軸孔內的同軸定位機構
2014-08-31 09:48:32程顯東
山東工業技術 2014年21期
關鍵詞:測量
程顯東
(吉林省自考辦,長春 130033)
近年來,隨著科學技術的不斷發展,各種光學儀器得到了廣泛應用。光學測量裝置在一些領域中也成為不可缺少的裝置,并且在測量過程中,對其精度具有較高的要求。同時,由于光學測量結果的主要影響因素為測量裝置在軸孔中的定位精度,因此,對裝置的定位機構也會提出很高的要求。目前常用的定位機構有孔配合、彈性支點和錐孔配合三種,這三種機構都存在各自的缺點,因此,為了克服現有定位機構所存在的不足,本文提出了一種適用于孔軸內的新型同軸定位機構,可以實現較高精度的測量。
1 原理
對于一個尚未定位的工件而言,工件在空間存在六個自由度,這六個自由度分別為即沿x、y、z三個直角坐標軸方向的移動自由度,以及繞三個坐標軸的轉動自由度。因此,要完全確定工件的位置,就必須消除這六個自由度。通常采用的方法是在軸孔中選擇六個分布合理的支承點來限制待測工件的自由度,該原理即稱為六點定位原理,其示意圖如圖1所示:圖上A、B、C三點均勻分布在圓周上確定唯一的外接圓圓心O,A′、B′、C′三點均勻分布在圓周上確定唯一的外接圓圓心O′,則兩個圓心的連線OO′就是工件的結構軸線。

圖1 六點定軸原理示意圖
2 基本機構
本文提出的裝置結構如圖2和圖3所示,分別由內筒、漲筒和對絲螺桿以及兩個漲套六個部分組成。其中,裝置的對絲螺桿由兩段螺距相同、旋向不同且不等徑螺桿組成,與彈性爪相連的是兩個漲筒,兩個漲筒的一個端面都分別與對絲螺桿相連接,長度方向上較短的為短漲筒,與近端彈性爪相連,較長的為長漲筒,與遠端彈性爪相連。漲筒的離螺紋端向外凸起形成外錐面,與彈性爪內錐面靠合緊密,兩個錐面的錐度基本相同。裝置工作時,單向旋轉對絲螺桿,由于粗細兩段螺桿及與之配合的長短漲筒的螺紋旋向相反,導致外錐面運動方向相反,內外錐面剛性接觸,將長短漲筒的軸向作用力轉變成徑向作用力,使彈性爪同時向外運動,爪頂運動量由內外漲筒的軸向相對運動量決定,又由于內外漲筒與彈性爪都是剛性的,漲緊后三點即可與軸孔緊密接觸。由錐面在三爪處錐度一致、螺紋螺距相同的兩個前提下,對絲螺桿在外力作用下單向旋轉一定角度,就保證了長短漲筒沿軸方向移動距離相同,彈性爪端沿徑方向移動距離也相同。由于彈性爪近軸部分設計成扁平形狀,使得彈性爪單爪都具有彈性,在設計上考慮到彈性爪具有微量變形的同時還需要有一定的剛性,故而設計彈性變形量只有1mm左右,所以裝置只適用于同一型號的軸孔。兩個漲套的設計與漲筒的設計相互對應,各具有三個120°均勻分布的彈性爪,爪端設計成球面,球面半徑小于待安裝的軸孔內徑,這樣爪頂端與軸孔的內壁接觸時為點接觸,實現了裝置與軸孔的三點接觸,前后端的彈性爪各自確定了一個圓心,由前后兩個三點分別確定的兩個圓心,兩個圓心連接起來形成的直線就代表了裝置的軸線,且由于彈性爪與軸孔內面緊密接觸,就實現了軸孔內裝置與軸孔的同軸定位目的。
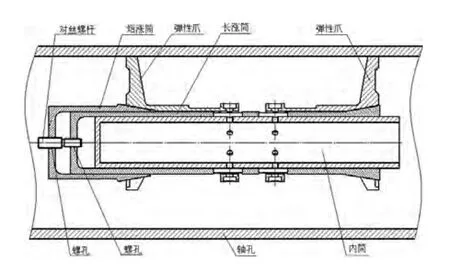
圖2 軸孔內同軸定位機構剖視示意圖
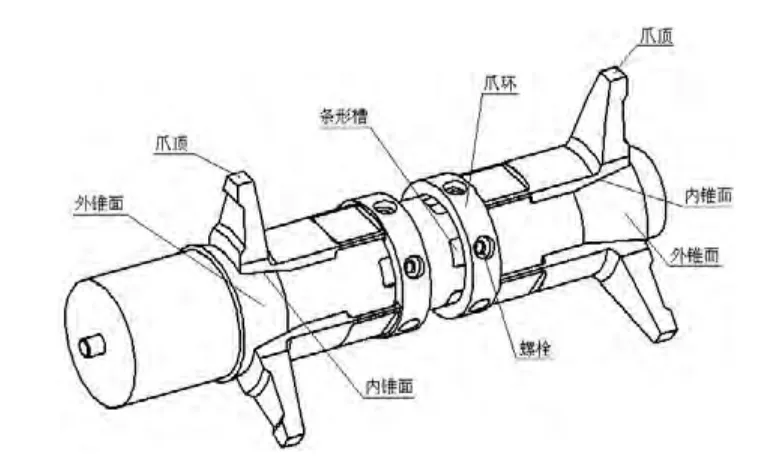
圖3 軸孔內同軸定位機構外部立體圖
3 結束語
本文所提出的新型定位機構,由于其起支撐作用的彈性爪與軸孔間的接觸均為剛性接觸,因此較其他定位裝置而言,可承受更大的負荷,這樣就可以保證在震動或其他復雜情況下,都可使測量裝置與待測軸孔具有更高精度的同軸狀態。同時,機構上的各彈性爪之間受力均勻,這樣既可保證其與軸孔內壁時刻保持漲緊狀態,該狀態所提供的巨大摩擦力即可使測量裝置在測量過程中穩固固定,進而使測量裝置能夠滿足很多領域對高同軸度的要求。
[1]成大先主編.機械設計手冊[S].北京:化學工業出版社,2002.
[2]馬宏,王金波主編.誤差理論與儀器精度[M].北京:兵器工業出版社,2007.
[3]龐振基,黃其圣主編.精密機械設計[M].北京:機械工業出版社,2000.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00