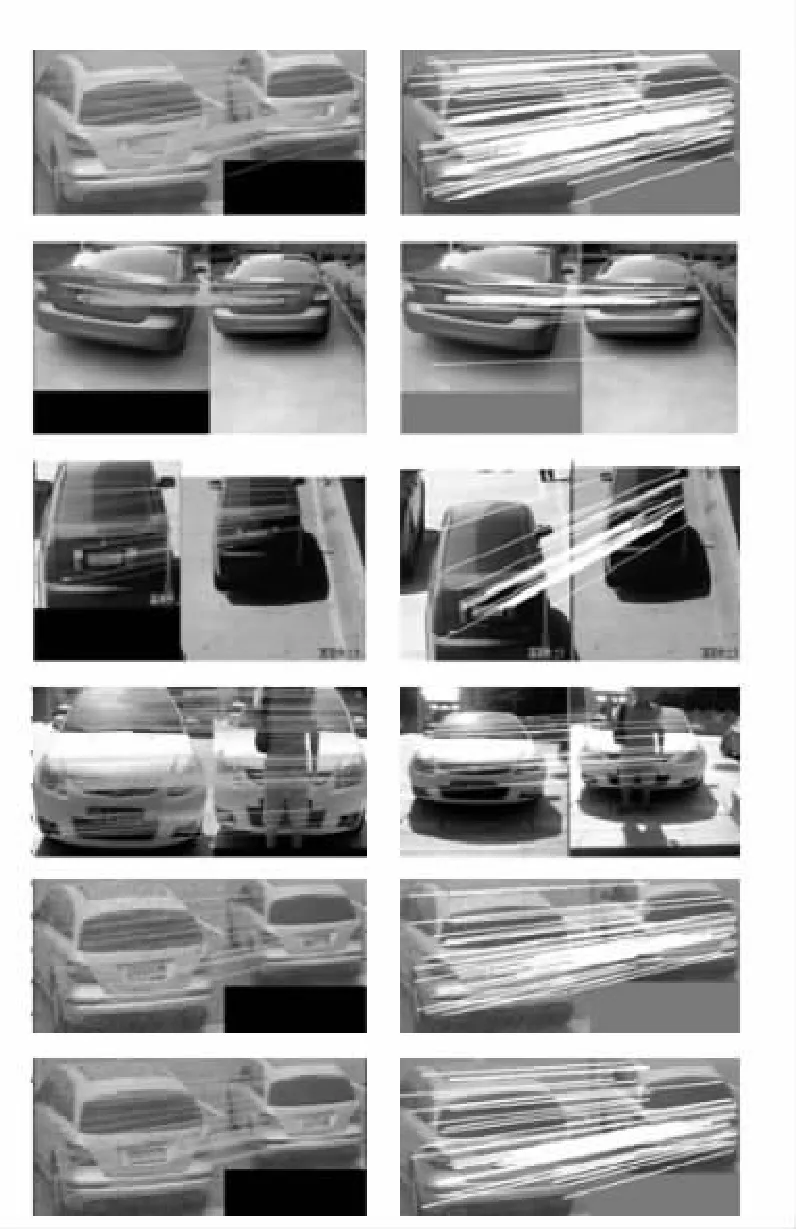
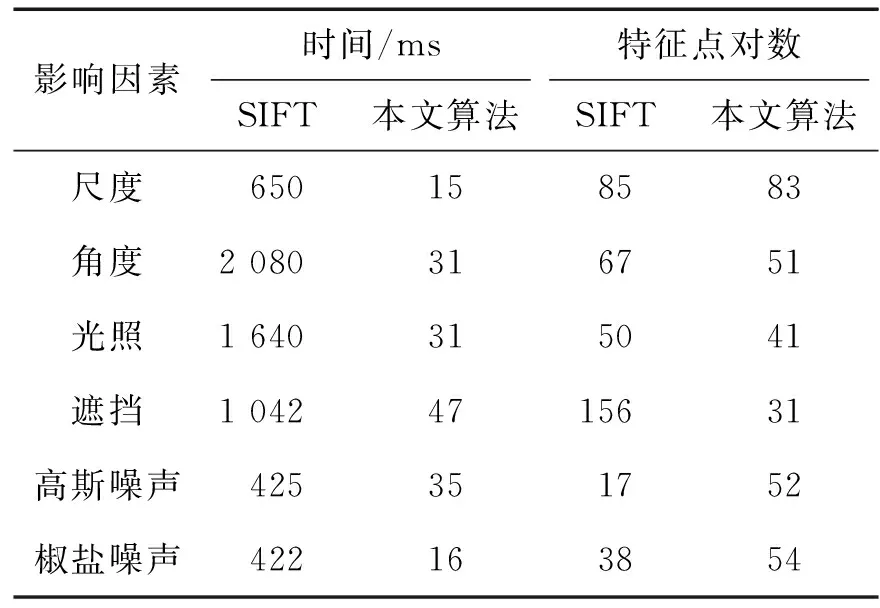
如果n 2) 大小為m的半隨機(jī)樣本Mt 交替進(jìn)行(i),(ii): (i)a從Bik(當(dāng)前內(nèi)點(diǎn)集合)中隨機(jī)選擇大小為m的隨機(jī)樣本, (ii)b隨機(jī)從Un中選取m個(gè)點(diǎn); 3) 模型參數(shù)估計(jì) 從樣本Mt中計(jì)算模型參數(shù)pt; 4) 模型驗(yàn)證 找到參數(shù)為pt的模型的支持(例如一致的數(shù)據(jù)點(diǎn)),如果支持?jǐn)?shù)目大于當(dāng)前最大支持?jǐn)?shù),則更新當(dāng)前所得內(nèi)點(diǎn)集合Bik. 對(duì)下面2幅圖進(jìn)行匹配并比較結(jié)果,其中實(shí)驗(yàn)時(shí)最大迭代次數(shù)為1 500次,并且當(dāng)內(nèi)點(diǎn)集中的個(gè)數(shù)大于50時(shí)則退出循環(huán),實(shí)驗(yàn)結(jié)果如圖4所示. 圖4 粗匹配結(jié)果Fig.4 Initial match result 與RANSAC和PROSAC對(duì)比,結(jié)果如表2和表3所示. 表2 誤匹配較多時(shí),各算法比較Tab.2 More mismatch situation,comparison of the algorithm 注:運(yùn)行程序100次取平均值. 由實(shí)驗(yàn)可知,改進(jìn)后的PROSAC能夠很好的處理誤匹配點(diǎn)較多,和較少時(shí)的情形,能夠減少迭代次數(shù),從而減少運(yùn)行時(shí)間. 表3 誤匹配較少時(shí),各算法比較Tab.3 Less mismatch situation, comparison of the algorithms 注:運(yùn)行程序100次取平均值. 首先對(duì)一段含有339幀的視頻進(jìn)行測(cè)試,每幀圖片的大小為600×800像素,匹配結(jié)果為264幀匹配成功,75幀匹配失敗.在DEBUG模式下耗時(shí)26 487 ms,平均每次匹配耗時(shí)78.13 ms,其中每幀檢測(cè)特征點(diǎn)耗時(shí)平均為34.56 ms,匹配時(shí)間為43.57 ms;在RELEASE模式下耗時(shí)10 698 ms,平均每次匹配耗時(shí)31.56 ms,其中每幀檢測(cè)特征點(diǎn)耗時(shí)平均為18.23 ms,匹配時(shí)間為13.33 ms.分析可知,我們的匹配可以達(dá)到實(shí)時(shí)的要求.接著在尺寸、角度、光照、遮擋、噪聲等干擾情況下對(duì)本文的算法與SIFT進(jìn)行比較.為了公平,在SIFT算法進(jìn)行匹配時(shí)將“車臉”區(qū)域提前截取出來(lái),作為基準(zhǔn)圖像,同時(shí)將算法總耗時(shí)減去基準(zhǔn)圖像檢測(cè)特征點(diǎn)的時(shí)間作為SIFT的匹配時(shí)間,實(shí)驗(yàn)結(jié)果如圖5和表4所示. 左邊圖像是使用SIFT匹配的結(jié)果,右邊是使用本文算法匹配結(jié)果.從上到下,分別是在不同的尺度、角度、光照、遮擋、高斯噪聲、椒鹽噪聲條件下的比較.圖5 匹配結(jié)果對(duì)比Fig.5 Comparison of matches 通過(guò)以上實(shí)驗(yàn)說(shuō)明,本文算法在保證實(shí)時(shí)處理車輛匹配的同時(shí),能夠很好地處理尺寸、角度、亮度變化,以及遮擋、噪聲等影響.在檢測(cè)到的匹配對(duì)和SIFT差不多的同時(shí),誤匹配較少,匹配正確率接近100%.在時(shí)間上、性能上都比SIFT算法有大幅度提高. 本文結(jié)合車輛區(qū)域定位與車牌快速定位來(lái)對(duì)包含車輛大部分顯著特征的“車臉”區(qū)域進(jìn)行定位.用隨機(jī)蕨思想將車輛匹配問(wèn)題轉(zhuǎn)化為分類問(wèn)題,將運(yùn)算量大的部分轉(zhuǎn)移到分類器訓(xùn)練過(guò)程中.同時(shí)結(jié)合車輛圖片的特征,引入多尺度的概念,提出了一種快速多尺度特征點(diǎn)檢測(cè)算法.離線訓(xùn)練階段,產(chǎn)生大量的虛擬圖對(duì)分類器進(jìn)行訓(xùn)練,在線運(yùn)行階段檢測(cè)特征點(diǎn)并將這些特征點(diǎn)所在的區(qū)域塊放到分類器中進(jìn)行快速分類,產(chǎn)生初始匹配.對(duì)誤匹配的特征點(diǎn)進(jìn)行精確匹配時(shí),分析了RANSAC策略的不足,應(yīng)用改進(jìn)的PROSAC對(duì)隨機(jī)蕨匹配算法獲取的匹配對(duì)進(jìn)行精確匹配. 表4 本文算法與SIFT算法對(duì)比結(jié)果Tab.4 Comparison between SIFT and the algorithm of this paper 實(shí)驗(yàn)結(jié)果表明,基于隨機(jī)蕨的車輛匹配能夠快速實(shí)時(shí)地進(jìn)行匹配,同時(shí)能夠很好地應(yīng)對(duì)車輛尺度變化、角度變化、亮度變化、遮擋、鏡頭畸變以及復(fù)雜的交通環(huán)境等挑戰(zhàn). 本文旨在實(shí)現(xiàn)車輛的實(shí)時(shí)匹配,結(jié)合車輛區(qū)域定位與車牌定位來(lái)實(shí)現(xiàn)“車臉”定位,同時(shí)引入隨機(jī)蕨的思想將車輛匹配問(wèn)題轉(zhuǎn)化為特征點(diǎn)所在區(qū)域的分類問(wèn)題,雖然能夠?qū)囕v進(jìn)行實(shí)時(shí)匹配,但仍然存在著一些不足和需要改進(jìn)的地方,需要進(jìn)一步的完善和提高: 1) 本文的隨機(jī)蕨分類器是建立在“車臉”特征點(diǎn)之上的,提取的“車臉”區(qū)域的準(zhǔn)確性,將直接影響著后面的匹配效果.因此如何快速準(zhǔn)確的提取“車臉”區(qū)域,還需要進(jìn)一步的研究. 2) 離線訓(xùn)練階段需要生產(chǎn)大量的虛擬圖像進(jìn)行穩(wěn)定特征點(diǎn)查找和分類器的建立,因此需要大量的計(jì)算.然而由于虛擬圖像之間、隨機(jī)蕨之間的相互獨(dú)立,可以利用多核編程來(lái)降低離線訓(xùn)練時(shí)間,提高運(yùn)算效率. 3) 本文的車輛匹配不能很好地處理同品牌同型號(hào)的車輛.當(dāng)兩輛車是同一品牌同一型號(hào)時(shí),單靠本文匹配方法不能很好地進(jìn)行區(qū)分,需要車牌識(shí)別進(jìn)行輔助. 4) 匹配依賴于分類器的分類結(jié)果,缺少誤匹配去除機(jī)制,在誤匹配很多時(shí),可能會(huì)產(chǎn)生匹配失敗的情形.因此如何快速有效地去除誤匹配將是今后研究工作的重點(diǎn). [1] Lowe D G.Object recognition from local scale-invariant features[C]∥Computer Vision,1999.The Proceedings of the Seventh IEEE International Conference on.Kerkyra:IEEE,1999:1150-1157. [2] Ke Y,Sukthankar R.PCA-SIFT:a more distinctive representation for local image descriptors[C]∥Proceedings of IEEE International Conference on Computer Vision and Pattern Recognition.Washington:IEEE,2004:511-517. [3] Bay H,Tuytelaars T,Gool L V.SURF:speeded up robust features[C]∥Computer Vision-ECCV 2006.Berlin:Springer-Verlag,2006:404-417. [4] Morel J M,Yu G S.ASIFT:a new framework for fully affine invariant image comparison[J].Society for Industrial and Applied Mathematics Journal on Image Sciences,2009,2(2):438-469. [5] Lepetit V,F(xiàn)ua P.Keypoint recognition using randomized tree[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2006,28(9):1465-1479. [6] Ozuysal M,Calonder M,Lepeti V.Fast keypoint recognition using random ferns [J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2010,32(3):448-461. [7] Zheng D N,Zhao Y N,Wang J X.An efficient method of license plate location[J].Pattern Recognition Letters,2005,26(15):2431-2438. [8] Parisi R,Di Claudio E D,Lucarelli G,et al.Car plate recognition by neural networks and image processing[C]∥Proceedings of the 1998 IEEE International Symposium on Circuits and Systems.Monterey,CA:IEEE,1998:195-198. [9] Chum O,Matas J.Matching with PROSAC-progressive sample consensus[C]∥Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition.San Diego,CA:IEEE,2005:220-226.
3 實(shí)驗(yàn)結(jié)果與分析
4 結(jié) 論
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52
