基于變系數α-β-γ濾波的目標跟蹤仿真研究
2014-09-03 23:12:19李樹軍,趙育良,王淑娟
電子設計工程 2014年11期
關鍵詞:關聯
基于變系數α-β-γ濾波的目標跟蹤仿真研究
針對目標跟蹤中聯合數據關聯算法計算量大,隨目標數目增多呈幾何增長而導致跟蹤效率低下的問題,主要介紹了順序數據關聯快速算法(MSFAFDA),建立了基于變系數α-β-γ濾波和順序數據關聯快速算法的模型,并進行了模擬戰場實際目標的仿真試驗。仿真結果表明該算法能較好的跟蹤目標,其跟蹤精度符合要求,提高了跟蹤實時性。
仿真;目標跟蹤;變系數α-β-γ;濾波
在現代戰爭中,利用多種傳感器對目標進行跟蹤和識別是獲取戰場情報的主要手段之一。多目標跟蹤的任務是利用傳感器獲得的觀測信息,對目標進行精確的當前狀態估計和以后狀態預測。多目標跟蹤包括跟蹤門的形成,數據關聯、跟蹤起始與終結等環節,其主要標志是數據關聯與濾波理論的有機結合,正確地判定量測信息的來源是有效維持目標跟蹤的關鍵[1]。由于各傳感器觀測數據存在系統誤差,傳至融合中心數據存在平移和旋轉等變化,在融合中心航跡關聯一旦關聯錯誤,將產生錯誤的目標航跡,使得真實目標航跡丟失。因此,建立準確的目標航跡和戰場態勢,在多目標跟蹤過程中,尤為重要[2]。
1 變系數α-β-γ濾波方程
預測方程:α

j∑
變系數α-β-γ濾波器具有較好的跟蹤性能,能跟蹤機動目標[3]。
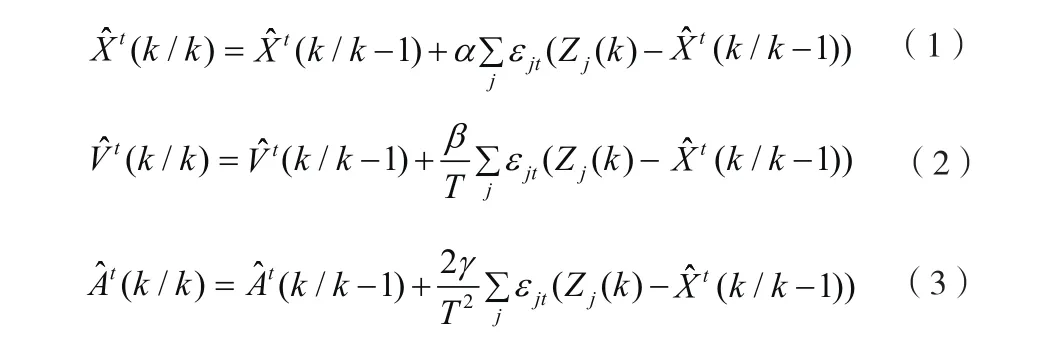
濾波方程:αε( () (/ 1))? ?
∑
2 順序數據關聯快速算法
Z k X k k
t Z k X k k
jt j j
t( () (/ 1))? ?
∑
αε
jt j j
在多目標密集的環境中,由于JPDA算法的關聯概率的計算量隨密集回波個數的增加而呈指數增長,明顯影響計算速度,因而不適于實時跟蹤密集回波下的多個機動目標[4]。由于數據關聯快速算法(FAFDA)的計算量隨密集回波個數的增加只呈線性增長,其實現實時跟蹤的速度明顯優于JPDA算法[5],其跟蹤精度也滿足要求,在此基礎上,構造順序數據關聯快速算法(MSFAFDA),具體步驟如下:
1)確定量測點j與己知目標t互聯的所有簡單事件,計算量測j落入目標t跟蹤門內的概率Pjt(k)[6]:其中:λ雜波密度;PD為雷達檢測概率;N[djt(k),0,St(k)]為正態分布密度函數。

2)對第一個傳感器確認量測。對第一個傳感器的所有量測 Z1.j(k),利用橢球門來確認是否為t目標的有效回波[7]。



3 仿 真
k Z k X k k()[ () (/ 1)]()k? ?
∑ε k k k Z k X k k
t
t
^
jj =
1, 1 0(/ 1) ()[ () (/ 1)]?+ ? ?
∑
^
m k
t
t()[ () (/ 1)] k()1()ε
1, 1 0
^
t
jj =
jj j=
αε
t k Z k X k k? ?
∑
1, 1 0 1)]? 1)]
在此仿真中,模擬兩部雷達獲取觀測數據,采用變系數α-β-γ濾波和順序數據關聯快速算法對目標進行跟蹤和關聯。
3.1 具體參數設置
掃描周期:T=5 s;雷達觀測噪聲標準差是:σv=0.4 km;雷達檢測概率:PD=0.99;落入關聯門概率:P=0.99;雜波密度:λ=0.05 km2;尺寸因子:K=3.034 9;
3.2 仿真結果及分析結論
本仿真中,為簡化計算,假設跟蹤3個地面運動目標,跟蹤期間目標數目無變化且各自的航跡確定。采用MSFAFDA和FAFDA算法,對相同目標進行仿真。
由于觀測軌跡與跟蹤軌跡之間的差值太小,為便于在圖中觀看和比較,把觀測軌跡與跟蹤軌跡之間的差值擴大了10倍。
由圖1可以看出,根據上述兩種算法計算出的目標航跡與觀測軌跡趨勢一致,這說明了這兩種算法具有收斂性。
由圖2、3誤差對比可以看出,MSFAFDA算法計算出的數據平均誤差小于FAFDA算法計算出的數據平均誤差,跟蹤精度有所提高。在MSFAFDA算法中,跟蹤目標的最大誤差是0.056 5 km,FAFDA算法中,跟蹤目標的最大誤差是0.179 9 km,跟蹤總趨勢與真實軌跡一致。從耗時上看,MSFAFDA算法所用時間略大于FAFDA算法所用時間。跟蹤誤差變大,是因為多個目標航跡進行交叉或目標密度變大時所致,隨著目標密度變小或目標航跡不交叉時,誤差又會逐漸變小(限于篇幅,仿真了3個運動目標,本文只列出了其中1個目標航跡示意圖)。誤差對比如圖2~圖3所示。
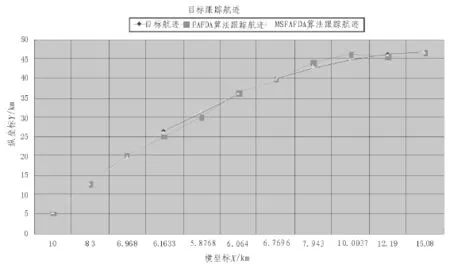
圖1 目標觀測軌跡與跟蹤軌對比圖Fig.1 Comparison of observation and tacking trajectory

圖2 X坐標誤差對比示意圖Fig.2 Comparison of error among x coordinate
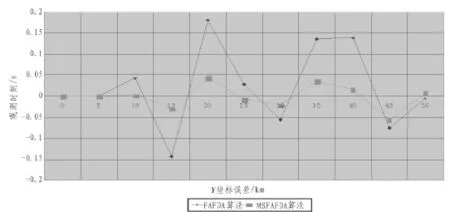
圖3 Y坐標誤差對比示意圖Fig.3 Comparison of error among y coordinate
4 結束語
文中簡要介紹了順序數據關聯快速算法、變系數α-β-γ濾波方程,并進行了仿真驗證實驗,仿真結果驗證了該算法的有效性。
[1] 劉同明,夏祖勛,解洪成.數據融合技術及其應用[M].北京:國防工業出版社,1998.
[2] 王圣東,管飛,陳林元,等.多目標環境下基于分布式融合思想的誤差估計方法 [J].指揮控制與仿真,2013,35(4):131-137.
WANG Sheng-dong,GUAN Fei,CHEN Lin-yuan,et al.Algorithm for bias estimation base on distribution Fusion in multi-target environment[J].Command Control & Simulation,2013,35(4):131-137.
[3] 揚萬海.多傳感器數據融合及應用[M].西安:西安電子科技大學出版社,2004.
[4] An improved multiple model GM-PHD filter for maneuvering target tracking[J].Chinese Journal of Aeronautics,2013,26(1):179-185.
[5] 高倩.基于信息融合的多傳感器多目標跟蹤算法研究[D].煙臺:魯東大學碩士論文,2012.
[6] 李樹軍.基于數據關聯快速算法的目標跟蹤與仿真研究[J].紅外技術,2008,30(5):268-270.
LI Shu-jun.Research on targets tracking using Fast algorithm for data association and simulation[J].Infrared Technology,2008,30(5):268-270.
[7] 林亦寧.基于廣義Hough 變換的目標跟蹤算法研究[D].杭州:浙江大學,2013.
李樹軍,趙育良,王淑娟
(海軍航空工程學院青島校區 航空儀電控制系,山東 青島 266041)
Algorithm research of targets tracking based on variable coef fi cient α-β-γ fi lter
LI Shu-jun,ZHAO Yu-liang,WANG Shu-juan
(Department of Aerial Special Equipment,Qingdao Campus of NAEI,Qingdao 266041,China)
Sequential Fast Algorithm for Data Association was introduced in allusion to problem of inefficient targets tracking induced by a mass of calculation with sensors.Based on coefficient α-β-γFilter and MSFAFDA model was established.At last,simulation experiment for targets in battlefield was conducted,which validates that the algorithm in real-time track targets and tacking precision was up to the mustard..
simulation;targets tracking;coefficient α-β-γ;filter
TP391
A
1674-6236(2014)11-0152-03
2013-09-11 稿件編號:201309089
李樹軍(1973—),男,山東萊蕪人,碩士研究生,講師。研究方向:目標跟蹤與識別、仿真。
猜你喜歡
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:30
當代陜西(2021年17期)2021-11-06 03:21:36
原道(2020年2期)2020-12-21 05:47:06
當代陜西(2019年15期)2019-09-02 01:52:00
中國非營利評論(2018年2期)2018-06-18 10:48:50
學苑創造·A版(2018年11期)2018-02-01 06:29:20
自動化學報(2017年1期)2017-03-11 17:31:17
讀者(2017年5期)2017-02-15 18:04:18
西藏科技(2016年5期)2016-09-26 12:16:39
振動工程學報(2015年1期)2015-03-01 01:15:42