低速風(fēng)洞模型振動(dòng)主動(dòng)控制仿真研究
2014-09-05 07:33:34陳陸軍
振動(dòng)與沖擊 2014年5期
王 學(xué), 陳陸軍, 黃 勇, 孔 鵬
(1.中國空氣動(dòng)力研究與發(fā)展中心 空氣動(dòng)力學(xué)國家重點(diǎn)實(shí)驗(yàn)室, 四川 綿陽 621000;2.中國空氣動(dòng)力研究與發(fā)展中心低速所, 四川 綿陽 621000)
中國空氣動(dòng)力研究與發(fā)展中心4 m×3 m風(fēng)洞是我國大型低速主力風(fēng)洞,風(fēng)洞配備的彎刀尾撐機(jī)構(gòu)和大迎角尾撐機(jī)構(gòu)均采用懸臂方式支撐模型,如圖1和圖2。在外載荷(重力和非定常氣動(dòng)力)作用下,懸臂支撐在前端通常產(chǎn)生較大的位移。在大迎角等氣動(dòng)分離較為劇烈的狀態(tài)下,懸臂前端的模型產(chǎn)生大幅的振動(dòng)[1]。風(fēng)洞試驗(yàn)中,模型的振動(dòng)首先危害到氣動(dòng)試驗(yàn)數(shù)據(jù)的精準(zhǔn)度,這將對(duì)飛行器后續(xù)的工作產(chǎn)生深遠(yuǎn)的影響,甚至危及我軍戰(zhàn)斗力的生成。模型的振動(dòng)嚴(yán)重時(shí)還危及試驗(yàn)設(shè)備和人員的安全,縮短設(shè)備使用壽命,造成系統(tǒng)故障率上升[2]。

圖1 4 m×3 m風(fēng)洞彎刀尾撐系統(tǒng)
風(fēng)洞模型振動(dòng)控制分為主動(dòng)和被動(dòng)兩種方法。國內(nèi)風(fēng)洞在振動(dòng)主動(dòng)和被動(dòng)控制方面均進(jìn)行了探索研究[2-4]。風(fēng)洞試驗(yàn)的試驗(yàn)對(duì)象各異、試驗(yàn)狀態(tài)多樣,造成風(fēng)洞試驗(yàn)中模型振動(dòng)特性各異。因此,適應(yīng)性較強(qiáng)的主動(dòng)控制越來越受到風(fēng)洞振動(dòng)控制研究者的關(guān)注,國外ETW風(fēng)洞和NASA風(fēng)洞均研究了模型的主動(dòng)抑振[5-6],獲得了較好的效果。
本文針對(duì)4 m×3 m風(fēng)洞開展模型振動(dòng)主動(dòng)控制技術(shù)研究,提出了相應(yīng)的主動(dòng)抑制方案,并對(duì)各主動(dòng)控制方案進(jìn)行了有限元方法(FEM)動(dòng)力學(xué)仿真分析。第1節(jié)對(duì)低速風(fēng)洞尾撐裝置進(jìn)行了有限元(FE)建模,進(jìn)而分析了尾撐裝置的動(dòng)力學(xué)特性。第2節(jié)針對(duì)4 m×3 m風(fēng)洞尾撐置裝提出了振動(dòng)的主動(dòng)控制方法。第3節(jié)給出了尾撐裝置振動(dòng)主動(dòng)控制FEM仿真方法,以及控制力的光滑預(yù)測(cè)方法。第4節(jié)對(duì)FEM仿真計(jì)算結(jié)果進(jìn)行了對(duì)比及分析。第5節(jié)給出了4 m×3 m風(fēng)洞尾撐裝置振動(dòng)主動(dòng)控制FEM仿真結(jié)論。

圖2 4 m×3 m風(fēng)洞大迎角尾撐系統(tǒng)
1 低速風(fēng)洞尾撐裝置FEM分析
1.1 FEM建模
為便于仿真計(jì)算,在不影響結(jié)構(gòu)主要?jiǎng)恿W(xué)特征的條件下,對(duì)4 m×3 m風(fēng)洞尾撐裝置進(jìn)行了FEM簡化。簡化后采用ANSYS軟件建立4 m×3 m風(fēng)洞尾撐裝置FEM模型,采用四面體進(jìn)行網(wǎng)格劃分,在各連接界面進(jìn)行網(wǎng)格加密處理。計(jì)算網(wǎng)格節(jié)點(diǎn)數(shù)為10.1萬,單元數(shù)為5.2萬,計(jì)算網(wǎng)格和坐標(biāo)系如圖3所示。
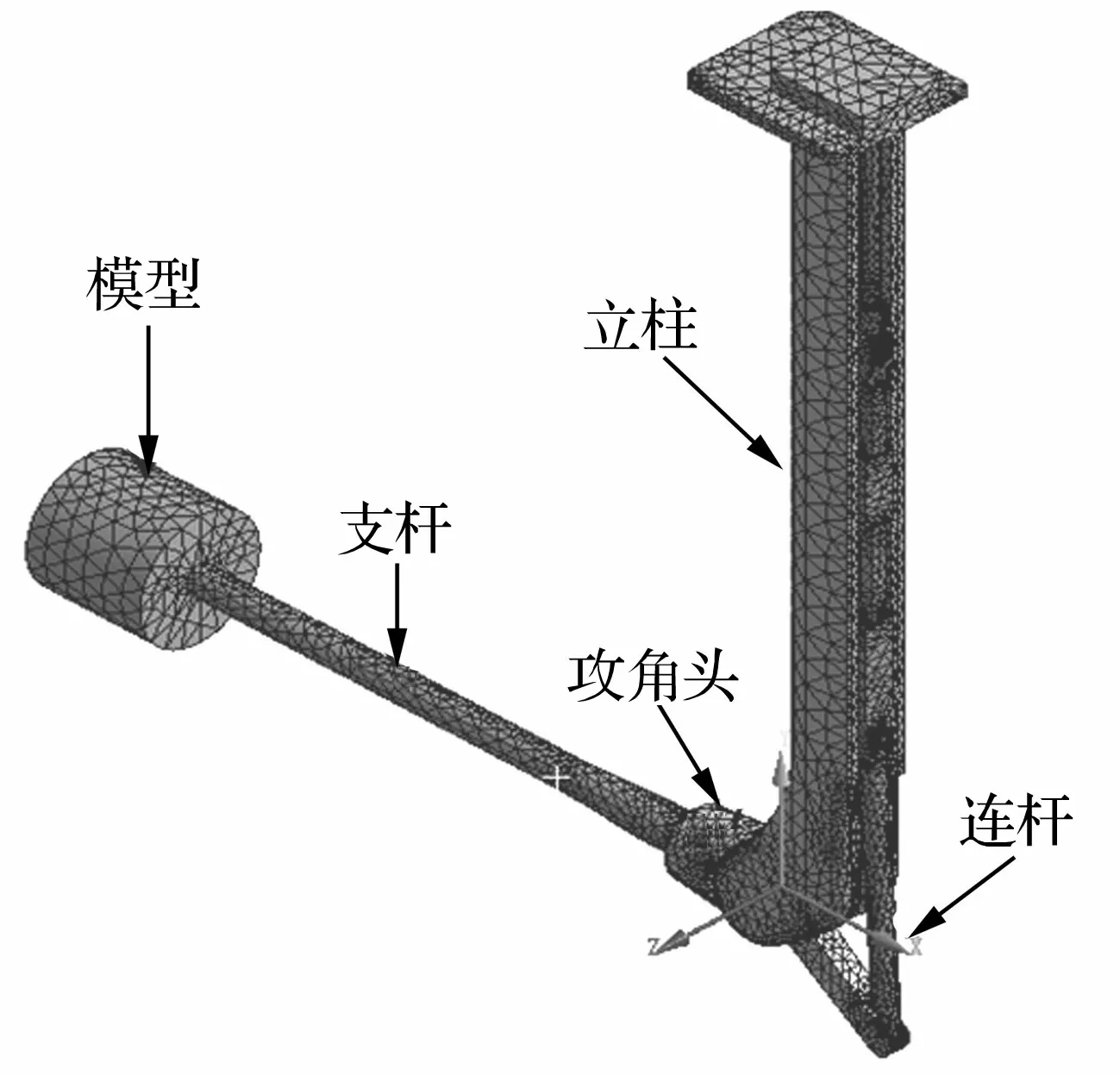
圖3 4 m×3 m風(fēng)洞尾撐裝置FEM模型
1.2 模態(tài)分析
模態(tài)分析結(jié)果如表1和圖4所示,一階模態(tài)為模型和尾支桿的橫向運(yùn)動(dòng),二階模態(tài)為模型和尾支桿的俯仰運(yùn)動(dòng),三階模態(tài)為模型、尾支桿和大臂的橫向運(yùn)動(dòng)。

表1 4 m×3 m風(fēng)洞尾撐裝置固有頻率
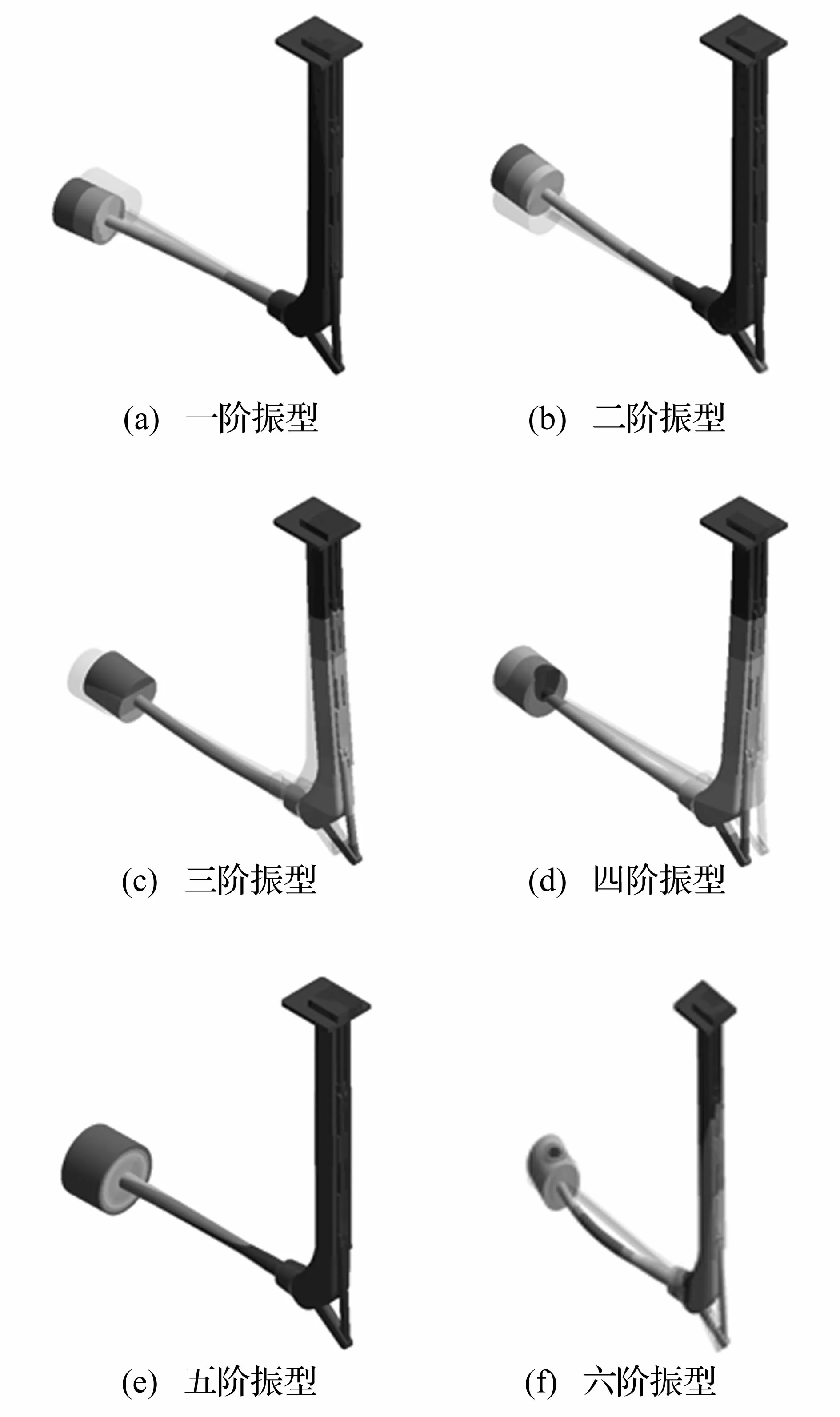
圖4 4 m×3 m風(fēng)洞尾撐裝置各階振型
1.3 瞬態(tài)動(dòng)力學(xué)分析
基于1.2節(jié)的模態(tài)分析結(jié)果,采用模態(tài)疊加法,對(duì)未施加振動(dòng)控制措施的尾撐裝置進(jìn)行了瞬態(tài)動(dòng)力學(xué)分析。氣動(dòng)載荷采用某型典型戰(zhàn)機(jī)風(fēng)洞試驗(yàn)獲得的天平載荷數(shù)據(jù),如圖5所示。計(jì)算時(shí)間步長取為Δt=1.0×10-3s。模型前端點(diǎn)Y向位移時(shí)間歷程如圖10和圖13中黑細(xì)實(shí)線所示。
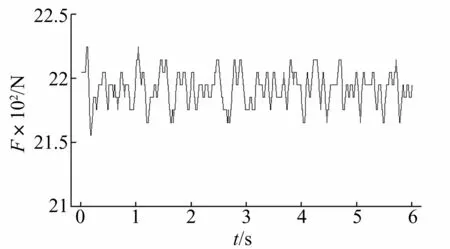
圖5 氣動(dòng)載荷
2 尾撐裝置振動(dòng)主動(dòng)控制方案
2.1 振動(dòng)主動(dòng)控制原理
振動(dòng)主動(dòng)控制方法原理是,傳感器實(shí)時(shí)采集的結(jié)構(gòu)響應(yīng)或環(huán)境干擾量,控制器采用一定的控制算法計(jì)算出所需的控制力,執(zhí)行機(jī)構(gòu)(作動(dòng)器)將控制力施加于結(jié)構(gòu)上,如此循環(huán)以達(dá)到振動(dòng)控制的效果[7]。施加了主動(dòng)控制力的結(jié)構(gòu)動(dòng)力學(xué)FE方程如下:
(1)

(2)
式中,ξ、λ和κ分別為位移、速度和加速度反饋控制參數(shù)。對(duì)比式(1)和式(2)可知,控制力fctr等效于改變?cè)Y(jié)構(gòu)的質(zhì)量矩陣、阻尼矩陣和剛度矩陣,以達(dá)到改變結(jié)構(gòu)動(dòng)力學(xué)響應(yīng)特性、消耗振動(dòng)能量,最終實(shí)現(xiàn)振動(dòng)控制的效果。
2.2 尾撐裝置振動(dòng)主動(dòng)控制方案
針對(duì)4 m×3 m風(fēng)洞尾撐裝置特點(diǎn),可采用天平信號(hào)或加速度計(jì)信號(hào)作為信號(hào)反饋,采用壓電陶瓷堆作為執(zhí)行機(jī)構(gòu)核心部件。主動(dòng)控制作用點(diǎn)的選擇有兩種方案:支桿前端控制和支桿后端控制。支桿前端/后端控制是在支桿靠近模型/立柱一端繞支桿布置數(shù)量不等的壓電陶瓷堆施加控制力。支桿后端控制方案壓電陶瓷堆安裝方式如圖6所示,支桿前端控制方案與此類似,控制方案的原理如圖7所示。根據(jù)圖6和圖7,尾撐裝置振動(dòng)的主動(dòng)控制原理是通過傳感器采集并反饋模型的振動(dòng)信號(hào),控制模塊據(jù)此計(jì)算并輸出控制命令,控制點(diǎn)安裝的壓電陶瓷根據(jù)控制命令輸出控制力(亦即控制彎矩),以此循環(huán)往復(fù),以達(dá)到抑制模型振動(dòng)的目的。
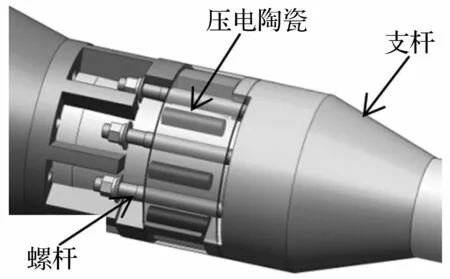
圖6 壓電陶瓷堆安裝示意圖
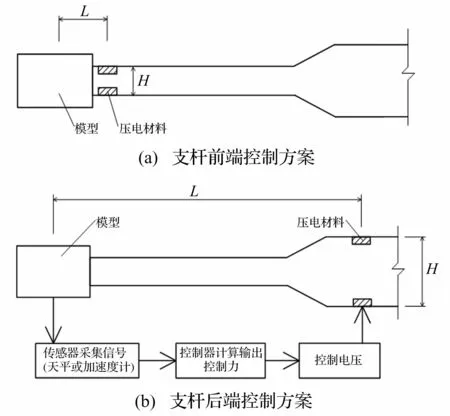
圖7 風(fēng)洞尾撐裝置主動(dòng)控制原理圖
3 尾撐裝置振動(dòng)主動(dòng)控制FEM仿真
3.1 FEM仿真方法
為了進(jìn)行尾撐裝置振動(dòng)主動(dòng)控制FEM仿真,在控制點(diǎn)處支桿上下表面分別施加大小相等、方向相反的集中力,從而等效于在控制點(diǎn)施加了一個(gè)主動(dòng)力矩,以此模擬壓電陶瓷堆的作用力,如圖8所示。仿真過程中,控制力隨反饋的結(jié)構(gòu)響應(yīng)實(shí)時(shí)變化。為了便于對(duì)比分析,本文在仿真過程采用線性主動(dòng)控制,即主動(dòng)控制力隨反饋信號(hào)線性變化,而控制參數(shù)ξ、λ和κ不隨時(shí)間變化。
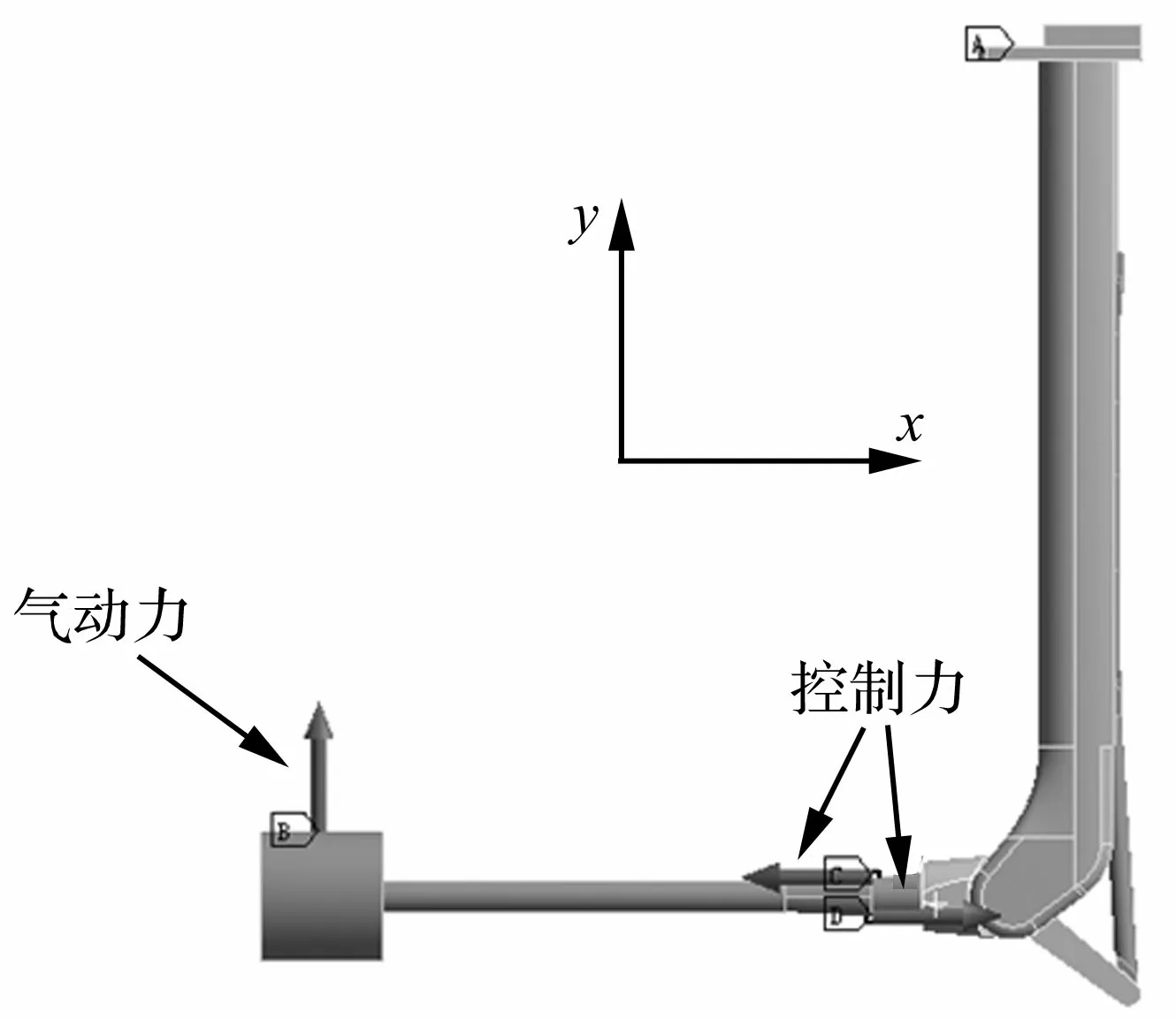
圖8 主動(dòng)控制FEM仿真示意圖
根據(jù)結(jié)構(gòu)動(dòng)力學(xué)原理,位移反饋和加速度反饋控制力等效于移動(dòng)了結(jié)構(gòu)的固有頻率,對(duì)于窄頻外載荷較為有效。在風(fēng)洞試驗(yàn)中,氣動(dòng)載荷通常為寬頻載荷,因此在仿真中僅使用了速度反饋控制力,即:
(3)
在FEM仿真中,上一時(shí)間步的結(jié)構(gòu)響應(yīng)計(jì)算結(jié)果作為當(dāng)前時(shí)間步控制力的計(jì)算依據(jù)。本文基于ANSYS APDL編程語言進(jìn)行有限元仿真,在瞬態(tài)動(dòng)力計(jì)算中采用模態(tài)疊加法。在ANSYS中采用模態(tài)疊加法時(shí),求解過程輸出的計(jì)算結(jié)果只包括模態(tài)參數(shù),為了提取節(jié)點(diǎn)速度需在每個(gè)時(shí)間步求解完成后調(diào)用后處理程序,然后采用“重新啟動(dòng)”模式進(jìn)行計(jì)算。本文采用的APDL程序流程如圖9所示,圖9 中虛線方框內(nèi)為相應(yīng)模塊使用的主要APDL命令。
3.2 主動(dòng)控制力的平滑預(yù)測(cè)方法
在主動(dòng)控制有限元仿真計(jì)算中,結(jié)構(gòu)響應(yīng)反饋信號(hào)中通常包含高頻信號(hào),直接據(jù)此生成控制力,控制效果較差,嚴(yán)重時(shí)會(huì)導(dǎo)致高頻振動(dòng)的發(fā)散。為此,需要對(duì)主動(dòng)控制力進(jìn)行平滑處理,本文采用的方案是:提取當(dāng)前時(shí)刻tn之前的n步計(jì)算結(jié)果進(jìn)行線性平滑處理[8],然后預(yù)測(cè)下一時(shí)刻tn+Δt的結(jié)構(gòu)響應(yīng)變量,并據(jù)此計(jì)算主動(dòng)控制力。
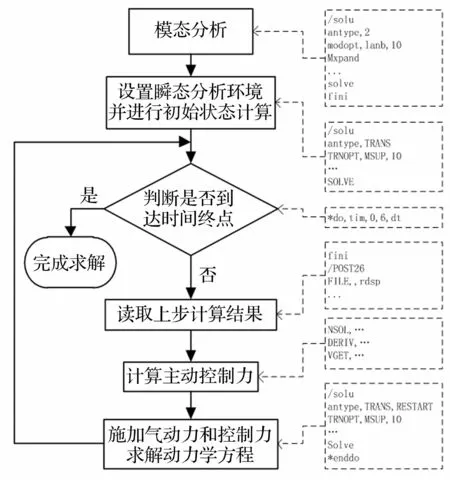
圖9 APDL程序流程
令在tn之前n個(gè)時(shí)間步t1,t2,…,tn的結(jié)構(gòu)響應(yīng)值為y1,y2,…,yn。線性平滑處理即為選取參數(shù)a,b使得各點(diǎn)關(guān)于直線方程:
y=a+bt
(4)
的誤差平方和最小,亦即:
(5)
從而獲得關(guān)于參數(shù)a,b的方程組:
(6)
解得:
(7)
其中,

(8)

(9)

4 FEM仿真計(jì)算結(jié)果及分析
根據(jù)第2節(jié)提出的主動(dòng)控制方案和第3節(jié)給出的FEM仿真方法,分別對(duì)支桿前端和后端控制進(jìn)行了FEM瞬態(tài)動(dòng)力學(xué)仿真分析。仿真過程中主動(dòng)控制力隨結(jié)構(gòu)響應(yīng)實(shí)時(shí)反饋,控制力按式(3)進(jìn)行計(jì)算,與結(jié)構(gòu)響應(yīng)呈線性關(guān)系。
4.1 支桿后端控制方案FEM仿真
對(duì)于支桿后端控制方案,分別對(duì)控制參數(shù)λ=0.2,0.35,0.5,0.8,1.0,1.5,2.0等情形進(jìn)行了FEM瞬態(tài)動(dòng)力學(xué)仿真分析。圖10給出了λ=0.35和λ=2.0時(shí)模型前端點(diǎn)的y向振動(dòng)位移時(shí)間歷程,圖11和圖12分別對(duì)各控制參數(shù)條件下y向振動(dòng)位移、控制力的時(shí)間歷程進(jìn)行了對(duì)比。從上述計(jì)算結(jié)果可以看到,該支桿后端控制方案能夠有效抑制結(jié)構(gòu)的振動(dòng)。隨著控制參數(shù)λ的增大,結(jié)構(gòu)低頻振動(dòng)衰減加快,同時(shí)控制力峰值亦顯著增大。
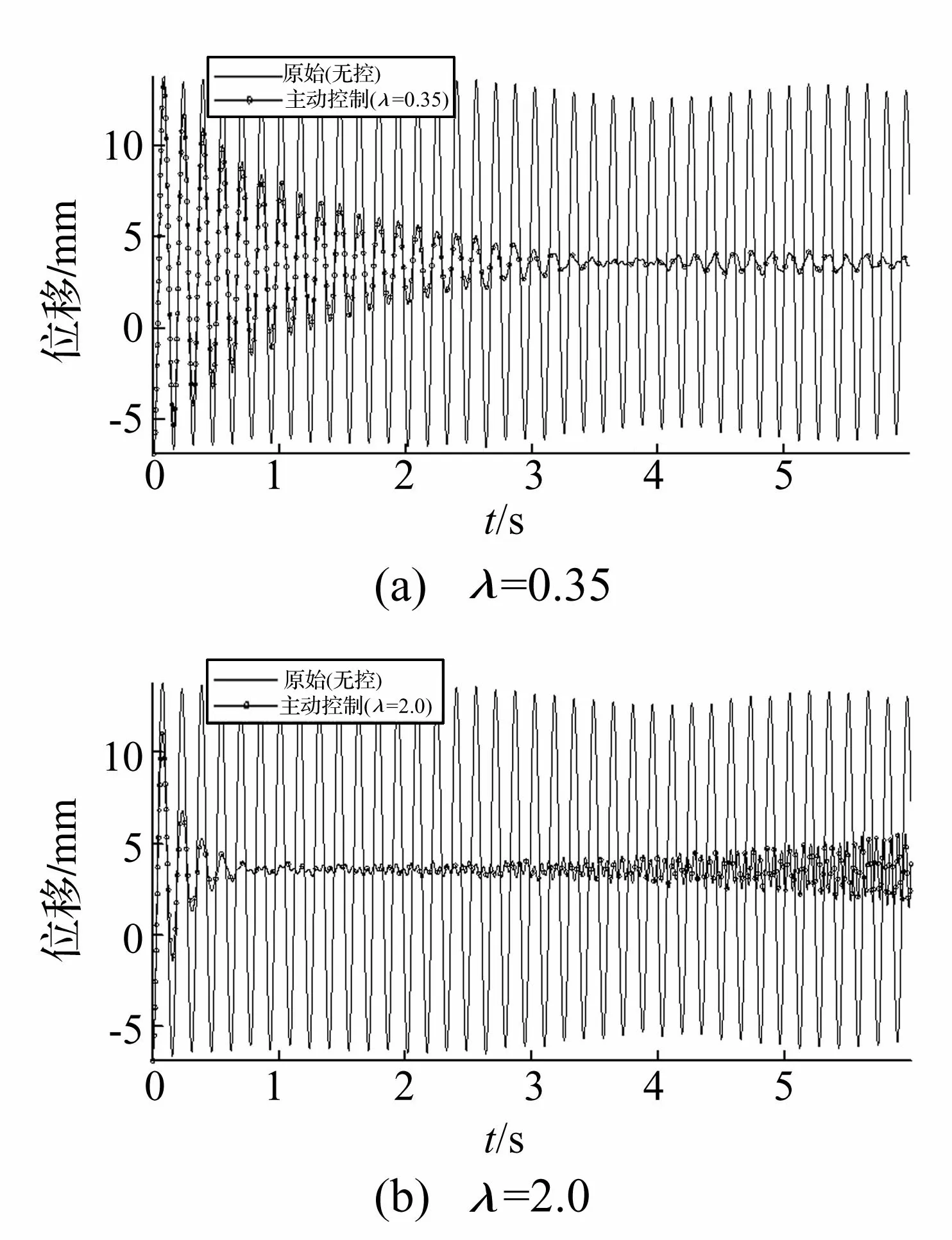
圖10 后端控制方案位移時(shí)間歷程
由圖10和圖11可知,當(dāng)λ≥0.35時(shí),隨著λ的增大,結(jié)構(gòu)高頻振動(dòng)(三階模態(tài))被逐漸激發(fā);當(dāng)λ>1.0時(shí),高頻振動(dòng)趨于發(fā)散,振動(dòng)惡化。從圖12可知,隨著高頻振動(dòng)發(fā)散,控制力亦趨于發(fā)散。造成該現(xiàn)象的原因分析:支桿后端控制方案的控制點(diǎn)位于整個(gè)尾撐裝置中間部位,根據(jù)1.2節(jié)模態(tài)分析結(jié)果,此處的振動(dòng)主要受到高階振型的影響,因此在此處施加的控制載荷也易于激發(fā)高頻模態(tài)響應(yīng)。可見,支桿后端控制方案需選擇恰當(dāng)?shù)乃俣确答伩刂茀?shù),即在振幅較大時(shí)可選用較大的速度反饋控制參數(shù),而當(dāng)振幅大幅衰減后應(yīng)選用較小的速度控制參數(shù),以免激發(fā)高頻振動(dòng)。
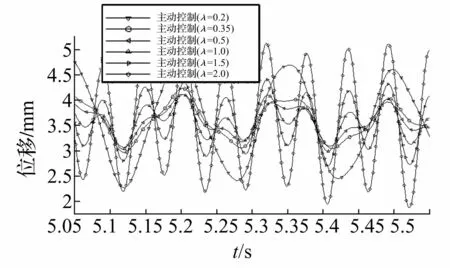
圖11 后端控制方案不同控制參數(shù)位移對(duì)比
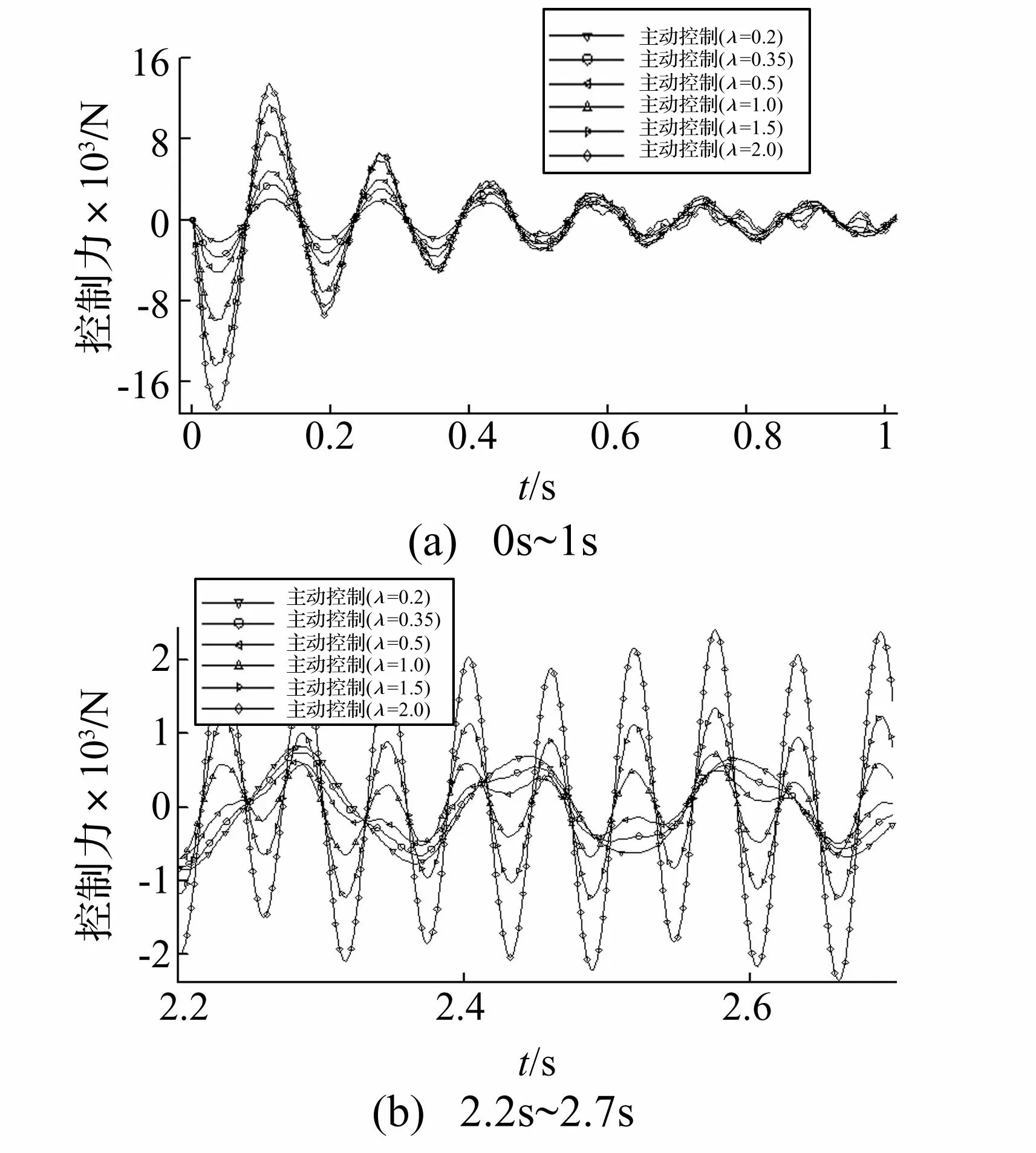
圖12 后端控制方案控制力時(shí)間歷程
根據(jù)仿真計(jì)算結(jié)果,控制參數(shù)λ=0.2,0.35,0.5,0.8,1.0時(shí),支桿后端控制方案最大主動(dòng)控制力分別為2 126 N,3 668 N,5 167 N,8 059 N,9 941 N,而振幅衰減85%所用時(shí)間分別為3.5 s,2.7 s,1.6 s,1.0 s,0.8 s。
4.2 前端控制方案FEM仿真
對(duì)于支桿前端控制方案,分別對(duì)控制參數(shù)λ=0.5,2.0,5.0,20.0等情形進(jìn)行了FEM瞬態(tài)動(dòng)力學(xué)仿真分析。模型前端點(diǎn)的y向振動(dòng)位移和主動(dòng)控制力的時(shí)間歷程如圖13和圖14所示。從仿真計(jì)算結(jié)果可以看到,該前端控制方案能夠使結(jié)構(gòu)振動(dòng)快速衰減。隨著控制參數(shù)λ的增大,結(jié)構(gòu)低頻振動(dòng)衰減加快,而控制力峰值亦快速增長。
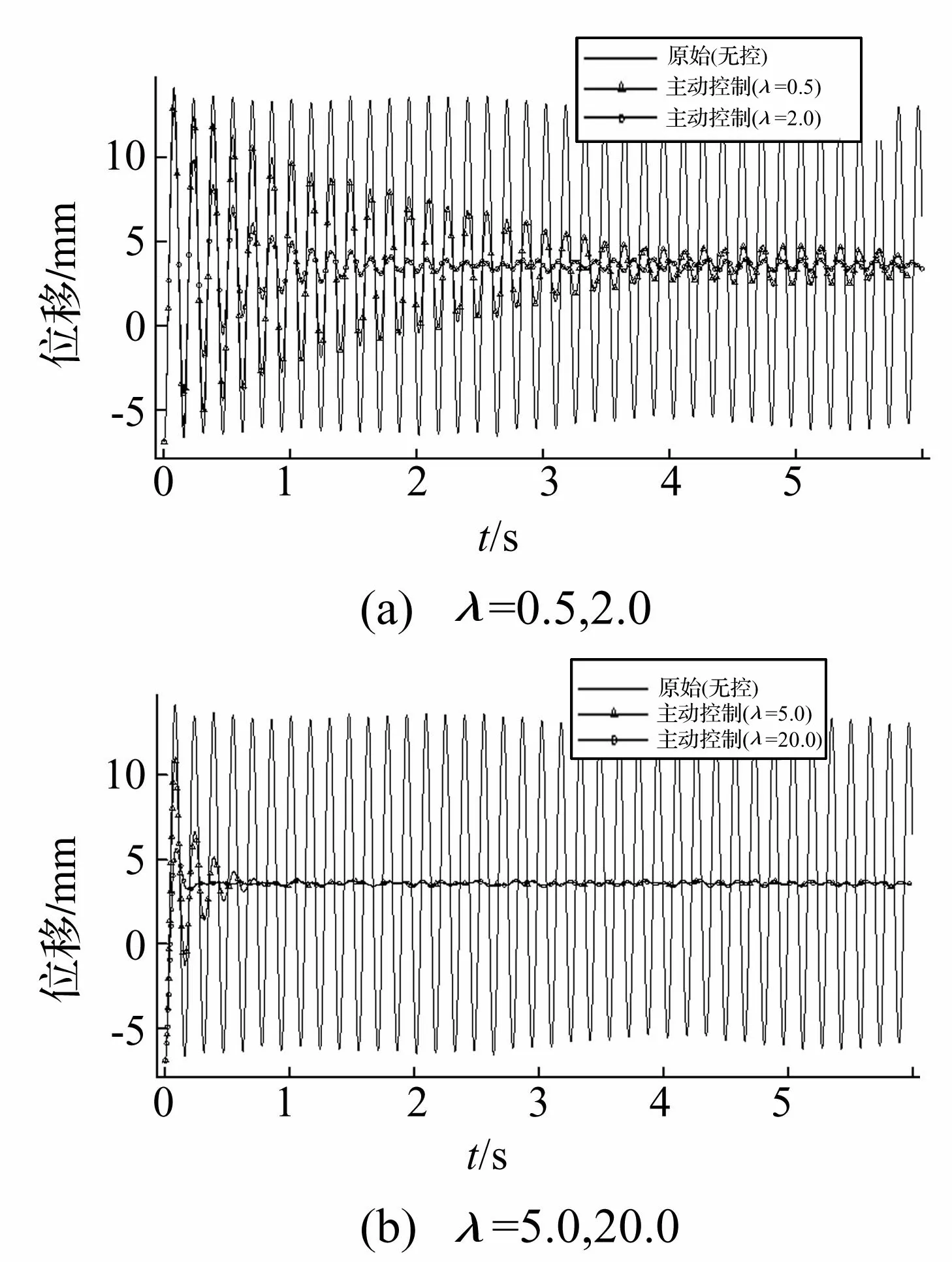
圖13 支桿前端控制方案位移時(shí)間歷程
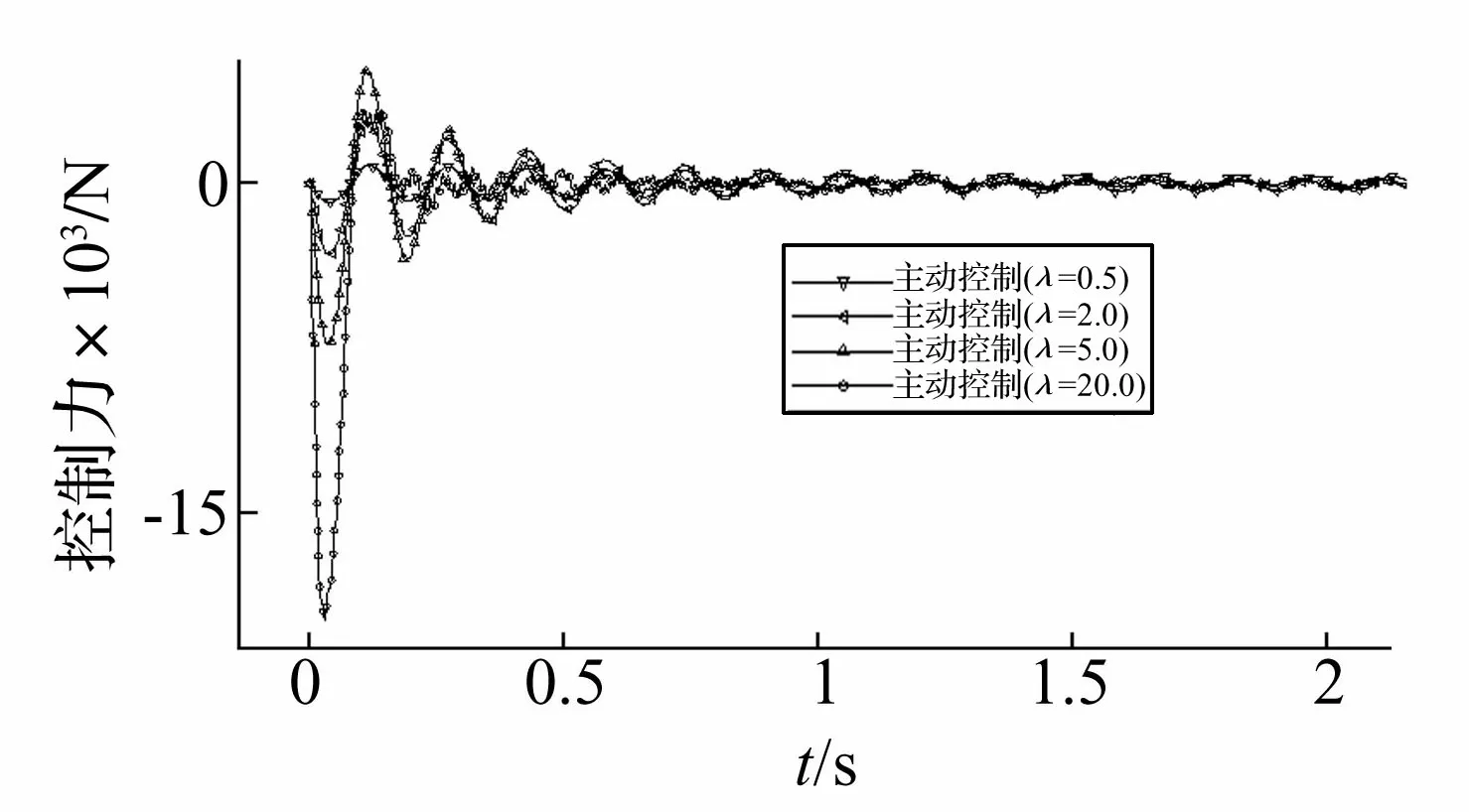
圖14 支桿前端控制方案控制力時(shí)間歷程
與第4.1節(jié)所給出的支桿后端控制方案計(jì)算相比,前端控制方案沒有出現(xiàn)高頻振動(dòng)發(fā)散的情況。其原因是,前端控制方案控制點(diǎn)位于整個(gè)尾撐裝置的前端,對(duì)于y向運(yùn)動(dòng),此處受高階振型的影響甚微,因此在此處施加控制力不會(huì)激發(fā)高頻模態(tài)響應(yīng)發(fā)散。
根據(jù)仿真計(jì)算結(jié)果,該前端控制主動(dòng)抑振方案效果明顯,控制參數(shù)λ=0.5,1.0,2.0,3.0,5.0時(shí),最大主動(dòng)控制力分別為850 N,1 668 N,3 214 N,4 648 N,7 277 N,而振幅衰減85%所用時(shí)間分別為3.5 s,2.1 s,1.0 s,0.6 s,0.4 s。
4.3 對(duì)比分析
以振幅衰減85%所用時(shí)間表示振動(dòng)控制效果,支桿前端和后端控制方案的振動(dòng)控制效果與控制力峰值對(duì)應(yīng)關(guān)系如圖15所示。由圖可知,振動(dòng)控制效果相同時(shí),支桿前端控制方案所需的控制力顯著低于支桿后端控制方案。因此,支桿前端控制方案是更為經(jīng)濟(jì)的方案。另外,根據(jù)4.1節(jié)和4.2節(jié)的分析,支桿前端控制的方案不會(huì)激發(fā)高頻振動(dòng),而支桿后端控制方案在使用較大的速度反饋控制參數(shù)時(shí)會(huì)激發(fā)高頻振動(dòng),導(dǎo)致振動(dòng)惡化。綜上所述,在工程許可的條件下,支桿前端控制方案為優(yōu)選方案。
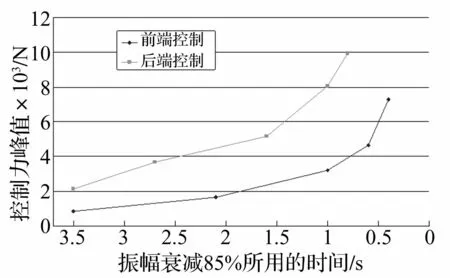
圖15 方案效果對(duì)比
5 結(jié) 論
本文針對(duì)中國空氣動(dòng)力研究與發(fā)展中心4 m×3 m風(fēng)洞尾撐裝置進(jìn)行了振動(dòng)主動(dòng)控制研究,提出了支桿前端或后端控制兩種方案,基于有限元模態(tài)疊加法對(duì)兩種方案進(jìn)行了仿真分析。對(duì)比了兩種方案的控制效果,為風(fēng)洞尾撐裝置振動(dòng)控制方案選擇提供了支持。
參 考 文 獻(xiàn)
[1]惲起麟. 實(shí)驗(yàn)空氣動(dòng)力學(xué)[M]. 北京:國防工業(yè)出版社, 1994.
[2]梁 鑒,張衛(wèi)國,王勛年,等. 4 m×3 m風(fēng)洞無人機(jī)模型振動(dòng)抑制系統(tǒng)研制[J].實(shí)驗(yàn)流體力學(xué), 2004,21(4):65-70.
LIANG Jian, ZHANG Wei-guo, WANG Xun-nian, et al. Development for restraining oscillation device of the UAV model in the 4 m×3 m wind tunnel[J]. Experiments and Measure in Fluid Mechanics, 2004, 21(4):65-70.
[3]陳衛(wèi)東,邵敏強(qiáng),楊興華,等. 跨聲速風(fēng)洞測(cè)力模型主動(dòng)減振系統(tǒng)的試驗(yàn)研究[J].振動(dòng)工程學(xué)報(bào), 2007, 20(1),181-186.
CHEN Wei-dong, SHAO Min-qiang, YANG Xing-hua, et al. Experimental evaluation of an active vibration control system for wind tunnel aerodynamic models[J]. Journal of Vibration Engineering, 2007, 20(1),181-186.
[4]王 亮,陳懷海,賀旭東,等. 懸臂梁振動(dòng)非接觸式磁力主動(dòng)控制研究[J]. 振動(dòng)與沖擊, 2010, 29(7):94-98.
WANG Liang, CHEN Huai-hai,HE Xu-dong,et al. Vibration active control for a cantilever beam with a noncontact magnetic force[J]. Journal of Vibration and Shock, 2010, 29(7), 94-98.
[5]Balakrishna S. Development of a wind tunnel active vibration reduction system[J]. AIAA 2007-961. 45th AIAA Aerospace Sciences Meeting and Exhibit, 8-11 January, 2007, Reno, Nevada.
[6]Fehren H, Hefer G. Validation testing with the active damping system in the european transonic windtunnel, AIAA-2001-0610. 39th AIAA Aerospace Sciences Meeting & Exhibit, 8-11 January 2001, Reno, Nevada.
[7]鄒經(jīng)湘,于開平. 結(jié)構(gòu)動(dòng)力學(xué)[M]. 哈爾濱:哈爾濱工業(yè)大學(xué)出版社, 2009.04.
[8]《數(shù)學(xué)手冊(cè)》編寫組. 數(shù)學(xué)手冊(cè). 北京:高等教育出版社, 2010.12.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:44