機器人焊接復雜焊縫的仿真
2014-08-06 04:34:46彭燦燦李鈺楨岳海瑞楊錦輝朱曉軍薛家祥
電焊機 2014年4期
彭燦燦 ,李鈺楨 ,岳海瑞 ,楊錦輝 ,朱曉軍 ,薛家祥
(1.華南理工大學機械與汽車工程學院,廣東 廣州 510640;2.中國能源建設集團 廣東火電工程總公司,廣東 廣州 510735)
0 前言
在工業高速發展的今天,為了提高焊接效率、改善焊接質量,焊接機器人獲得了廣泛的運用。復雜焊縫的焊接往往要求機器人有更高的自由度。但同時,自由度越高,對于機器人的控制就越難。對高自由度機器人實現精確控制的研究顯得尤為有必要。本研究通過Pro/E建立了具有六自由度的焊接機器人的三維模型,運用MATLAB對機器人進行運動仿真控制,能夠實現機器人按精確的指定焊接路線進行焊接,實現了對復雜焊縫焊接的需要[1-3]。
1 焊接機器人參數化建模
研究對象是PUMA系列焊接機器人,外形如圖1所示。該系列機器人為六自由度機器人,可以到達允許空間范圍內的任何區域。
Pro/E軟件系統是美國參數化技術公司PTC的優秀產品,它提供了集成產品的三維模型設計、加工、分析及繪圖等功能的完整的CAD/CAE/CAM解決方案。首先是運用Pro/E對機器人進行參數化建模。通過參數化建模,用戶可以調用PTC公司的開放的功能函數,結合Visual Studio 2005進行二次開發,實現對模型參數的快捷調整。
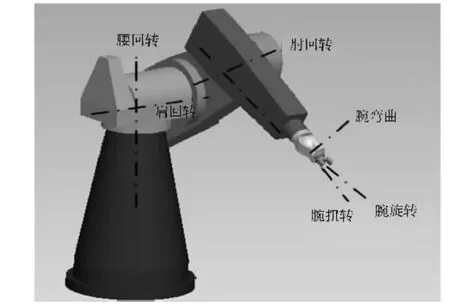
圖1 PUMA機器人
1.1 Pro/E中建立機器人的三維模型
根據PUMA機器人的實際尺寸,在Pro/E中建立各機器人各關節模型,并完成裝配,圖2為在Pro/E下裝配好的機器人的三維模型。
圖2 Pro/E下建立的機器人的三維模型
1.2 對機器人模型進行二次開發
設定機器人主要關節的可變參數,如圖3所示。運用visual studio2005進行二次開發[4-5],在Pro/E菜單欄添加下拉菜單,并彈出MFC對話框,通過對話框命令對主要關節的參數進行改動,并顯示機器人的空間工作范圍,如圖4所示。
Pro/E二次開發界面可以實現對機器人的導入、對機器人主要關節參數的改動、展示機器人的工作空間范圍(見圖5)以及在MATLAB中進行運動仿真控制。
2 D-H參數法建立機器人空間運動方程
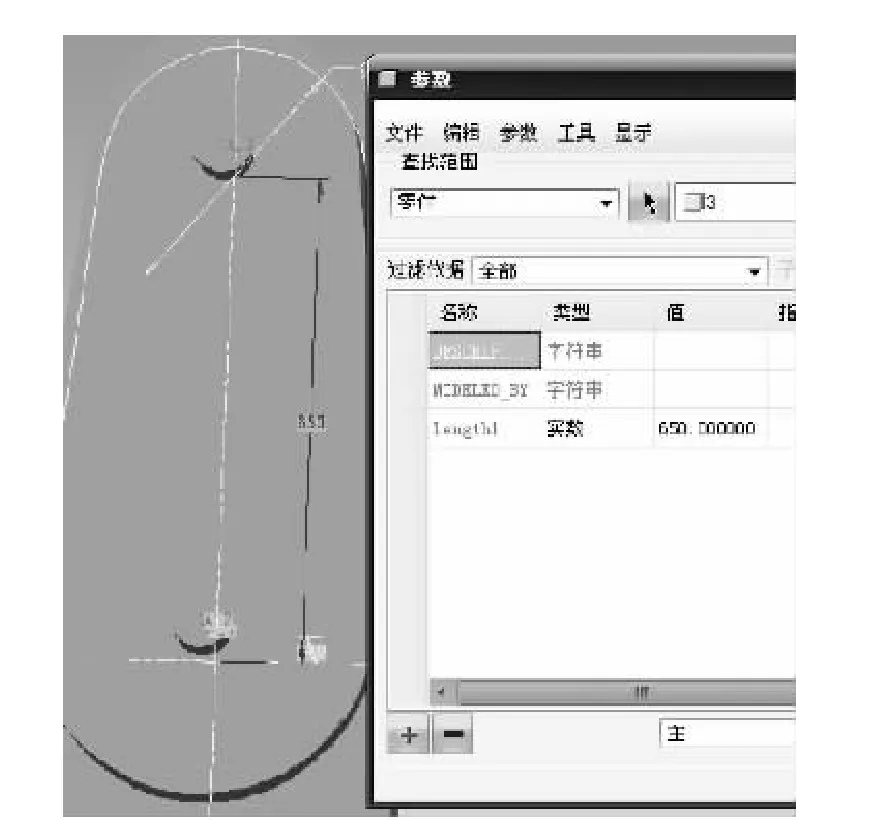
圖3 機器人主要關節添加控制參數
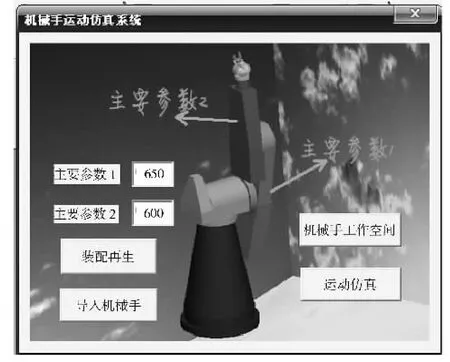
圖4 Pro/E二次開發的控制界面
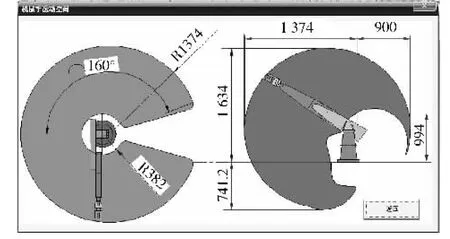
圖5 機器人工作空間范圍
機器人的運動是由各個關節角的轉動控制的,通常情況下都是要求機器人按照一定的軌跡從一個位置運動到另一個位置。機器人通過控制各個關節角的度數來控制機器人手部的空間位置。對機器人的位姿描述通過D-H參數法來實現。空間坐標系如圖6所示。
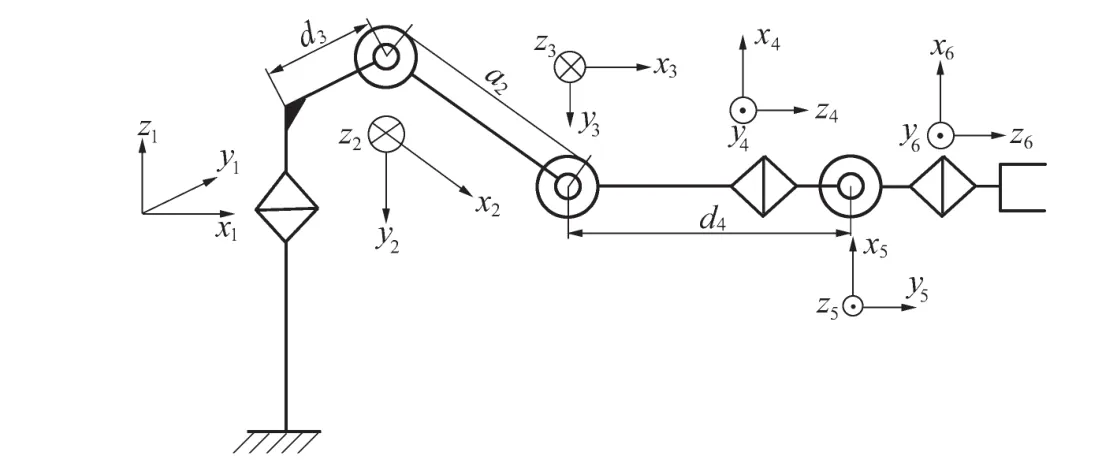
圖6 機器人各關節空間坐標系
2.1 機器人關節參數分析
在構建的桿件坐標系基礎上,按照D-H方法確定的連桿參數,見表1。機器人的偏置和連桿長度中除d4=600 mm,d3=190 mm,a2=650 mm外,其余均為零。其連桿扭角為:φ2=φ4=φ6=-90°,φ1=φ3=0,φ5=90°。需要說明的是:對于運動鏈兩端,按照習慣約定:φ0=φ6=0;a0=a6=0。因為關節6是轉動關節,因此規定H6=0為連桿6的零位,習慣約定d6=0。另外,參數的設定隨坐標系設定的改變而改變。
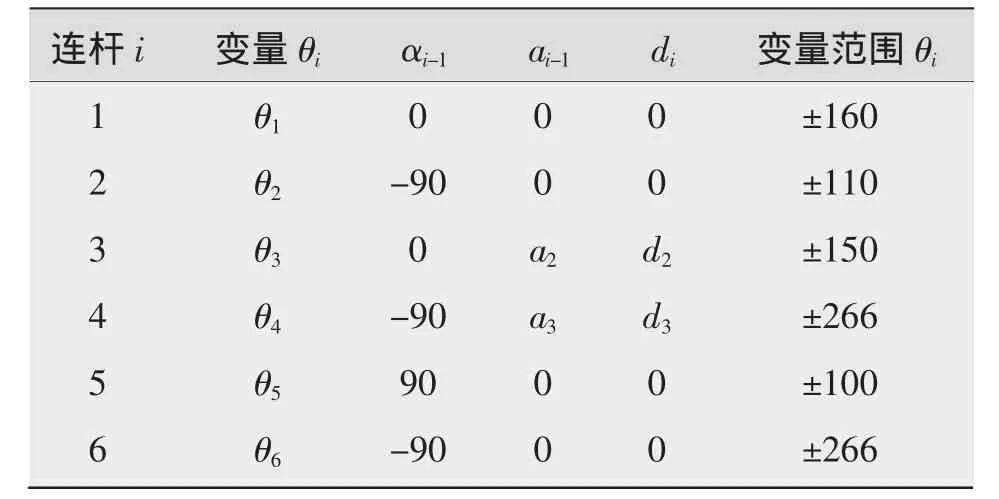
表1 機器人關節參數
2.2 機器人運動學逆解
建立機器人空間運動學逆解,需要運用D-H參數法[6-7]對機器人空間位姿進行描述。建立空間坐標系
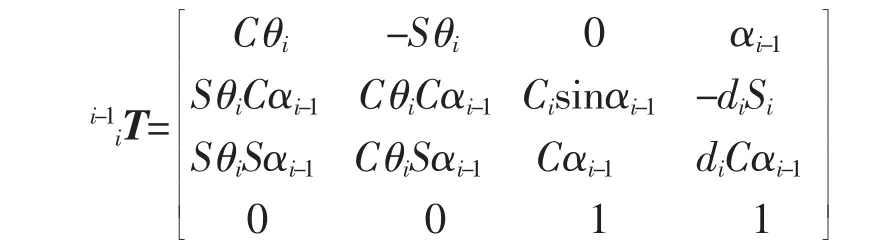
對機器人末端,也就是焊槍末端的位姿描述極為
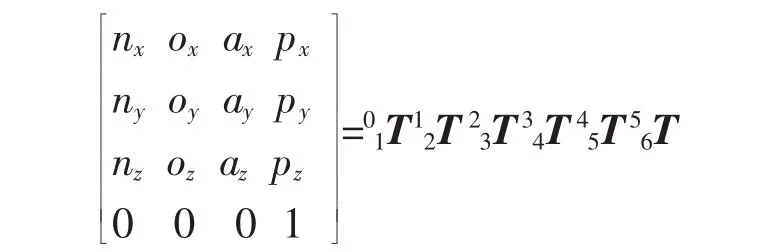
式中 左邊矩陣中各元素都是已知的,右邊六個矩陣是未知的,與關節變量φ1~φ6有關。反變換法就是用未知矩陣的逆變換逐次左乘上述矩陣方程,以便將關節變量分離出來,從而解出關節變量。機器人相鄰連桿間的坐標變換矩陣的逆矩陣表示為
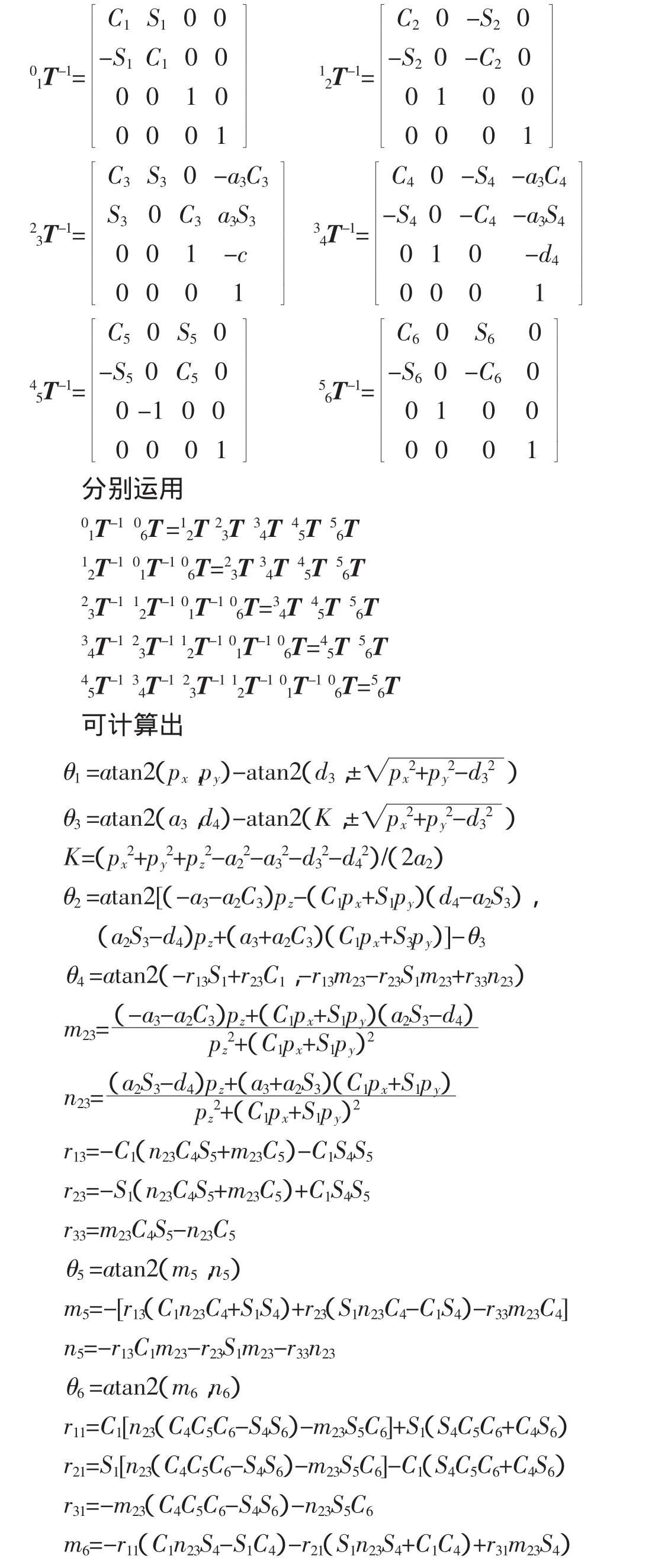

上式即為機器人空間運動逆解 φ1,φ2,φ3,φ4,φ5,φ6。
3 機器人運動仿真的實現
3.1 MATLAB中生成仿真控制界面
機器人控制部分在MATLAB中實現,本研究將在Pro/E中建立的機器人模型轉換為由坐標點組成的矩陣,通過編寫的函數將模型讀進MATLAB中編寫的GUI界面中,并通過求解的機器人運動學逆解結果驅動機器人實現仿真運動[8]。GUI界面效果如圖7所示。
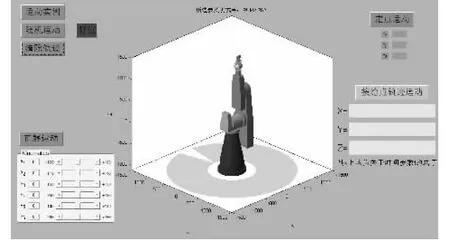
圖7 GUI界面效果
3.2 仿真控制效果
運用MATLAB強大的數據處理能力,實現了實時地將焊槍末端位姿進行逆解,得到實時的φ1,φ2,φ3,φ4,φ5,φ6。通過這些關節夾角驅動機器人進行運動,實現焊槍末端按指定的軌跡送絲。焊槍末端在給定的軌跡下運動的效果如圖8所示。
4 結論
運用Pro/E二次開發平臺,搭建了焊接機器人的運動仿真平臺。采用參數化建模,實現在不同機器人參數條件下對焊槍末端運動控制的的研究。同時,將Pro/E中建立的三維模型導入到MATLAB,充分運用MATLAB的數據運算處理能力,精確實現焊接機器人對復雜焊縫焊接的要求,用戶通過輸入焊縫空間軌跡,焊槍就能按照指定的焊接軌跡運行、送絲,界面具有良好的交互性。運用Pro/E對機器人進行參數化建模以及二次開發,運用D-H參數對機器人進行空間位姿描述,運用MATLAB進行機器人運動學逆解、建立MATLAB交互GUI界面,對研究使用焊接機器人焊接復雜焊縫的控制算法,實現對焊接機器人的精確、快捷控制有很好的借鑒意義。
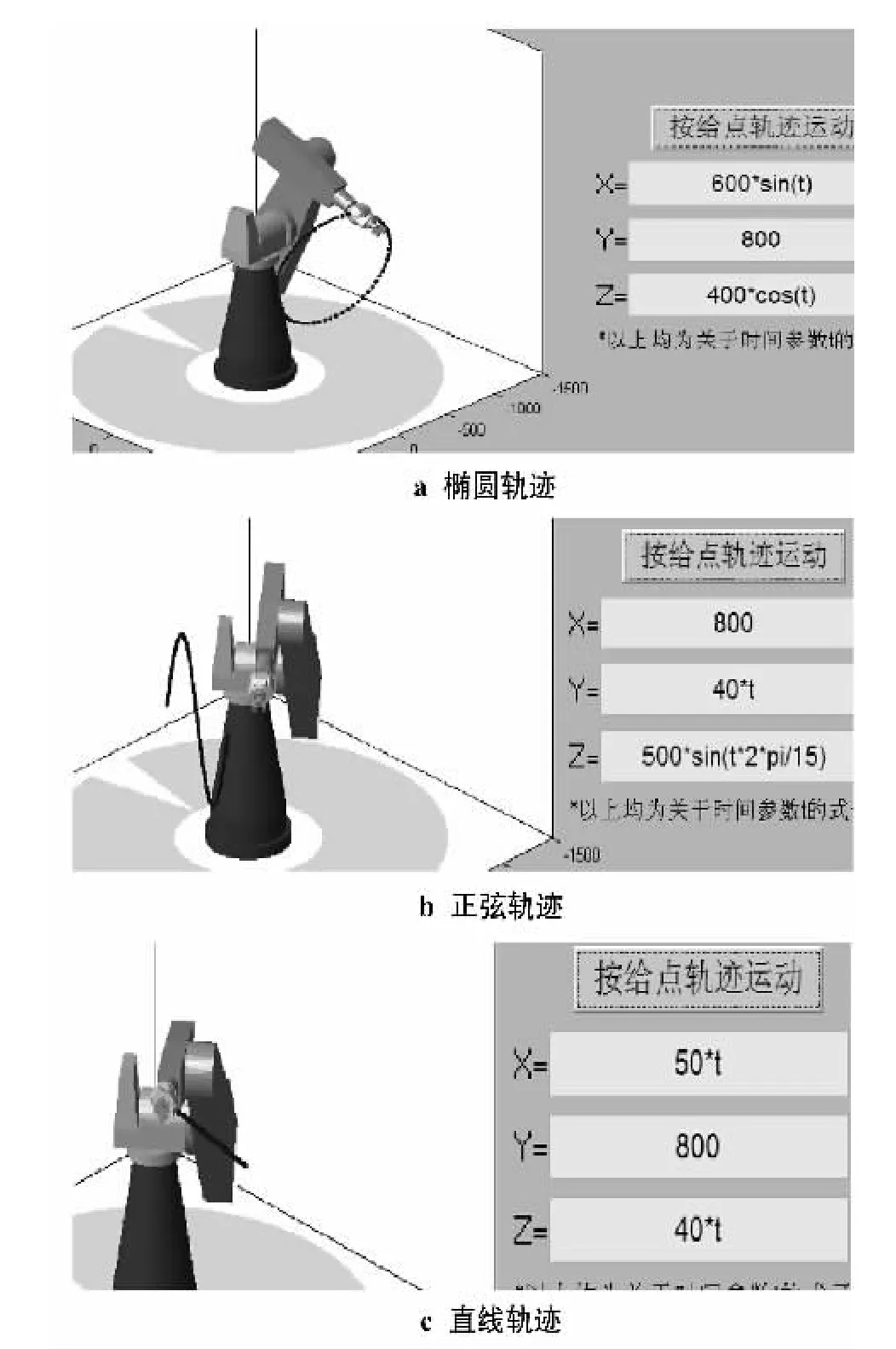
圖8 焊槍末端按給定軌跡運動效果
[1]楊叔子.工業機器人[M].武漢:華中科技大學出版社,2009.
[2]譚一炯,周方明,王江超,等.焊接機器人技術現狀與發展趨勢[J].電焊機,2006,36(3):6-10.
[3]張龍華.焊接機器人在現代工業生產中的應用[J].電焊機,2009,39(4):21-26.
[4]吳 焱.基于Pro/E二次開發平臺的旋渦泵葉輪參數化模型設計[J].科技經濟市場,2013(3):15-16.
[5]梅啟元.Pro/E軟件定制開發實現分析[J].電子機械工程,2013(1):60-64.
[6]李憲華,郭永存,張 軍,等.模塊化六自由度機械臂逆運動學解算與驗證[J].農業機械學報,2013(4):246-251.
[7]孫學儉,王仙勇,董 宇.焊接機器人運動學正反解[J].北京石油化工學院學報,2011,19(1):30-34.
[8]Don Rile y,cad2matdemo.m.Matlab Central[OE/OP].http://www.mathworks.c n/matlabcentral/fileexchang e/3642-cad2matdemom,2003.
猜你喜歡
建材發展導向(2021年6期)2021-06-09 05:57:08
當代陜西(2020年13期)2020-08-24 08:22:02
甘肅科技(2020年20期)2020-04-13 00:30:02
金屬加工(熱加工)(2020年12期)2020-02-06 05:59:00
模具制造(2019年3期)2019-06-06 02:11:02
制造技術與機床(2017年5期)2018-01-19 02:49:17
制造技術與機床(2017年11期)2017-12-18 06:47:29
制造業自動化(2017年2期)2017-03-20 14:26:13
濰坊學院學報(2016年2期)2016-12-01 13:00:11
新聞傳播(2015年11期)2015-07-18 11:15:04