含間隙高速多連桿傳動(dòng)機(jī)構(gòu)動(dòng)力學(xué)特性研究
2014-09-07 07:31:38張?jiān)隼?/span>巫世晶趙文強(qiáng)王曉筍
振動(dòng)與沖擊 2014年14期
關(guān)鍵詞:模型
張?jiān)隼冢资谰Вw文強(qiáng),2,王曉筍
(1.武漢大學(xué) 動(dòng)力與機(jī)械學(xué)院,武漢 430072;2.河南平高電氣股份有限公司,河南 平頂山 467001)
間隙作為機(jī)械系統(tǒng)典型特征對(duì)高速重載傳動(dòng)機(jī)構(gòu)運(yùn)動(dòng)學(xué)及動(dòng)力學(xué)響應(yīng)會(huì)產(chǎn)生深度影響,使傳動(dòng)機(jī)構(gòu)呈現(xiàn)強(qiáng)烈非線性振動(dòng)特性。對(duì)含轉(zhuǎn)動(dòng)副間隙機(jī)構(gòu)進(jìn)行動(dòng)態(tài)特性研究前提為對(duì)其建立準(zhǔn)確、高效動(dòng)力學(xué)模型[1-2]。通過大量理論與實(shí)驗(yàn)研究探索轉(zhuǎn)動(dòng)副間隙對(duì)傳動(dòng)機(jī)構(gòu)動(dòng)態(tài)特性影響,并按不同假設(shè)形成不同的建模理論與方法,主要有三種,即基于接觸-分離的二狀態(tài)模型[3-5]、基于接觸-分離-碰撞的三狀態(tài)模型[6-9]及基于連續(xù)接觸的連續(xù)接觸模型[10-15]。連續(xù)接觸模型較簡(jiǎn)單,較難反映副元素間動(dòng)力學(xué)特性;三狀態(tài)模型較復(fù)雜,且不能求解接觸碰撞力;二狀態(tài)模型在模型精確性或求解難度均符合實(shí)際需要,在二狀態(tài)模型基礎(chǔ)上逐漸發(fā)展成為碰撞鉸模型[16]。
本文基于間隙矢量模型,考慮構(gòu)件制造、裝配誤差建立高速多連桿傳動(dòng)機(jī)構(gòu)含間隙轉(zhuǎn)動(dòng)副的碰撞鉸模型,并用非線性彈簧阻尼模型描述運(yùn)動(dòng)副元素法向接觸力與位移關(guān)系,用修正的庫(kù)倫摩擦模型描述運(yùn)動(dòng)副元素切向摩擦力與位移關(guān)系,建立該傳動(dòng)機(jī)構(gòu)動(dòng)力學(xué)模型,并嵌入ADAMS軟件,分析轉(zhuǎn)動(dòng)副間隙對(duì)該傳動(dòng)機(jī)構(gòu)動(dòng)力學(xué)特性影響。
1 動(dòng)力學(xué)建模
1.1 間隙矢量模型
將轉(zhuǎn)動(dòng)副間隙嵌入系統(tǒng)動(dòng)力學(xué)模型為含間隙機(jī)構(gòu)動(dòng)力學(xué)建模關(guān)鍵。本文用間隙矢量模型能合理描述轉(zhuǎn)動(dòng)副間隙并能將其引入系統(tǒng)動(dòng)力學(xué)模型,即在含間隙轉(zhuǎn)動(dòng)副中引入間隙矢量,并通過間隙矢量描述含間隙轉(zhuǎn)動(dòng)副元素間相對(duì)運(yùn)動(dòng)關(guān)系,相鄰構(gòu)件間精確相對(duì)位置變化用間隙矢量表示,可有效處理因構(gòu)件制造誤差所致連接點(diǎn)相對(duì)位置變化。

圖1 間隙矢量模型
間隙矢量定義在浮動(dòng)局部笛卡爾坐標(biāo)系中,起點(diǎn)為軸套中心,終點(diǎn)為軸頸中心,方向?yàn)檩S頸與軸套在機(jī)構(gòu)運(yùn)行中可能發(fā)生碰撞的點(diǎn),間隙矢量大小限制在以軸承中心為圓心的間隙圓內(nèi),間隙圓半徑為軸與軸承半徑之差,因此構(gòu)件的相對(duì)運(yùn)動(dòng)狀態(tài)可由間隙矢量大小變化反映,且亦能反映間隙運(yùn)動(dòng)副元素是否接觸,見圖1。
1.2 含間隙轉(zhuǎn)動(dòng)副模型
因制造誤差、裝配要求及磨損等因素,間隙不可避免存在于實(shí)際機(jī)械系統(tǒng)轉(zhuǎn)動(dòng)副中。間隙的存在使軸頸與軸套并非同心,會(huì)產(chǎn)生半徑方向的偏心距eij;因磨損、擠壓變形等,間隙變化呈隨機(jī)性,軸頸與軸套相對(duì)位置不會(huì)隨時(shí)確定,從而影響間隙轉(zhuǎn)動(dòng)副運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)行為,使分析變得復(fù)雜。為描述間隙動(dòng)態(tài)變化及不確定性所致動(dòng)力學(xué)影響,基于間隙矢量模型對(duì)間隙轉(zhuǎn)動(dòng)副建模。設(shè)相鄰構(gòu)件間只通過轉(zhuǎn)動(dòng)副連接,則間隙被定義為軸頸與軸套在配合位置的半徑差;認(rèn)為間隙轉(zhuǎn)動(dòng)副元素間存在分離、接觸及穿透三種狀態(tài)。含間隙轉(zhuǎn)動(dòng)副模型見圖2。
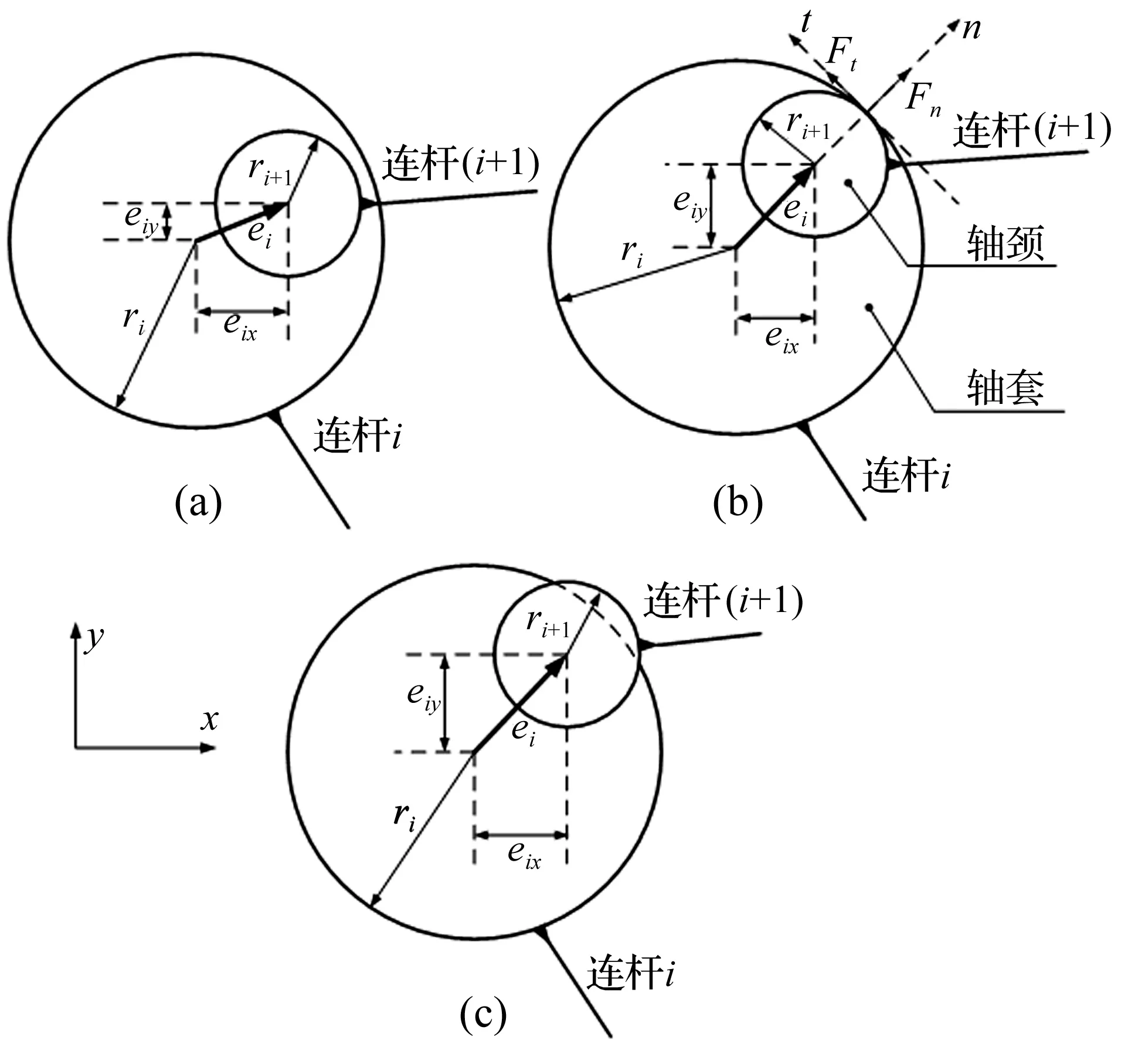
圖2 含間隙轉(zhuǎn)動(dòng)副模型
在圖2模型中,ei表示軸頸相對(duì)軸套偏心距,計(jì)算式為
(1)
徑向間隙為常量,定義為
c=ri-ri+1
(2)
式中:ri,ri+1分別為構(gòu)成轉(zhuǎn)動(dòng)副的軸套、軸頸半徑。
因碰撞產(chǎn)生的接觸變形可表示為
δi=ei-c
(3)
可據(jù)接觸變形大小確定轉(zhuǎn)動(dòng)副元素處于分離、接觸或穿透狀態(tài)。圖2 (a)為分離狀態(tài),此時(shí)軸頸與軸套并未接觸,軸頸可在軸套邊界內(nèi)自由運(yùn)動(dòng);圖2(b)為接觸狀態(tài),此時(shí)軸頸與軸套恰好接觸,為分離狀態(tài)結(jié)束或穿透狀態(tài)開始時(shí)刻;圖2(c)位穿透狀態(tài),此時(shí)軸頸與軸套間產(chǎn)生彈性變形,兩者時(shí)刻保持接觸。接觸碰撞法向力Fn與切向力Ft計(jì)算式為
(4)
式中:K為接觸剛度系數(shù);δn為接觸時(shí)軸頸與軸套相對(duì)穿透深度;m為非線性彈性接觸力指數(shù),與材料特性密切相關(guān);Cn,Ct分別為法向、切向粘滯阻尼系數(shù);f為摩擦系數(shù);Vt為副元素間相對(duì)滑移速度;sign(Vt)為滑移速度符號(hào)函數(shù),用于判斷摩擦力方向。
接觸剛度系數(shù)與接觸面形狀及物理屬性密切相關(guān),計(jì)算式為
(5)
(6)
式中:hk為與材料屬性相關(guān)系數(shù);μk,Ek分別為副元素所在構(gòu)件泊松比及彈性模量;ri,ri+1分別為接觸處副元素曲率半徑。
1.3 實(shí)際機(jī)構(gòu)動(dòng)力學(xué)建模
用間隙矢量模型建立轉(zhuǎn)動(dòng)副間隙動(dòng)力學(xué)模型后便可將其用于實(shí)際機(jī)械系統(tǒng)。本文研究某高壓斷路器中用于分合閘動(dòng)作的連桿驅(qū)動(dòng)機(jī)構(gòu),結(jié)構(gòu)簡(jiǎn)圖見圖3。驅(qū)動(dòng)力作用于接頭連桿1使其在水平滑槽內(nèi)運(yùn)動(dòng),經(jīng)中間桿件運(yùn)動(dòng)及傳遞力,通過動(dòng)觸頭連桿9與靜觸頭接觸碰撞,推動(dòng)靜觸頭運(yùn)動(dòng)至合閘位置,實(shí)現(xiàn)斷路器合閘動(dòng)作。
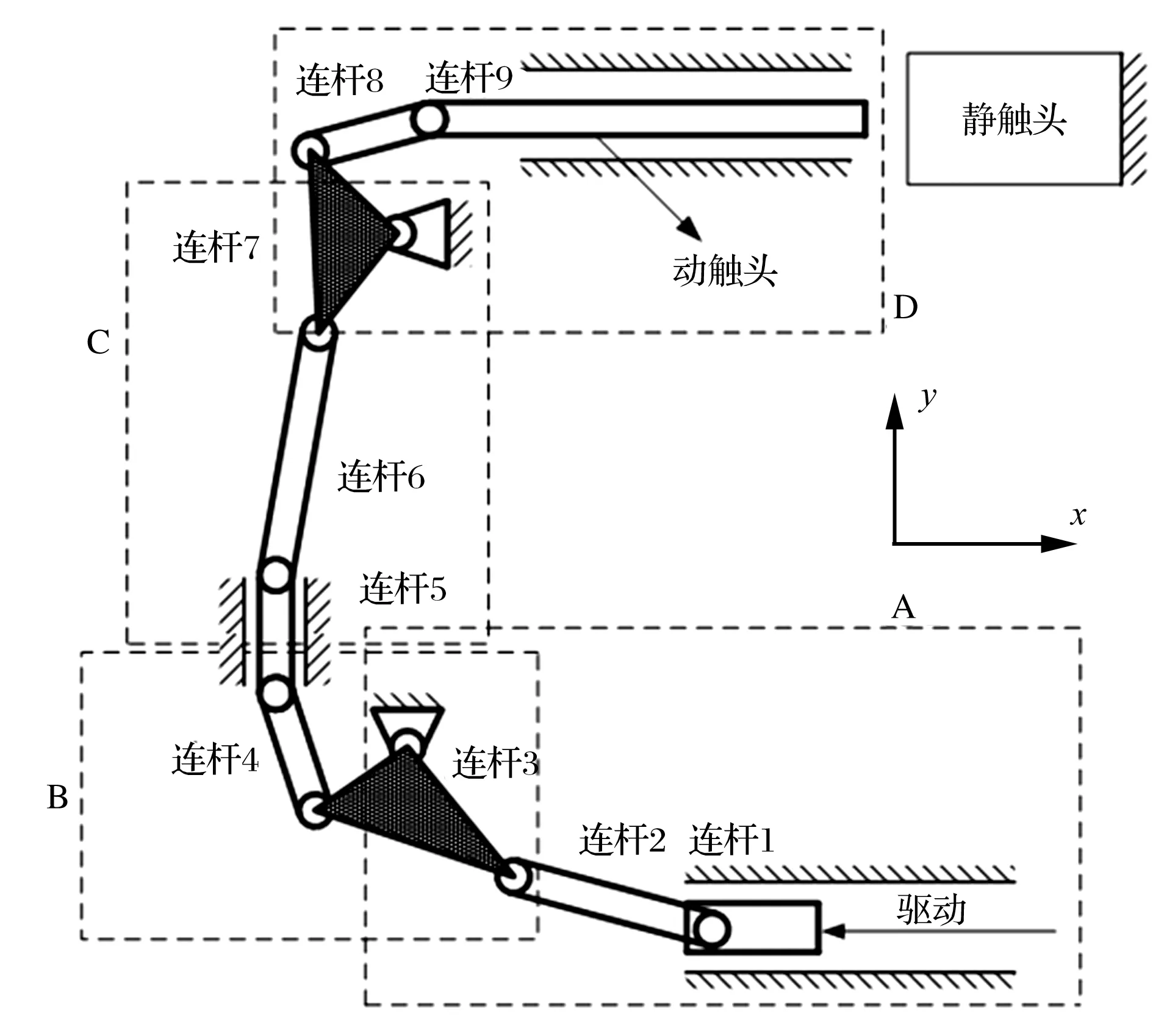
圖3 多桿傳動(dòng)機(jī)構(gòu)簡(jiǎn)圖
該機(jī)構(gòu)為具有1個(gè)自由度的平面10桿機(jī)構(gòu),包括兩定軸轉(zhuǎn)動(dòng)構(gòu)件連桿3、連桿7及3個(gè)只能平動(dòng)構(gòu)件連桿1、5、9,其余4構(gòu)件作平面運(yùn)動(dòng)。該機(jī)構(gòu)亦可分解為4個(gè)類似曲柄-滑塊機(jī)構(gòu)的子機(jī)構(gòu),分別為機(jī)構(gòu)A、B、C、D。分別對(duì)每個(gè)子機(jī)構(gòu)建立動(dòng)力學(xué)模型,通過公用參數(shù)將其聯(lián)合即可。
以機(jī)構(gòu)A為例,其局部放大帶轉(zhuǎn)動(dòng)副間隙模型見圖4。考慮3個(gè)轉(zhuǎn)動(dòng)副均存在間隙最復(fù)雜情況、不計(jì)移動(dòng)副與機(jī)架間摩擦建立動(dòng)力學(xué)方程。考慮單個(gè)或兩個(gè)間隙時(shí),只需在改組方程基礎(chǔ)上適當(dāng)簡(jiǎn)化即可。3桿件長(zhǎng)度分別為li(i=1,2,3),對(duì)應(yīng)質(zhì)量分別為mi(i=1,2,3),質(zhì)心位置分別為Si(i=1,2,3);軸頸半徑分別為Ri(i=1,2,3),軸頸與軸套中心距分別為ei(i=1,2,3),即所建間隙矢量。將間隙矢量ei(i=1,2,3)分別向x,y軸投影,其分量可表示為
(7)
式中:ls1為連桿1質(zhì)心與點(diǎn)O1間距;ls2為連桿2質(zhì)心與其軸頸圓心之距;ls3為連桿3質(zhì)心與其軸頸圓心之距;θi(i=1,2,3)分別為3分桿件相對(duì)x軸傾角。
間隙矢量與x軸夾角計(jì)算式為
(8)
接觸點(diǎn)處作用力分解到x,y軸的分力為
(9)
式中:Fin,F(xiàn)it分別為接觸點(diǎn)處法向碰撞力及切向摩擦力。
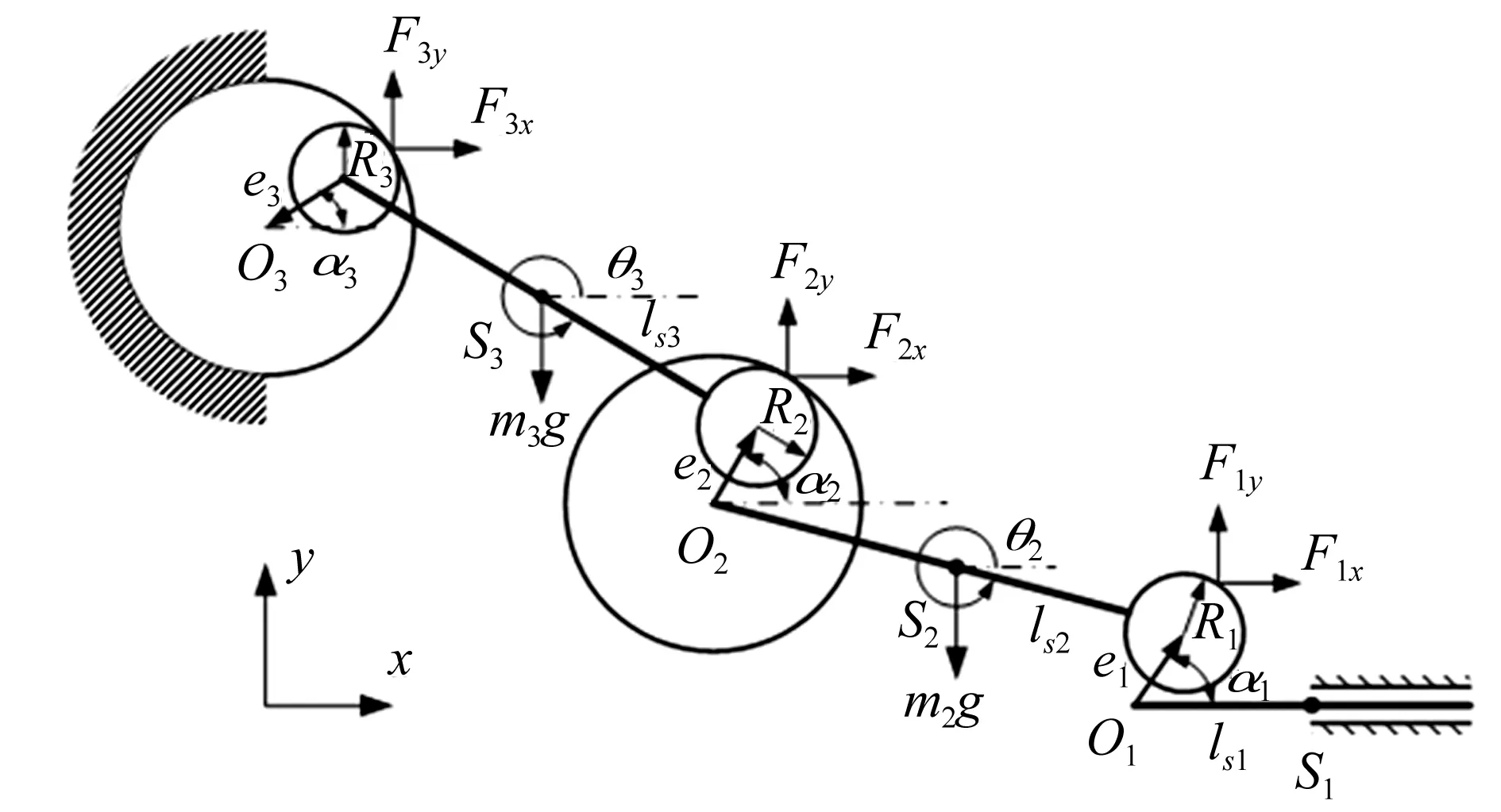
圖4 含多間隙轉(zhuǎn)動(dòng)副機(jī)構(gòu)A模型
建立機(jī)構(gòu)A的運(yùn)動(dòng)微分方程為
(10)
式中:各參數(shù)物理含義均同上。將上述各式聯(lián)立化簡(jiǎn)得
(11)
2 模型求解及結(jié)果分析
將所建機(jī)構(gòu)碰撞接觸模型通過GFORCE用戶分析子程序嵌入ADAMS中用Gear法進(jìn)行求解,時(shí)間步長(zhǎng)0.001 s,可得該傳動(dòng)機(jī)構(gòu)動(dòng)態(tài)特性。連桿1作為機(jī)構(gòu)運(yùn)動(dòng)驅(qū)動(dòng)桿,在輸入力作用下將按一定規(guī)律運(yùn)動(dòng)。設(shè)其運(yùn)動(dòng)特性已知,并按規(guī)律進(jìn)行:
(12)
式中:x為連桿1位移,變化范圍0~-0.23 m;T為運(yùn)動(dòng)時(shí)間,變化范圍0~0.085 s。初值xs1為已知,各桿件初始轉(zhuǎn)角θi按圖3測(cè)得,其它參數(shù)待求。xs1的變化曲線見圖5,速度特性為先加速后減速,保證動(dòng)觸頭以較小速度與靜觸頭碰撞。
考慮所有轉(zhuǎn)動(dòng)副處均存在間隙,共10個(gè)間隙轉(zhuǎn)動(dòng)副,間隙大小均為0.1 mm。各連桿長(zhǎng)度、慣性參數(shù)見表1,動(dòng)力學(xué)仿真參數(shù)見表2。
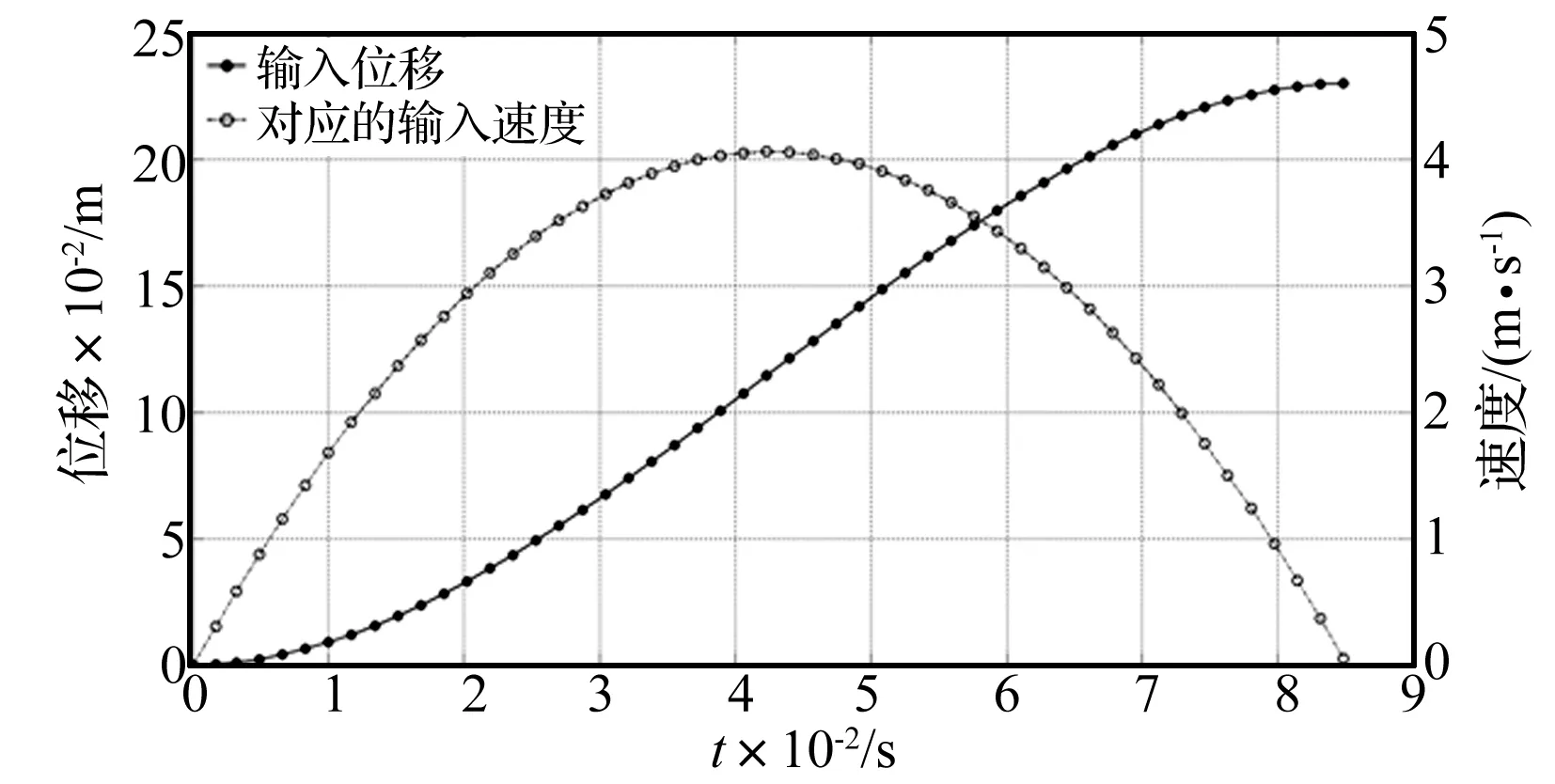
圖5 輸入位移及速度特性曲線
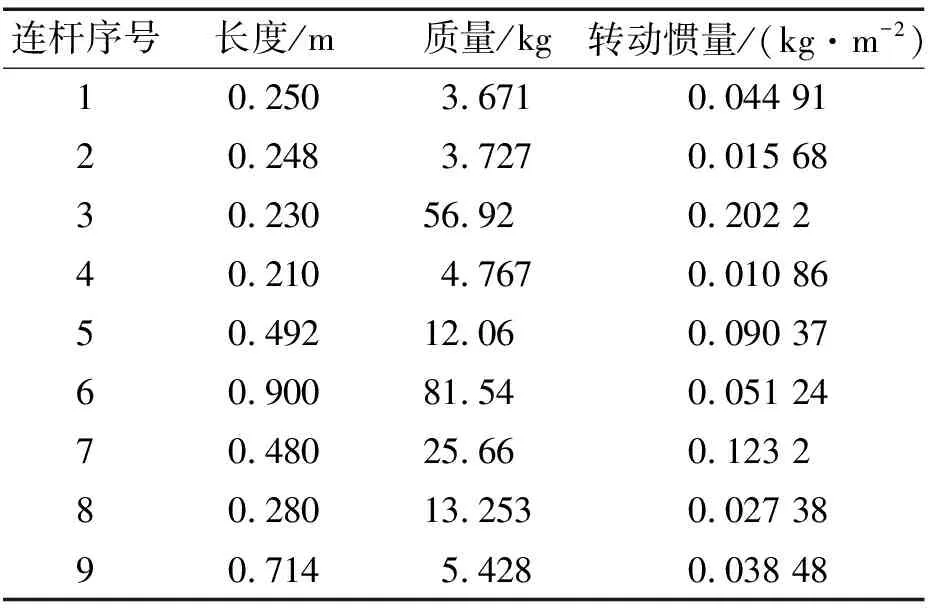
表1 機(jī)構(gòu)各連桿特征參數(shù)
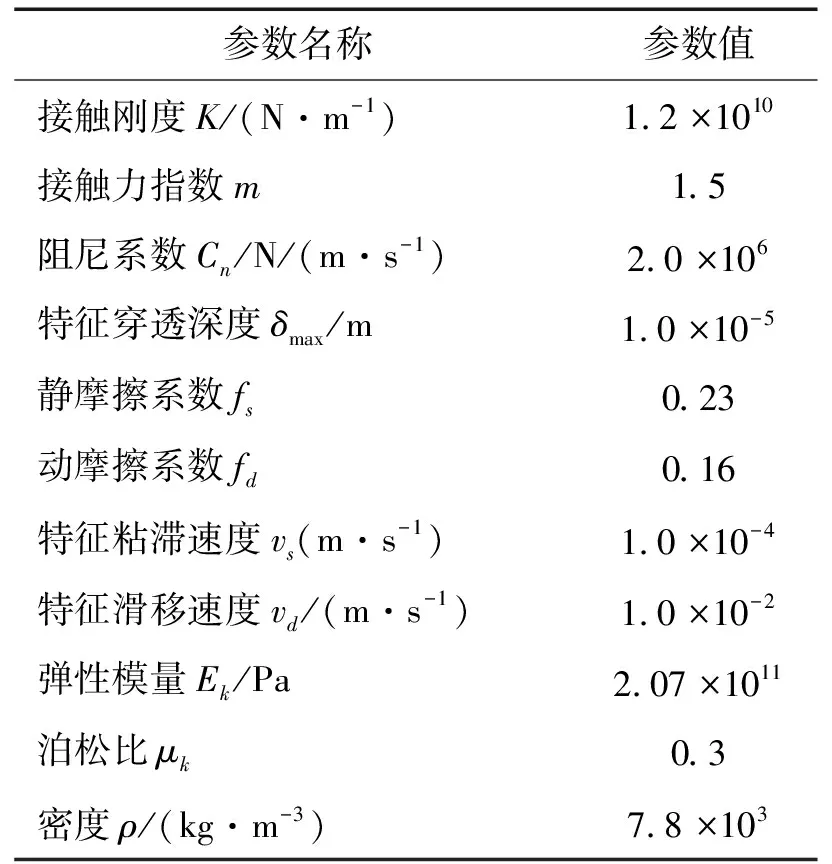
表2 仿真計(jì)算參數(shù)
仿真所得輸出端運(yùn)動(dòng)特性曲線見圖6。由圖6看出,考慮間隙時(shí)動(dòng)觸頭輸出位移特性曲線與理想模型基本重合;動(dòng)觸頭輸出速度特性曲線與理想模型基本相同;但存在兩個(gè)階段,理想模型與轉(zhuǎn)動(dòng)副間隙模型特性不一致,即間隙存在時(shí)速度有一定滯后性及波動(dòng)性,分別發(fā)生在機(jī)構(gòu)開始運(yùn)動(dòng)階段、機(jī)構(gòu)減速階段;加速度特性與動(dòng)觸頭轉(zhuǎn)動(dòng)副處反力呈較大不同,即瞬時(shí)沖擊效應(yīng)伴隨一定波動(dòng)性,最大瞬時(shí)加速度高達(dá)11 000 m/s2,對(duì)應(yīng)的沖擊力超過50 000 N,對(duì)機(jī)構(gòu)正常穩(wěn)定運(yùn)行影響較大。需研究影響該機(jī)構(gòu)運(yùn)行因素,以提高機(jī)構(gòu)運(yùn)行可靠性。

圖6 動(dòng)觸頭輸出運(yùn)動(dòng)特性曲線
3 動(dòng)態(tài)特性影響參數(shù)分析
影響多連桿傳動(dòng)機(jī)構(gòu)(圖3)動(dòng)態(tài)特性因素較多,包括材料屬性、零件加工精度、潤(rùn)滑及磨損變形等。考慮由多種因素引起的不同間隙大小對(duì)機(jī)構(gòu)動(dòng)態(tài)特性影響。由含間隙機(jī)構(gòu)與理想機(jī)構(gòu)運(yùn)動(dòng)特性對(duì)比結(jié)果看出,間隙對(duì)位移特性影響較小,可忽略;而對(duì)速度、加速度均有不同程度影響,亦可從加速度特性中發(fā)現(xiàn)轉(zhuǎn)動(dòng)副反力的變化規(guī)律。由于機(jī)構(gòu)整個(gè)運(yùn)動(dòng)過程中考慮間隙時(shí)速度特性曲線與加速度特性曲線與理想模型基本相同,僅在運(yùn)動(dòng)起始階段與減速階段含間隙機(jī)構(gòu)動(dòng)態(tài)特性會(huì)有明顯不同,在運(yùn)動(dòng)起始階段對(duì)比效果最明顯。因此取動(dòng)觸頭運(yùn)動(dòng)開始0.01 s內(nèi)的動(dòng)態(tài)特性進(jìn)行對(duì)比分析。通過設(shè)定不同因構(gòu)件制造、裝配誤差所致間隙值分析間隙大小對(duì)動(dòng)觸頭在合閘過程時(shí)速度、加速度特性影響。考慮間隙尺寸分別為0.01 mm、0.03 mm、0.05 mm及0.1 mm時(shí)將機(jī)構(gòu)動(dòng)態(tài)特性與理想模型進(jìn)行對(duì)比。
不同間隙大小時(shí)速度特性對(duì)比見圖7。由圖7看出,運(yùn)動(dòng)起始階段理想速度特性曲線為規(guī)則光滑上升曲線,而含間隙機(jī)構(gòu)速度特性則出現(xiàn)較大差異,主要在時(shí)間上的滯后效應(yīng),并隨間隙變化而變化。隨間隙的增大,速度在時(shí)間上的滯后效果愈加明顯,且波動(dòng)效應(yīng)更強(qiáng)烈,導(dǎo)致與理想速度特性曲線趨于一致的時(shí)間變長(zhǎng)。尤其間隙為0.1 mm時(shí),動(dòng)觸頭開始運(yùn)動(dòng)速度滯后時(shí)間近0.004 s,趨于穩(wěn)定時(shí)間為0.008 s。雖時(shí)間較短,但相對(duì)特高壓斷路器連桿驅(qū)動(dòng)機(jī)構(gòu)的高速重載特性而言,會(huì)造成約9.4%的運(yùn)行誤差,產(chǎn)生巨大負(fù)面作用,甚至造成嚴(yán)重事故。
不同間隙大小時(shí)加速度特性對(duì)比見圖8。由圖8看出,加速度特性存在隨間隙增大而增強(qiáng)的滯后效果;加速度在運(yùn)動(dòng)起始階段會(huì)呈現(xiàn)強(qiáng)烈的沖擊效應(yīng),具有較高的瞬時(shí)峰值,且隨間隙增大沖擊效應(yīng)越明顯,與理想加速度特性曲線趨于一致的時(shí)間亦增長(zhǎng)。尤其間隙為0.1 mm時(shí),動(dòng)觸頭瞬時(shí)沖擊加速度高達(dá)11 000 m/s2,表明動(dòng)觸頭轉(zhuǎn)動(dòng)副元素間存在劇烈接觸碰撞,產(chǎn)生巨大碰撞沖擊力,使機(jī)構(gòu)在實(shí)際運(yùn)行中產(chǎn)生強(qiáng)烈振動(dòng),甚至使機(jī)構(gòu)零部件斷裂失效,導(dǎo)致嚴(yán)重事故。

圖7 不同間隙大小時(shí)速度特性對(duì)比
通常在含單個(gè)間隙轉(zhuǎn)動(dòng)副機(jī)構(gòu)(如曲柄滑塊機(jī)構(gòu)或曲柄搖桿機(jī)構(gòu))中,較難發(fā)現(xiàn)明顯的速度特性與加速度特性滯后效應(yīng)。由分析知此兩種效應(yīng)由多個(gè)間隙轉(zhuǎn)動(dòng)副對(duì)機(jī)構(gòu)動(dòng)態(tài)特性影響疊加形成。在一個(gè)間隙轉(zhuǎn)動(dòng)副中,間隙尺寸相對(duì)副元素尺寸較小,較難對(duì)機(jī)構(gòu)動(dòng)態(tài)特性產(chǎn)生較大影響,但當(dāng)間隙轉(zhuǎn)動(dòng)副數(shù)量增加時(shí),由間隙造成的機(jī)構(gòu)整體傳遞誤差會(huì)變明顯。尤其在高速重載傳動(dòng)機(jī)構(gòu)中,機(jī)構(gòu)完成傳動(dòng)任務(wù)所需時(shí)間很短,故由多處間隙共同作用造成運(yùn)動(dòng)時(shí)間差異不能忽略。
軸頸與軸套運(yùn)動(dòng)副元素相對(duì)運(yùn)動(dòng)關(guān)系見圖9。由圖9看出,運(yùn)動(dòng)開始前軸頸相對(duì)軸套位置并不確定,設(shè)其初始位置在A點(diǎn),而軸頸與軸套在特定驅(qū)動(dòng)下的潛在接觸位置在B點(diǎn),則軸頸需一段時(shí)間由A運(yùn)動(dòng)到B。間隙增大時(shí),在相同時(shí)間內(nèi)軸頸獲得速度增大;設(shè)碰撞時(shí)間相同,碰撞瞬間加速度、碰撞力均會(huì)增大(圖6、圖8)。對(duì)本文研究的平面10桿機(jī)構(gòu),考慮同時(shí)存在十個(gè)間隙轉(zhuǎn)動(dòng)副,由該副元素初始位置與潛在接觸位置不重合所致誤差會(huì)增加,因而會(huì)出現(xiàn)機(jī)構(gòu)運(yùn)動(dòng)特性(圖6~圖8)。
針對(duì)由多間隙轉(zhuǎn)動(dòng)副共同作用導(dǎo)致多連桿傳動(dòng)機(jī)構(gòu)運(yùn)行不穩(wěn)定性,可用的減小振動(dòng)、提高傳動(dòng)精度方法有兩種,即適當(dāng)提高機(jī)構(gòu)加工精度以減小間隙尺寸及在轉(zhuǎn)動(dòng)副元素尺寸較大處(連桿3、7與機(jī)架連接位置),用滾動(dòng)軸承連接連桿與機(jī)架以減少含間隙轉(zhuǎn)動(dòng)副數(shù)量。
4 結(jié) 論
(1) 研究轉(zhuǎn)動(dòng)副間隙建模方法基礎(chǔ)上,基于間隙矢量模型,建立間隙轉(zhuǎn)動(dòng)副的碰撞鉸模型,利用非線性彈簧-阻尼模型計(jì)算接觸法向力,利用修正的庫(kù)倫摩擦模型計(jì)算接觸切向力。
(2) 針對(duì)高壓斷路器中高速多連桿傳動(dòng)機(jī)構(gòu),將碰撞鉸模型引入機(jī)構(gòu)動(dòng)力學(xué)模型,在特定工況下仿真獲得機(jī)構(gòu)運(yùn)動(dòng)特性,發(fā)現(xiàn)間隙對(duì)速度、加速度有重要影響。
(3) 分析間隙在不同尺寸時(shí)的機(jī)構(gòu)動(dòng)態(tài)特性,發(fā)現(xiàn)隨間隙的增大機(jī)構(gòu)速度、加速度特性中滯后及加速度特性中沖擊效應(yīng)增強(qiáng),該現(xiàn)象在低速簡(jiǎn)單機(jī)構(gòu)中較難發(fā)現(xiàn),此原因?yàn)槎嚅g隙轉(zhuǎn)動(dòng)副共同作用及該機(jī)構(gòu)高速特點(diǎn)所致。
(4) 對(duì)高速多連桿傳動(dòng)機(jī)構(gòu),可適當(dāng)減小初始設(shè)計(jì)間隙值,亦可通過用滾動(dòng)軸承代替部分含間隙轉(zhuǎn)動(dòng)副方法降低機(jī)構(gòu)運(yùn)行的沖擊及振動(dòng),有利于提高系統(tǒng)可靠性。
[1] Dubowsky S, Freudenstein F.Dynamic analysis of mechanical systems with clearance, part 1:formation of dynamic model[J].ASME Journal of Engineering for Industry, 1971,93(1):305-309.
[2] Dubowsky S, Freudenstein F.Dynamic analysis of mechanical systems with clearances, part 2: dynamic response[J].ASME Journal of Engineering for Industry, 1971,93(1):310-316.
[3] Dubowsky S, Gardner T N.Dynamic interactions of link elasticity and c1earnce connections in planar mechanical systems[J].Journal of Manufacturing Science and Engineering,1975,97(2): 652-661.
[4] Dubowsky S, Gardner T N.Design and analysis of multilink flexible mechanisms with multiple clearance connections[J].Journal of Manufacturing Science and Engineering,1977,99(1):88-96.
[5] Dubowsky S, Norris M, Aloni E, et al.An analytical and experimental study of the prediction of impacts in planar mechanical systems with clearances[J].Journal of Mechanical Design,1984, 106(4):444-451.
[6] Funabashi H,Ogawa K,Horie M, et al.A dynamic analysis of the plane crank and rocker mechanisms with clearances[J].Bulletin of the JSME,1980,23(177):446-452.
[7] 余躍慶,李哲.現(xiàn)代機(jī)械動(dòng)力學(xué)[M].北京:北京工業(yè)大學(xué)出版社,1998.
[8] 李哲.考慮運(yùn)動(dòng)副間隙和構(gòu)件彈性的平面連桿機(jī)構(gòu)動(dòng)力學(xué)研究[D].北京:北京工業(yè)大學(xué),1991.
[9] 唐錫寬,金德聞.機(jī)械動(dòng)力學(xué)[M].北京:高等教育出版社,1984.
[10] Miedema B, Mansour W M.Mechanical joints with clearance: a three-mode model[J].Journal of Engineering for Industry,1976,98:1319-1323.
[11] Mansour W M, Townsend M A.Impact spectra and intensities for high-speed mechanisms[J].Journal of Engineering for Industry,1975,97(1):347-353.
[12] Soong K, Thompson B S.A theoretical and experimental investigation of the dynamic response of a slider-crank mechanism with radial clearance in the gudgeon-pin joint[J].Journal of Mechanical Design,1990,112(2):183-189.
[13] 張策.含間隙曲柄搖桿機(jī)構(gòu)階段運(yùn)動(dòng)模型的建立[C].//第五屆機(jī)械傳動(dòng)年會(huì)論文集,上海,1992.
[14] Earles S W E,Wu C L S.Motion analysis of a rigid-link mechanism with clearance at a bearing, using lagrangian mechanism and digital computation[C].Conference on Mechanisms, IME, London, England,1972:83-89.
[15] Furuhashi T, Morita N, Matsuura M.Research on dynamics of four-bar linkage with clearances at turning pairs(including four reports)[J].Bulletin of the FSME, 1978, 21:518-523.
[16] 王國(guó)慶.考慮碰撞、非線性阻尼和構(gòu)件彈性的機(jī)構(gòu)動(dòng)力學(xué)理論與應(yīng)用研究[D].西安:西安理工大學(xué),2002.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
