三維激光掃描應用步入新高度
2014-09-05 08:18:04
中國建設信息化 2014年14期
近年來,隨著三維激光掃描系統的普及,其應用領域不斷擴大,如古跡保護、遺址測繪、建筑測量、城市模型、水電大壩、滑坡變形監測等行業都有涉及,它可以根據用戶的需要提供極為豐富的三維立體空間模型及三維定量分析,有著很高的社會經濟效益。
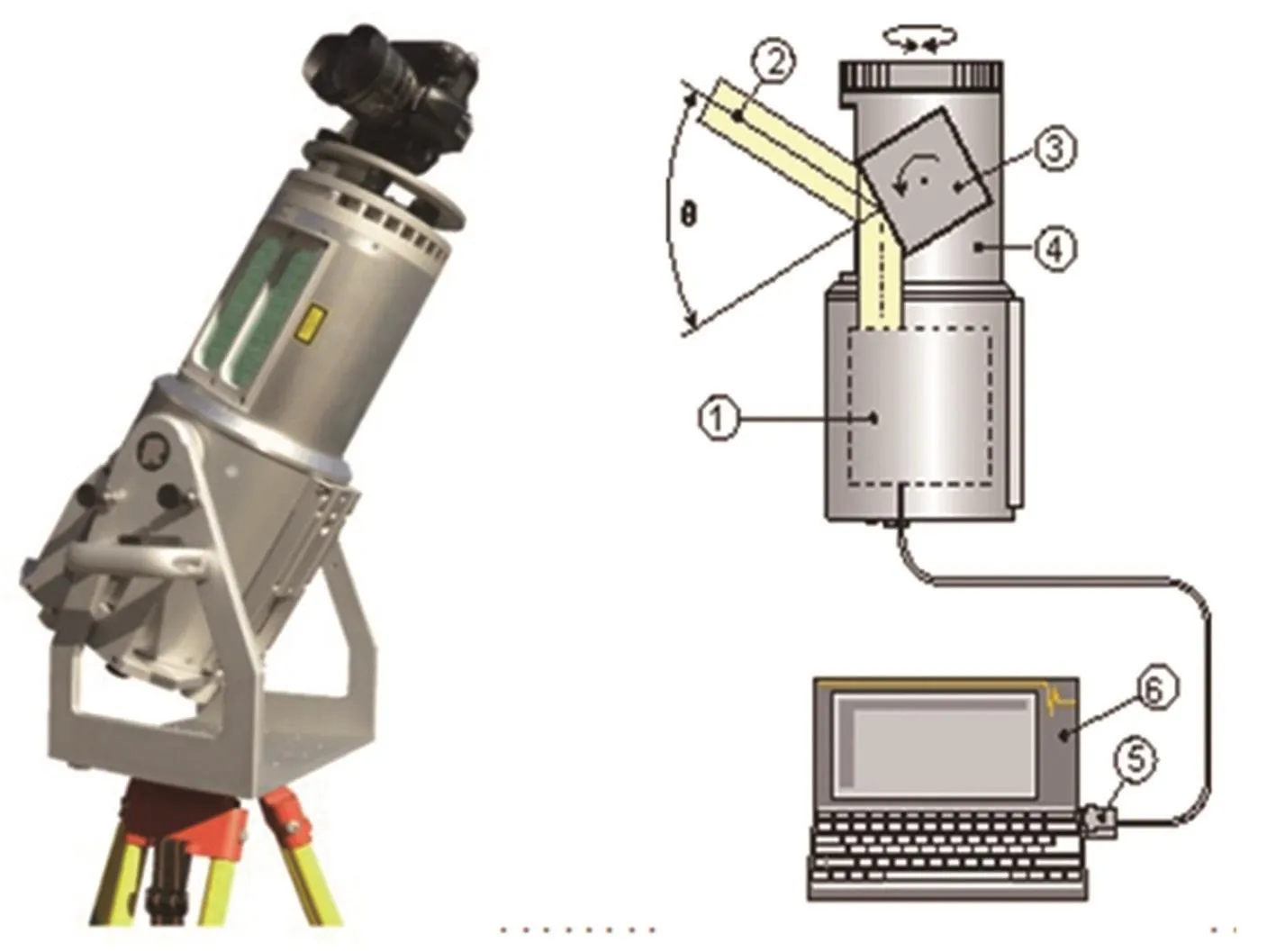
>>圖1 RIEGL LMS-Z420i地面激光掃描系統
與傳統的單點測量方式不同,三維激光掃描測量儀采用面掃描的測量方式,獲取被測量目標表面大量的高精度三維點,滿足了高精度逆向工程對三維點的數據量的需求。作為現代高精度傳感技術,三維激光掃描測量儀可以深入到復雜的環境和現場進行掃描操作,并直接將各種大型的、復雜的、不規則實體的三維數據完整地采集到計算機中,從而快速重構出掃描物體的三維模型。同時,由于搭載了高像素的數碼相機,它所采集的三維激光點云數據不僅包含目標的空間信息,而且記錄了目標的反射強度信息和色彩灰度信息。通過對三維點云數據的后處理,可以實現分析、量測、仿真、模擬、監測等功能。以地面三維激光掃描儀為例(圖1),它具有高達12000點每秒的數據采集速率,點位精度可以達到6mm,對于一般場景的全景掃描僅需十幾分鐘,且儀器連接、設置簡單,不需要復雜的操作。
激光點云成果可劃分為為兩類,其中,二維成果中,各種線畫圖、正射影像等均可用CAD等常用軟件打開并編輯,進行相關的量測等操作;所有的三維產品也可以導出為各種常見格式,用戶可以在一般三維軟件上對其進行瀏覽與分析。
MicroStation是一款多用途繪圖軟件,它支持多種不同硬體平臺,包 括 Intergraph、IBM、HP、SUN、DEC、SGI等工作站級電腦及PC與MAC等個人電腦,及多種操作系統,包括UNIX、linux及Windows。它所支持的硬體平臺及操作系統已覆蓋目前世界上所有較為知名的硬體廠商。因此,用戶可以根據使用需要及效率需求自由選擇所需的硬體平臺及操作系統。早在AutoCAD的用戶還處在2.5D的繪圖環境中時,MicroStation的用戶已然在完整的3D環境中優游操作。而符合OSF/MOTIF標準的圖形化使用介面及其它眾多輔助作圖工具,MicroStation代表了新一代電腦輔助繪圖軟件的標準。同時,針對建筑、橋梁、管道等眾多領域的專業插件的開發與使用使其在工程設計施工領域獨占鰲頭。
正是基于MicroStation能夠處理數以億計的激光掃描點云數據,并且能夠兼容柵格影像的優點,我們將其引入到激光掃描數據處理中。
深入應用
常規測量手段在面對一些無法接觸、運算較為復雜的測量任務時稍顯薄弱,如剖面測量、多點高密度測量等。由于激光點云具有三維坐標屬性,且點云密度極大(可以達到2cm的點云間隔),在一些需要利用坐標進行分析計算的相關應用中也極具使用價值;輔以高分辨率影像可以使點云效果更佳逼真。
以某橋梁(橋墩)變形檢測以及橋梁三維建模項目為例。首先導入掃描點云及掃描時拍攝的目標影像,因為影像是經過配準的(即影像平面坐標與掃描點云的三維坐標相對關系經過計算已經得出),在MicroStation中影像與點云的位置是完全吻合的,顯示效果如下。這其中的主要操作對象還是激光點云,疊加影像是為了增強可視性,同時可以利用影像的清晰度和分辨率對點云處理進行質量控制,畢竟,點云的數量始終是有限的,如果完全利用點云進行分析和建模等是會帶來一定的偏差(結構拐角等地方),而影像的像素則記載了目標表面的準確屬性。
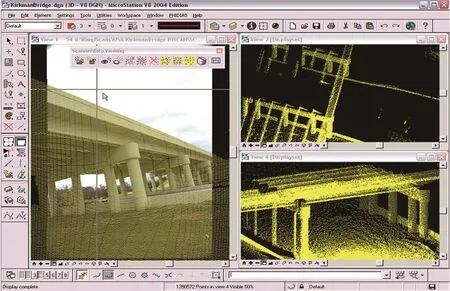
>>圖2 導入的激光點云與影像

>>圖3 剖面截取
在實際應用過程中,用戶可以任意指定剖面截取的方向,使用Profile功能將點云沿指定方向進行移動(剪切)并可以在影像上準確地了解到剖面的位置,截取出的剖面點云清晰,直觀。在本項目中由于橋墩是圓柱形,因此得到的剖面點云是一個圓形。將橋墩不同高程面上的剖面圓繪制出來以后就可以利用其圓心坐標進行橋墩的偏移量計算了。若是需要測量橋拱的線性,只需要將剖面方向進行改動就可以迅速得到需要的剖面點云。
在截取了需要的剖面點云之后,還可以利用MicroStation`里功能強大的三維建模工具對其進行相關運算,建立整個目標物的三維模型。如圖6。

>>圖4 橋拱線型
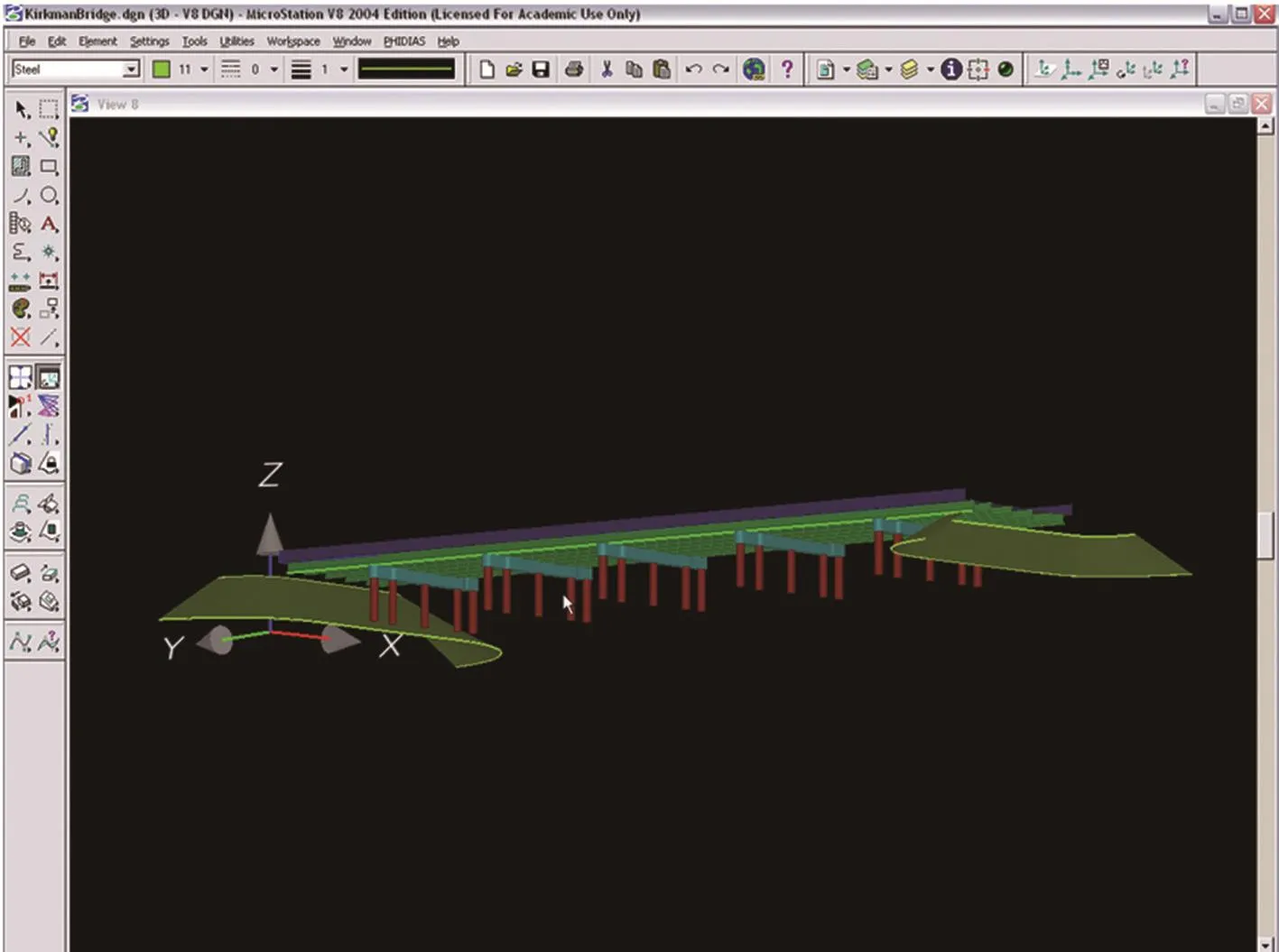
>>圖5 橋梁三維模型
創新.協作
水利水電工程是一項巨大的工程,包括前期勘探、測繪、設計、施工等階段,對于測繪專業來說,其主要任務是提供場地的地形地貌情況供后續設計等單位使用。傳統的測繪無外乎全站儀、水準儀、GPS等單點位采集處理方法,對于一些常規區域的測繪,這種作業模式是完全可行的。但是在一些要求比較高的地方,如施工樞紐區、進出水口等地方就稍顯吃力,畢竟這些樞紐區域要求的精度更高、更細。而且隨著三維設計要求的提出,測繪單位今后提供的測繪產品不再是以往的二維線畫圖,還必須提供區域內三維地表模型,這就要求相關人員必須采用更新、更好的手段來改進作業方式,提高工作效率,滿足上游專業的要求。
在某水電站前期勘探過程中,利用RIEGL LMS-Z420i地面三維激光掃描儀對壩址樞紐區進行了全景掃描,采集了第一手的壩址區點云數據。由于每個設站采集到的點云范圍是有限的,對大場景區域來說,多站數據的拼接也是一個研究的熱點。現在比較流行的是ICP(Iterative Closest Point)迭代最近點算法,該算法采用點集對點集的迭代方法,可以擬合出相應的曲面。RIEGL的處理軟件中也對其進行了補充,即使用4對以上同名點的相關聯就可以將相鄰兩個設站的點云數據進行拼接,同時提供拼接誤差以供分析。在采集到的數以億計的點云中,有工作人員需要的地表點,也有很多噪音點和植被點,這些點對后續建模都是沒有用的,必須加以刪除。對飛離于地表面的離散噪音點,一般通過手工刪除就可以了,但是對植被點就需要通過一定的算法處理才能消除。現有的植被剔除方法基本上都是迭代刪除法,其基本原理是在主體點云表面建立一個初始模型,利用點云與模型間的距離差值與設定好的閾值進行比較,如果差值大于給定的閾值,則將該點判定為植被點并進行刪除;否則就將該點視為地表點加以保留。通過逐步減小設定的閾值可以將地表面植被逐步刪除干凈。
經預處理在得到完整的壩址區地表點云之后就可以導入Micro station經三角網構建該區域的表面模型,并通過紋理映射將采集到的影像粘貼到模型表面得到紋理模型。該模型的基礎仍然是三角網模型,但是添加了影像信息,效果更加直觀。
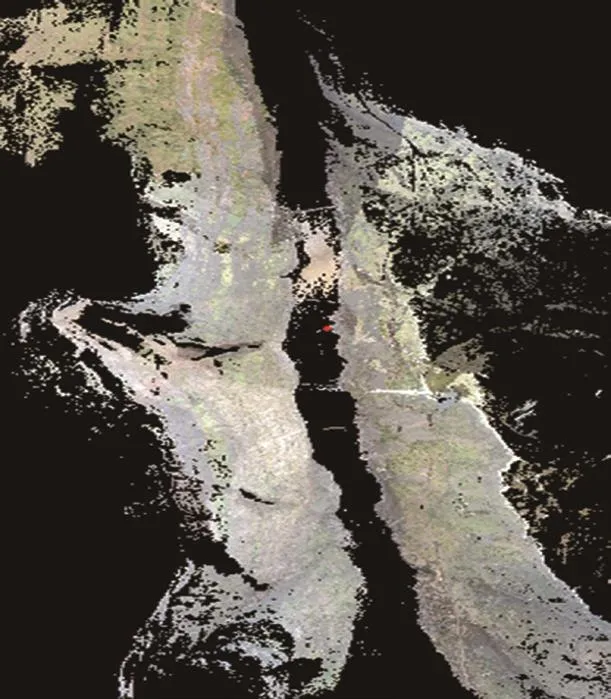
>>圖6 某水電站壩址區彩色點云模型
在后續的水利水電施工過程中,激光掃描儀也大有可為,例如:隧洞開挖檢測、滑坡體變形監測等,都可以利用激光掃描儀對其進行處理分析。
通過上述幾個工程實例可以看出:以地面三維激光掃描儀采集目標物表面三維點云數據為基礎,充分利用激光點云的三維坐標屬性進行相關計算分析才是激光掃描點云應用的精髓。我們可以直接利用點云坐標進行基于數值的相關分析;也可以利用點云構建目標物三維模型,這樣的話,后續分析處理的平臺也由點轉為了面、體模型。這樣的數據加工可以擴大點云數據應用的范疇,后續分析的手段也得到相應的增加,產品形式也會更加豐富,相比于常規測量方法,激光掃描作業模式更經濟、更高效、具有更高的作業安全系數。
在LIDAR領域,“點云提供精度、影像提供解析力”,在點云的基礎上加上相關影像,產品形式會更多樣化,比如正射影像、紋理模型等。這些數據的基礎仍然是點云、影像、DEM等,但在成果可視化效果上會更直觀、更有力。
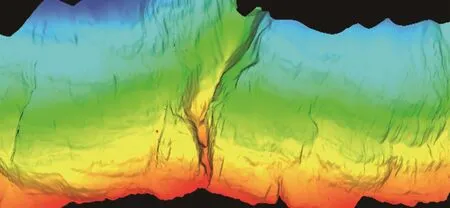
>>圖7 經MicroStation三角化的壩址區DEM

>>圖8 壩址區紋理模型
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00