基于偽降階磁鏈觀測器的速度辨識方法
2014-08-08 11:42:48吳曉新張笠君
電機與控制應用 2014年8期
柳 巍, 阮 毅, 吳曉新, 張笠君
(上海大學 機電工程與自動化學院,上海 200072)
0 引 言
磁場定向控制的概念被廣泛應用于高性能感應電機控制。在感應電機驅動系統(tǒng)中,為了獲得速度信息,需要一個速度傳感器,如測速發(fā)電機、旋轉變壓器、數字位置編碼器等。在交流傳動領域,已提出基于磁場定向的無速度傳感器方案,主要通過軟件算法代替硬件得到電機速度[1- 4]。
文獻[3]和文獻[4]提出了一種自適應全階磁鏈觀測器方案,用于估計轉子磁通和電機速度。速度自適應率主要是采用Popov和Lyapunov穩(wěn)定性方法來實現。由于全階磁鏈觀測器的反饋增益矩陣與電機的運行速度有關,實現比較復雜。如果采用開環(huán)的全階磁鏈觀測器,即增益矩陣設置為零,則電機在低速情況下會出現不穩(wěn)定的現象,在重載情況下會出現較大的速度誤差[5]。文獻[5]提出了一種基于自適應偽降階磁鏈觀測器的速度辨識方法,利用Lyapunov方法進行速度辨識,在中、高速范圍,偽降階磁鏈觀測器的性能相比全階磁鏈觀測器有了一定的改善。Lyapunov方法需要確定適當的Lyapunov函數,該函數的確定非常困難。文獻[6]利用Popov方法代替Lyapunov方法用于速度辨識。由于文獻[5]和文獻[6]都是在觀測磁鏈和實際磁鏈相等的假設條件下,得到觀測器的極點與電機轉速無關,所以系統(tǒng)的穩(wěn)定性還有待進一步研究。
本文研究了一種自適應偽降階磁鏈觀測器,反饋增益矩陣設計簡單,與電機轉速無關。比常見的全階磁鏈觀測器簡單,因此需要的計算時間更少,有利于數字實現。對該方法進行了仿真和試驗驗證,從低速到高速范圍,電機都能穩(wěn)定運行,克服了低速不穩(wěn)定的問題,證明了該方法的有效性。
1 異步電機及偽降階觀測器模型
在兩相靜止坐標系,將定子電流和轉子磁鏈作為狀態(tài)變量,則異步電機模型的狀態(tài)方程可表示為
(1)
(2)
式中:ωr——轉速;
τr——轉子時間常數;
Lm——互感;
Ls、Lr——定、轉子電感;
σ——漏感系數;


將定子電流觀測誤差ei作為反饋量,則偽降階自適應觀測器如圖1所示。ei通過誤差反饋增益矩陣G構成漸進狀態(tài)觀測器,并通過自適應機制對轉速進行估計。以is和ψr為狀態(tài)變量構建的異步電機偽降階閉環(huán)觀測器可表示為
(3)
(4)
式中: G——反饋增益矩陣,G的值為了確保觀測器的穩(wěn)定性。
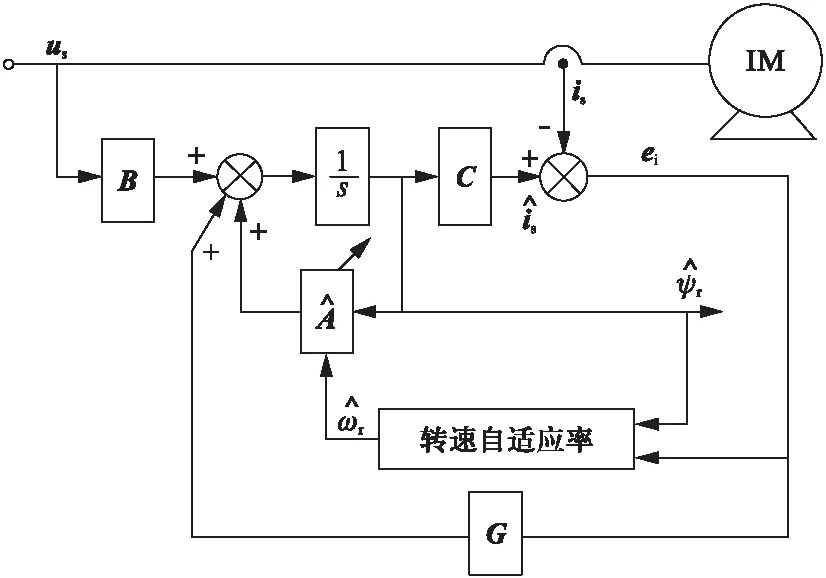
圖1 偽降階自適應觀測器
2 速度辨識及反饋矩陣設計
2.1 速度辨識
式(3)和式(4)中,如果將轉速認為是變化的參數,將電機模型減去觀測器模型,可以得到靜止坐標系下的狀態(tài)觀測誤差方程

(5)

根據式(5),誤差方程可以等價為非線性反饋系統(tǒng)。該系統(tǒng)由一個線性定常前向通道和一個非線性時變反饋通道組成,狀態(tài)觀測誤差框圖如圖2所示。
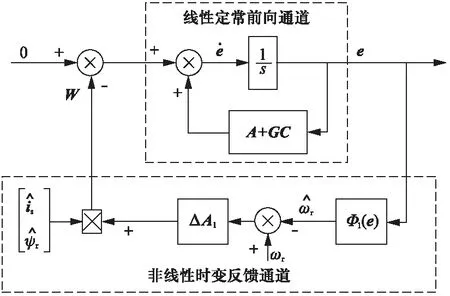
圖2 狀態(tài)觀測誤差框圖
圖2中,Φ1(e)是轉子轉速的自適應辨識函數。根據Popov超穩(wěn)定性理論,一個由線性前向通道和一個非線性時變反饋通道組成的系統(tǒng),如果其非線性反饋部分滿足Popov不等式,那么該系統(tǒng)處于漸進穩(wěn)定的充分必要條件是線性前向通道的傳遞函數嚴格正實。假設圖2中線性定常前向通道為嚴格正實,只要選取適當的自適應律,使非線性反饋部分滿足Popov不等式(6),即可保證系統(tǒng)漸進穩(wěn)定。

(6)
文獻[4]給出了詳細證明,如果電機轉速辨識滿足式(7),則滿足Popov不等式。

(7)
式中:Kp、Ki——比例、積分系數。
2.2 反饋矩陣設計
PI自適應律可以保證非線性反饋部分滿足Popov不等式,則該轉速估算系統(tǒng)的穩(wěn)定性只由線性前向通道的傳遞函數G(s)的嚴格正實性決定。首先求出前向通道傳遞函數矩陣G(s)的表達式,將式(5)在S域展開為
(8)

展開可得

(10)
化簡,得

(11)

(12)
其中:
y=-g2-ωr
如果前向通道傳遞函數矩陣G(s)嚴格正實,則必須滿足式(13)。
G(jω)+G*(jω)>0 ?ω>0
(13)
其中,G*(jω)是G(jω)的共扼轉置矩陣,將式(12)帶入上式中可得

(14)
其中:
B(s)= ss*(s+s*)I+2ss*xI+ (s+s*)mI+(s*-s)nJ
(15)
可得當且僅當以下條件成立時,式(13)才成立。
B(s)>0
(16)
將s=jωe代入式(16),ωe為同步角頻率,式(16)展開,可得
(17)
由式(17)可得保證前向通道傳遞函數矩陣嚴格正實的條件為
(18)
式(18)化簡可得
(19)
將式(19)中的ωc稱為臨界頻率,具體定義為
(20)
式(19)即為保證基于偽降階磁鏈觀測器轉速估算系統(tǒng)的線性前向通道傳遞函數G(s)嚴格正實的約束條件,也即保證轉速估算系統(tǒng)滿足Popov超穩(wěn)定性定理的約束條件。
由穩(wěn)定約束條件式(19)和式(20)可知,臨界頻率與偽降階磁鏈觀測器的反饋增益矩陣相關,臨界頻率越小,則不穩(wěn)定區(qū)域也會越小;若將臨界頻率設計為0,則可將不穩(wěn)定區(qū)域收縮到最小,所以反饋矩陣的設計準則是
(22)
簡化得
(23)
式(23)即為保證系統(tǒng)穩(wěn)定的反饋增益矩陣的設計準則。根據該準則,可以將反饋矩陣設計為
(24)
由式(24)可知,反饋增益矩陣設計簡單,與電機轉速無關。
3 仿真驗證
為驗證基于偽降階磁鏈觀測器的轉速辨識算法的有效性,在MATLAB環(huán)境下搭建了仿真模型。仿真模型中電機參數與實際電機相同,參數如下:PN=3kW,f=50Hz,IN=6.9A,n=1400r/min,Te=20N·m,Rs=1.85Ω,Rr=2.658Ω,Ls=0.2940 H,Lr=0.2898H,Lm=0.2838H,np=2。
電機正反轉運行時的仿真結果如圖3所示。在0s時給定轉速為750r/min;1.5s時,給定轉速變?yōu)?750r/min。從圖3中可知,觀測轉速很好地跟蹤實際轉速,轉速響應速度快,電流和磁鏈的跟蹤性能很好,穩(wěn)定后保持正弦變化。
低速時,電機帶額定發(fā)電性負載的運行結果如圖4所示。在1s時突加額定發(fā)電性負載,電機轉速波動后又保持在100r/min,轉矩電流分量響應速度快,沒有出現不穩(wěn)定現象,轉速觀測系統(tǒng)保持穩(wěn)定。



圖3 正反轉運行波形

圖4 100r/min時,突加額定發(fā)電性負載運行波形
4 試驗結果
為了進一步驗證本文提出的方法的有效性,通過試驗進行了驗證。主電路采用IGBT模塊構成一個三相電壓源逆變器,開關頻率為4kHz,控制系統(tǒng)以dsPIC30F6010A為控制核心,采用矢量控制策略。為了比較觀測性能,通過一個光電編碼器來檢測電機的實際轉速。
電機轉速給定為額定轉速1400r/min時,實際電機轉速和觀測電機轉速的波形如圖5所示。電機轉速給定為125r/min時,實際電機轉速和觀測電機轉速的波形如圖6所示。從圖6可知,不管是在高速還是在低速,電機的轉速觀測值可以較好地跟蹤電機實際轉速,誤差較小。電機轉速為125r/min時的速度辨識結果如圖7所示。由圖7可知,對應的磁鏈角度變化,保持周期性變化,轉子磁鏈α軸的分量如圖8所示,穩(wěn)定為正弦量,可以看出磁鏈觀測器同樣具有較好的觀測性能。

圖5 給定轉速為1400r/min時,速度辨識結果
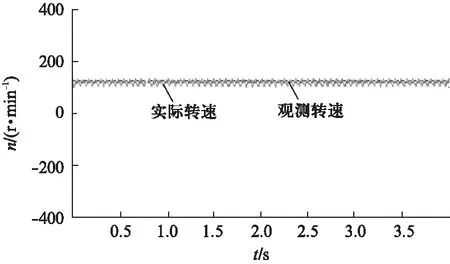
圖6 給定轉速為125r/min時,速度辨識結果
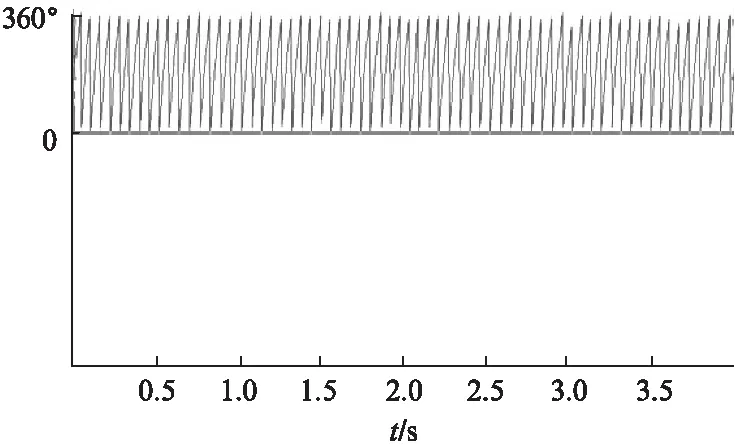
圖7 磁鏈角度變化波形

圖8 轉子磁鏈α軸分量波形
突加突減負載時,電機的觀測轉速和轉矩電流分量的變化波形如圖9所示。電機先空載穩(wěn)定運行于1400r/min,然后突然加額定負載,從圖中可以看出電機轉速先有略微下降,然后調節(jié)到額定轉速,轉矩電流分量增大并能夠保持穩(wěn)定,接著突然減去額定負載,轉速略微上升,然后保持為額定,轉矩電流分量減小到0。
電機給定轉速為300r/min時,突加突減負載的試驗結果,可以看出具有和額定轉速時相當的性能,電機轉速受負載變化的影響較小,轉矩電流分量響應快。不管是在高速還是低速,系統(tǒng)都能保持穩(wěn)定運行。

圖9 給定轉速為1400r/min時,負載變化試驗結果
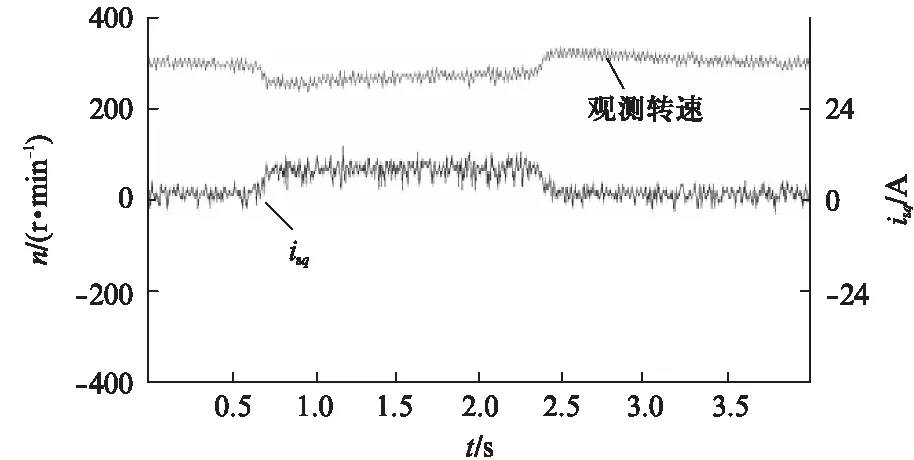
圖10 給定轉速為300r/min時,負載變化試驗結果
5 結 語
本文提出了一種基于偽降階磁鏈觀測器的速度辨識方法,詳細分析了該方法的基本原理,依據Popov超穩(wěn)定理論設計了反饋增益矩陣,獲得了滿足觀測器穩(wěn)定性的條件,保證了電機低速運行的穩(wěn)定。仿真和試驗驗證了該方法的可行性和實用性,從低速到高速范圍,電機都能穩(wěn)定運行,無不穩(wěn)定現象。
【參考文獻】
[1] SUWANKAWIN S, SANGWONGWANICH S . Design strategy of an adaptive full-order observer for speedsensorless inductionmotor drivestracking perfo-rmance and stabilization [J]. IEEE Trans on Industry Electronics, 2006,53(1): 96-119.
[2] 陳名輝,阮毅,宗劍,等.無速度傳感器在礦用電機車矢量控制系統(tǒng)中的應用[J].電機與控制應用,2012,39(2): 17-20.
[3] KUBOTA H, MATSUSE K, NAKANO T. DSP based speed adaptive flux observer of induction motor. IEEE Trans Ind Applicat, 1993, 29(2): 344-348.
[4] YANG G, CHIN T H. Adaptive speed identification scheme for a vector controlled speed sensor-less inverter induction motor drive. IEEE Trans Ind Applicat, 1993, 29(4): 820-825.
[5] LIN Y N, CHEN C L. Adaptive pseudo-reduced-order flux observer for speed sensorless field oriented control of IM. IEEE Trans Ind Electron, 1999, 46(5): 1042-1045.
[6] KOJABADI H M, CHEN C L. A MRAS-based adaptive pseudoreduced-order flux observer for senso-rless induction Motor Drives. IEEE Trans on Power Electronics,2005, 20(4): 930-938.
