GPS L5模擬器基帶信號的生成
2014-08-21 08:47:14楊東凱李社軍
全球定位系統 2014年2期
關鍵詞:信號
穆 雪,張 波,楊東凱,李社軍
(1.北京航空航天大學電子信息工程學院,北京 100191;2.中國伽利略衛星導航有限公司,北京 100191;3.63600部隊,甘肅 酒泉 732750)
0 引 言
自1995年美國宣告GPS進入全面運行狀態以來,GPS充分顯示了其在導航、定位中的領先地位,許多領域也由于GPS的出現發生了革命性的變化。為使GPS更好地滿足軍事、民間和商業用戶不斷增長的應用需求,美國決定采用先進技術改進和完善GPS.增發與生命安全有關的L5載頻(1 176.45 MHz)信號是GPS現代化的一項重要內容[1]。
2005-2010年,GPS Block IIR衛星和更前一批衛星逐漸退役,美國提出要陸續更換新一代的Block IIF衛星,同時決定在此衛星上播發L5頻段衛星信號。美軍計劃一共要發射12顆GPS IIF衛星,截止到2014年3月,只有五顆Block IIF衛星在軌運行,這就限制了新型接收機的研制與測試[2-3]。衛星信號模擬器可以模擬不同條件下接收機天線前端接收到的衛星信號,能夠實現對接收機的性能評測,鑒定其捕獲、跟蹤能力和定位測量精度[4]。國內由于對信號模擬器的研究起步比較晚,且國外對技術進行封鎖,對L5頻段模擬器的研究相對較少。國內論文大部分只是對L5信號體制的研究并沒有關于L5信號模擬器的敘述。鑒于此,本文在研究GPS L5信號結構的基礎上,簡要介紹了GPS L5模擬器的整體架構,重點介紹了上位機信號生成部分導航參數計算模塊,最后使用清華大學自行研制的GNSS接收機對生成的信號進行驗證。
1 L5信號結構特點
L5信號生成原理[5-6]如圖1所示,兩路幅度相等、相位正交的載波調制形成L5信號。其中一路被稱作同相(I)支路,調制有擴頻碼、導航電文、同步序列,另一路被稱作正交(Q)支路,調制有擴頻碼、同步序列,兩路信號經過四相調制(QPSK)形成L5信號。L5導航電文的一個基本幀(數據塊形式)為300 比特,該300比特由276比特的電文數據加上24位的冗余校驗(CRC)編碼形成,速率為50 bit/s.基本幀首先經過1/2比率,K=7的前向糾錯卷積編碼(FEC),編碼后的符號速率變為100符號/秒(sps),再經過10 bit的紐曼-霍夫曼(Neuman-HofmanNH)編碼,“1”變為“1111001010”,“0”變為“0000110101”。經過NH編碼后的數據流與10.23 Mbps/s速率的擴頻碼調制,形成數據通道I.Q支路中,擴頻碼與20 bit的同步序列(00000100110101001110)調制。I、Q支路序列以1 176.54 MHz的頻率進行QPSK調制,形成L5信號。
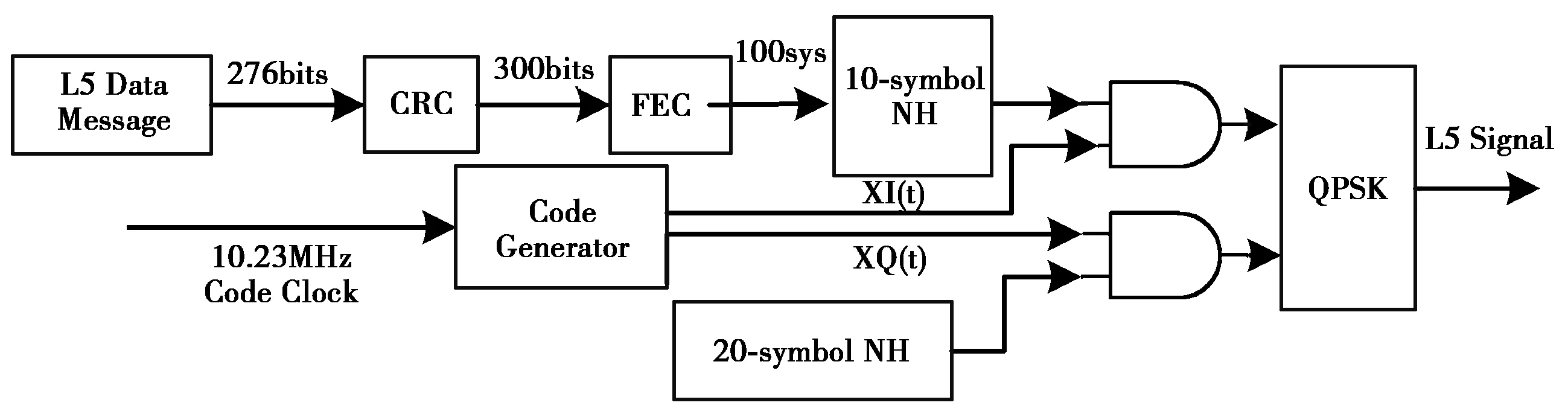
圖1 L5信號生成原理
2 GPS L5模擬信號生成整體方案
本文所設計的GPS L5模擬器信號生成整體流程如圖2所示,用戶通過人機交互界面輸入用戶配置信息,上位機軟件根據用戶輸入的信息產生載體目標的運動狀態,在目標運動狀態生成的同時,上位機分線程啟動,讀入星歷文件,生成導航參數。上位機根據生成的導航參數以及目標的運動狀態,計算當前仿真時刻的可見星狀態(可見星的計算采用二分法[7]),生成可見星的導航電文以及各種控制字狀態,通過數據裝幀模塊打包成數據幀。上位機通過網線與硬件部分的NI機箱進行連接。NI機箱的作用是將接收到的數據包進行轉發,轉發到中頻板卡上,同時辨別接收到的數據包屬于哪個頻點,將之轉發到相應的板卡上并使用Windriver驅動開發工具生成PCIE驅動程序。經NI機箱轉發到中頻板卡與射頻板卡上的信號經過調制與上變頻,產生L5射頻信號。
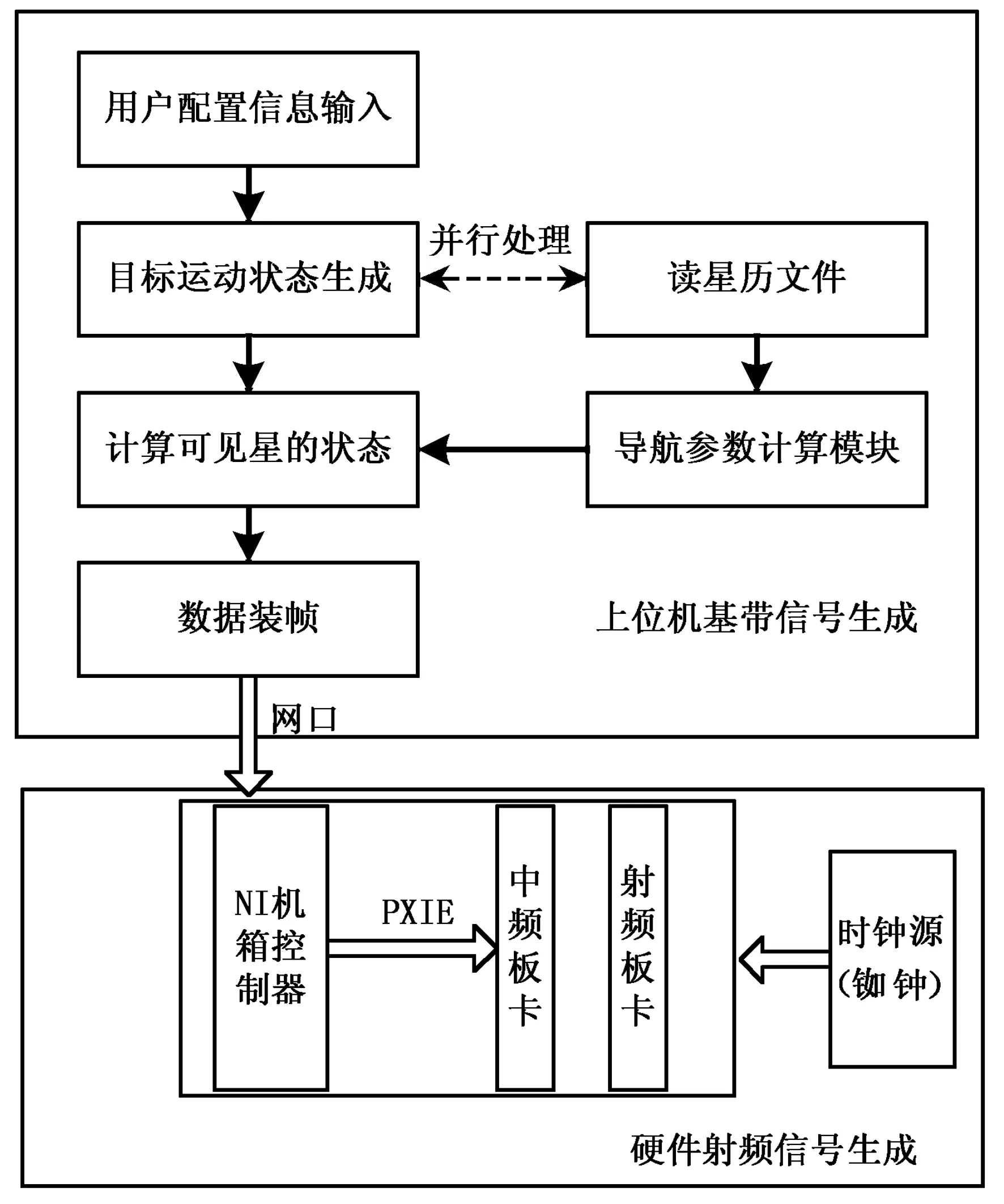
圖2 GPS L5模擬器信號生成流程圖
3 L5上位機基帶信號生成

目前在軌運行的Block IIF衛星只有五顆,尚未得到L5的星歷數據文件,本文暫時使用L1的星歷文件代替L5星歷文件。表1是GPS L1與L5導航電文參數的對比分析,通過對比可以得知 L1的16個星歷參數演變成L5的18個參數,L5增加了GGTO(GPS/GNSS 時間偏差)和地球定向參數(GGTO參數可以實現與不同GNSS之間的兼容和互操作,地球定向參數可以方便用戶實現地心地固坐標系與地心慣性坐標系之間的轉換,提高接收機的解算效率),L5信號歷書被分成中等精度歷書和簡化歷書,L1的導航信息修正表被L5的差分修正參數取代,衛星健康狀況由信號健康狀況取代,專用電文變成了文本信息[8]。
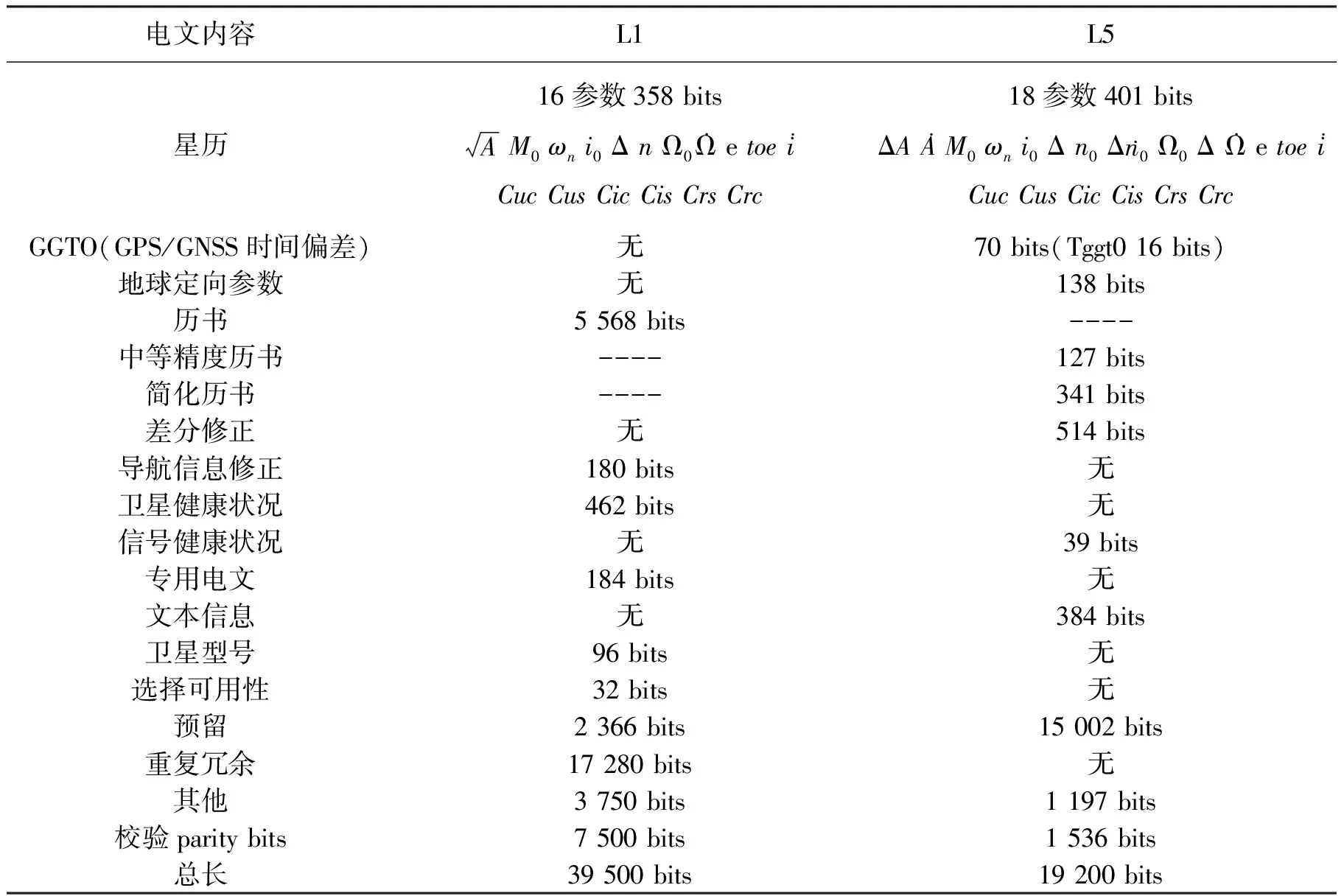
表1 GPS信號導航電文參數的對比分析
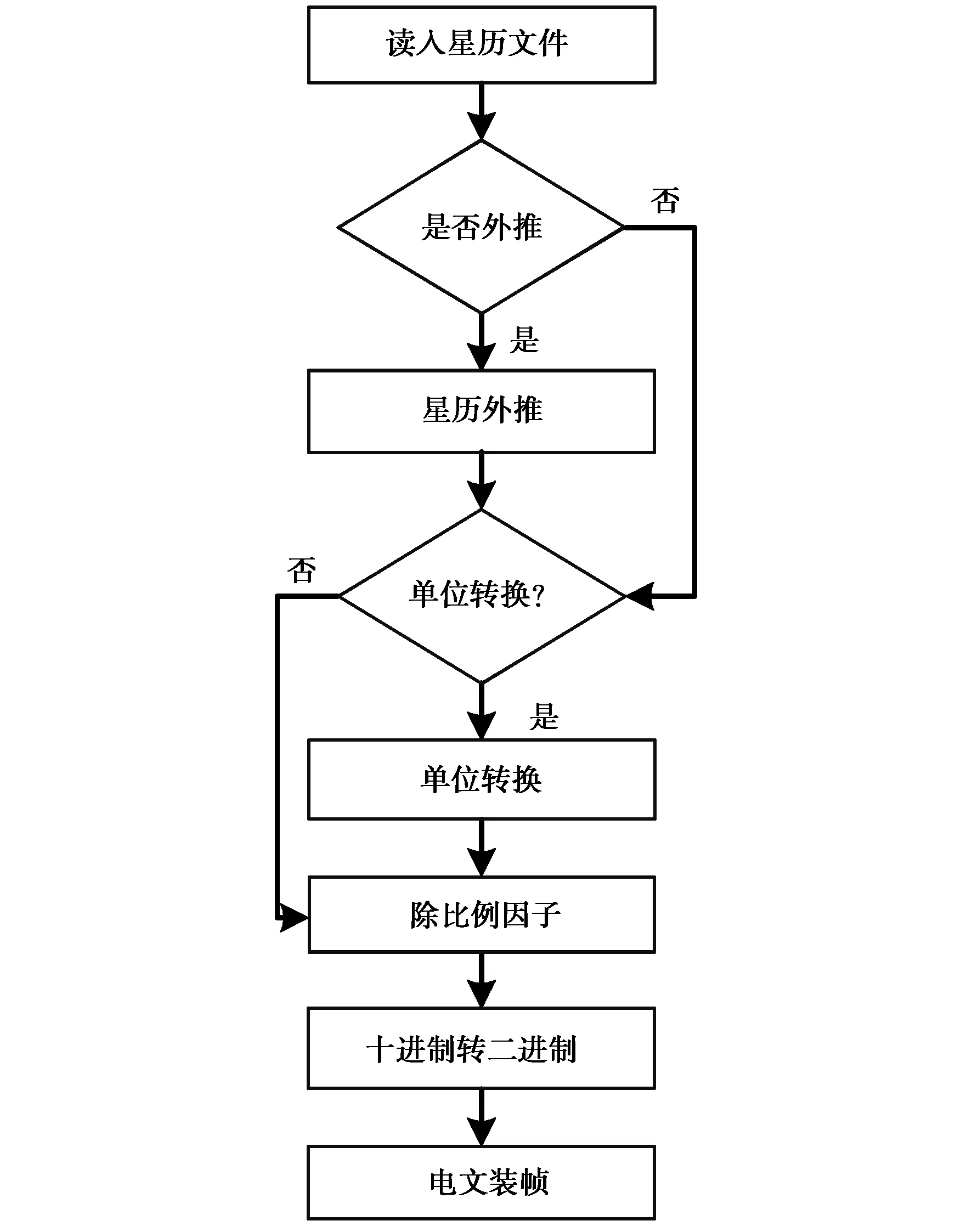
圖3 導航電文生成流程圖
由GPS L1星歷文件(RINEX格式)內容說明[9]可以得知,星歷文件中主要播發時鐘參數以及星歷參數。由表(1)可知,L5信號的18個星歷參數的變化主要體現在半長軸、軌道平均速率、升交點赤經的算法不同。下面具體說明如何由L1的星歷參數計算L5的星歷參數。
依據文獻[5],L1半長軸A的計算方法為
(1)

軌道平均速率n計算方法為
n=n0+Δn,
(2)
(3)
式中:Δn為L1星歷文件參數;u=3.986 005×1014.
依據文獻[6],L5半長軸A的計算方法:
A0=AREF+ΔA,
(4)

(5)
軌道平均速率n計算方法為
(6)
n=n0+Δn,
(7)
(8)
升交點赤經變化率計算方法:
(9)

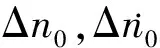
L5信號總共有64種類型(type0-type63)的導航電文。如圖4所示,L5導航電文的基本幀包含8比特的同步碼“10001011”,6比特的衛星PRN號,6比特的幀類型號0(000000)-63(111111),17比特的周內秒計數(TOW),239比特的電文數據,24位的冗余校驗。十進制轉二進制后形成的數據按圖4所示的基本幀結構裝幀、存儲,以便其它程序調用。
圖4 L5基本幀結構
GPS L5信號導航電文的基本類型Type1-Type5在2002年10月2號的ICD-GPS-705 的版本中定義。Type10-Type15,30-37在2011年9月21日的IS-GPS-705B 版本中定義。目前GPS L5衛星只播發type10-Type15,Type30-Type37類型的信號,之前定義的信號已經停止播發。所以本論文中只編寫了最新的導航電文類型Type10-Type11,Type30-Type37.
4 生成信號的測試
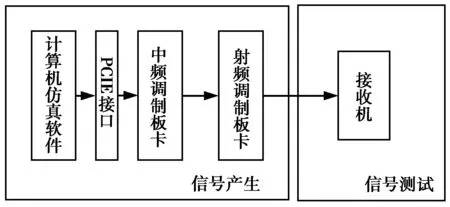
圖5 信號測試流程圖
本測試采用模擬器-接收機閉環測試驗證信號正確性。信號測試流程如圖5所示,上位機產生的基帶信號經過中頻與射頻板的調制與變頻產生L5射頻信號,接入接收機進行定位解算。測試所采用的接收機為清華大學研發的GNSS軟件接收機。接收機的工作流程為射頻采集卡采集的模擬器產生的GPS L5射頻信號經下變頻和D/A轉換形成數字中頻信號;相關器在跟蹤環路的控制下完成信號的載波剝離、偽隨機碼解擴和積分累加;跟蹤環路完成碼跟蹤、載波跟蹤;軟件實現位同步和幀同步,導航解算完成電文的解碼和定位解算。圖6表示的是模擬器硬件設備連接圖,硬件設備包括上位機、NI機箱、中頻電路板、射頻信號源。
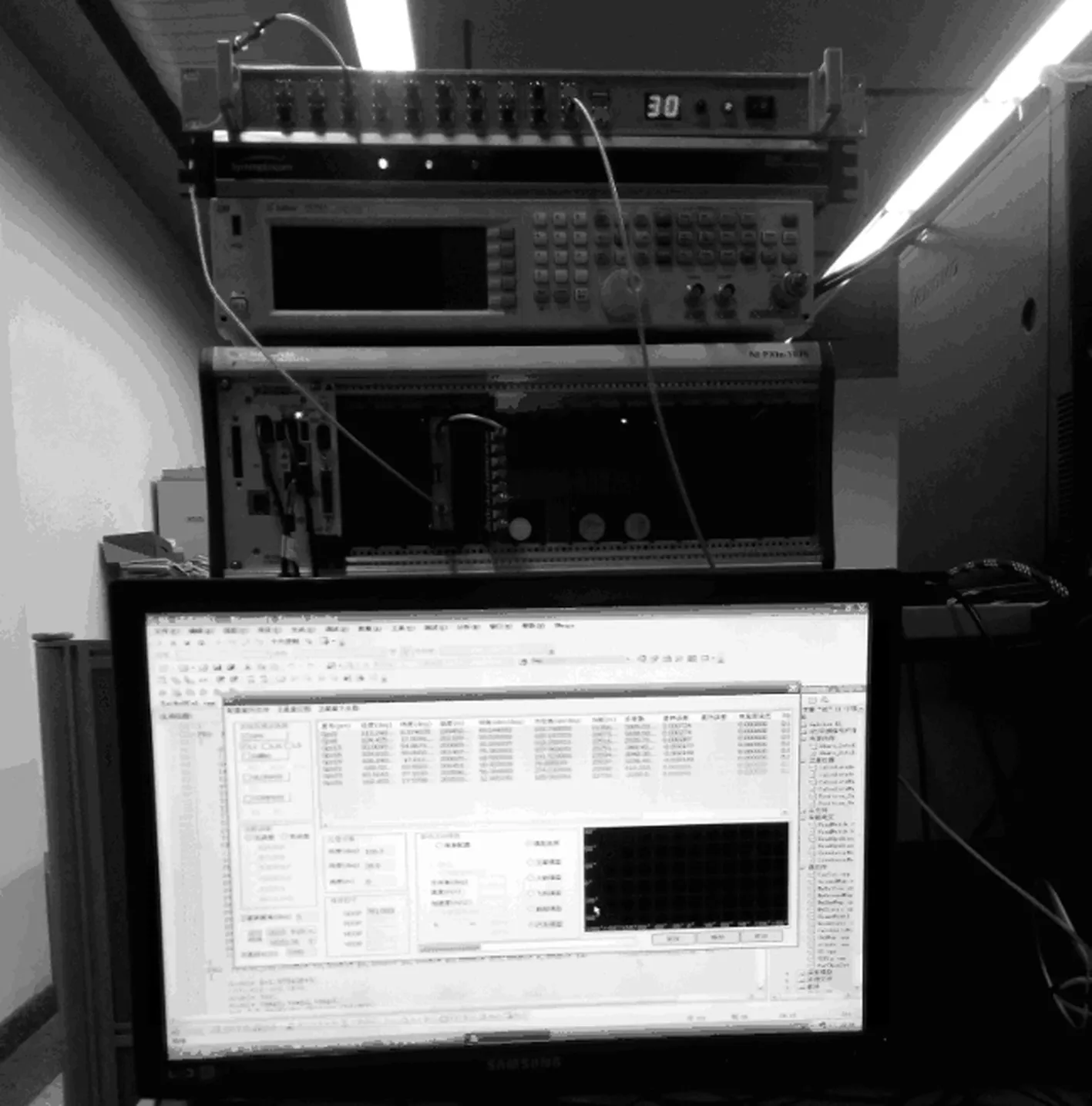
圖6 設備硬件連接圖
測試結果如圖7、8,圖7表示上位機發送的可見星界面圖,圖8表示接收機解算的可見星信息。對比兩幅圖,可以看出接收機收到的衛星號與模擬器發送的可見星星號一致。圖7(b)中的CCBF表示L5信號通過了捕獲、跟蹤,實現位同步與幀同步,TransmitTime是接收機解算出的導航電文中的信號發射時間,Doppler是解算出的衛星的多普勒頻移。通過接收機的驗證,可以實現L5信號的定位(由于定位精度有待提高,未附定位結果),驗證了生成的L5信號的正確性。
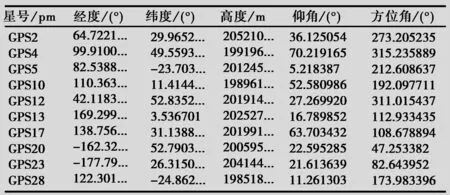
圖7 模擬器運行界面
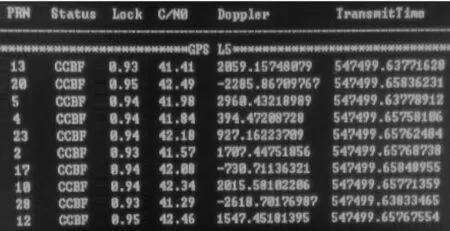
圖8 接收機顯示界面
5 結束語
GPS L5信號模擬器的研制對新型接收機的研制、測試具有重要意義。上位機生成正確的基帶信號是模擬器能夠正常工作的前提。本文在研究GPS L5信號結構特點,對比L1與L5導航電文的基礎上,生成了L5上位機信號并通過接收機驗證了其正確性。但由于設備資源等條件的限制,仍有許多需要提高和完善的方面。下一步將繼續研究、修改軟件中的算法,以進一步提高L5模擬器產生信號的定位精度。
[1]謝 鋼.GPS原理與接收機設計[M].北京:電子工業出版社,2009:1-3.
[2]李 躍,邱致和.導航與定位——信息化戰爭的北斗星[M].2版.北京:國防工業出版社,2008:197-300.
[3]北斗官網.美國:發射第五顆GPS IIF衛星 新一代導航衛星在研[EB/OL].[2014-02-26].http://www.beidou.gov.cn/2014/02/26/20140226afe622d4b41e4394abd13b119937453d.html.
[4]李保柱,張其善,楊東凱.GPS衛星信號模擬器載波和碼NCO研究與實現[J].測試技術學報,2006,20(6):518-522.
[5]DOD.Golbal positioning system directorate systems engineering & integration interface specification IS-GPS-200G[R].2012.
[6]DOD.Golbal positioning system directorate systems engineering & integration interface specification IS-GPS-200G[R].2011.
[7]顏慶津.數值分析.[M]北京:北京航空航天大學出版社,1999.
[8]張 冰.GPS L2C信號仿真和分析研究[D].上海:上海交通大學,2012.
[9]都欣欣.GNSS信號模擬器導航電文及狀態參數產生方法的研究與實現[D].北京:北京航空航天大學,2006.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
