液壓支架多機控制系統通信結構分析探討
2014-09-13 03:30:52夏潤生吳德生潘六壽
機電產品開發與創新 2014年1期
夏潤生,吳德生,潘六壽
(1.中國礦業大學(北京)機電與信息工程學院,北京 100083;2.淮南礦業集團顧橋煤礦 機電安裝隊,安徽 淮南 232100)
0 引言
綜采面液壓支架計算機控制系統(簡稱:支架控制系統)是一種多計算機控制系統,每臺液壓支架均由一臺計算機支架控制器,通過串口將工作面所有支架的控制器連接起來,形成局域通信網。控制器除了對本支架控制和監測,還可接收其它控制器的控制命令,或向其它控制器發送控制命令,實現本架控制、鄰架控制、隔架控制、成組控制、采煤機位置自動控制等功能。目前,煤礦現場應用的支架控制系統主要有德國DBT,美國JOY 等公司的產品,不同公司產品的通信結構或協議是不同的。本文通過對常見幾種多機通信結構進行分析,探討適用于支架控制系統的通訊結構。
1 多機通信網絡結構的特點
常見的多機通信網絡結構如圖1所示,有星型結構圖 1(a)、 環形結構圖 1(b)、 主從總線結構圖 1(c)、 多主總線結構圖 1(d)。
星形結構圖1(a)采用集中式控制,所有的下位機均通過獨立的通信線路連接到中心計算機(或集線器),彼此之間沒有直接的通信線路,一旦集線器出現故障,則導致全網癱瘓,失去控制功能。因此,星型結構在高可靠性的應用領域受到限制,不適于支架控制系統。
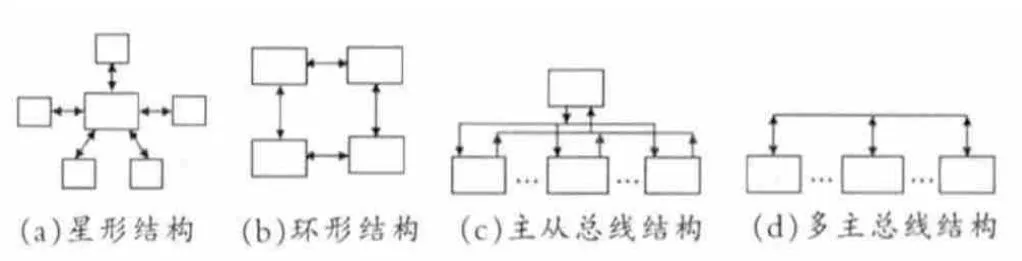
圖1 多機通信網絡結構
環行結構圖1(b)實現非常簡單,傳輸速度較快,但是每個下位機只能與相鄰的下位機相連,不相鄰下位機的信息傳遞必須通過中間下位機的傳遞才能實現,任何一個下位機出故障勢必造成整個網絡的中斷,另外,環形結構節點的擴展和移動都不太方便。
主從總線結構圖1(c)只有一個上位機,其余均為下位機。上位機發送的信號可被所有下位機接收,下位機發送的信號只能由上位機接收。任何一臺從機發生故障不影響整個系統的正常工作。一旦上位機發生故障,將導致整個系統癱瘓,通常系統有兩臺上位機,一臺工作一臺備有,以增加系統的可靠性。但從機與從機之間只能通過上位機來實現間接的信息傳遞和控制,必然影響到系統的響應速度。美國JOY 公司的支架控制系統采用這種結構。
多主通信總線結構圖1(d),就是在一根通訊總線上分布著多個節點,每個節點就是一個下位機。系統中的任何節點可作為主控節點控制其他節點,也可以作為被控節點被其他節點控制,節點是主控還是被控是隨機的,比較靈活。節點之間直接傳遞信息,響應速度快。系統中任何節點發生故障時,不會影響整個系統的正常工作,可靠性高。強大的總線仲裁功能,可順利解決信號沖突的問題。總線的電纜數量少,結構簡單,易于擴充。
因此,對于節點之間要求互控性的支架控制系統而言,多主總線結構是最理想的選擇。其中,CAN現場總線使用較為普遍。
2 多主通信總線在支架控制系統中的應用
液壓支架在工作面中要求完成采煤過程中的支護頂板、收護幫板、降移升、推進機采設備等一系列動作,并要求液壓支架、采煤機和刮板輸送機三機動作相互協調。液壓支架與這些機采設備的協調關系要求有一個通信結構可靠、合理的計算機控制系統。
根據采煤工作面運行工況以及滿足液壓支架與采煤機、刮板輸送機的相互約束關系,由CAN總線的響應速度快、可靠性高、通信實時性好、糾錯能力強等優點,本文就CAN總線結構的液壓支架計算機控制系統進行重點分析。
3 系統原理結構與功能
3.1 系統原理結構
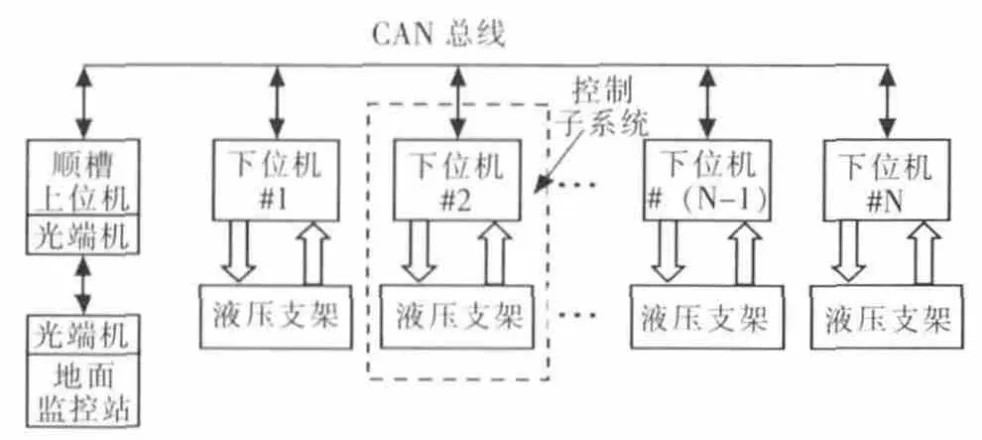
圖2 多主總線通信結構原理
根據綜采面支架之間互控的要求,認為支架控制系統采用多主總線通信結構最合理可靠。本文即采用CAN(Controller Area Network,控制器局域網絡)總線結構,原理結構如圖2所示。順槽上位機和所有下位機的串行接口均掛接在CAN總線上,地面監控站與順槽上位機通過光纜和光端機進行通信,每架液壓支架均由對應的下位機進行檢測和控制,構成控制子系統(如圖2 虛線框所示)。順槽上位機及各下位機主要完成對來自CAN總線數據信息的存儲、信號的檢測反饋、數據的歷史查詢,地面監控站主要完成工作面礦壓、支架故障信息以及運行狀態的實時顯示,CAN總線是各控制機互相傳遞信息的紐帶,各控制機均能作為其它控制機的上位機實現本架、鄰架、隔架控制以及成組控制,達到互控的要求。
3.2 下位機結構原理
下位機的結構如圖3所示,是以ARM 單片機為核心,擴展了控制放大電路,紅外接收器,位移、壓力、紅外傳感器,A/D 轉換電路,LCD 顯示器和鍵盤,構成了一個計算機閉環控制系統。CAN總線連接上位機與下位機,通過操作下位機鍵盤實現對本架支架的控制,通過單片機串口向其它下位機發出控制命令,控制相應的下位機完成預定的動作。顯示器同步顯示工作面狀態,并及時報告故障位置,便于操作人員及時做出處理。
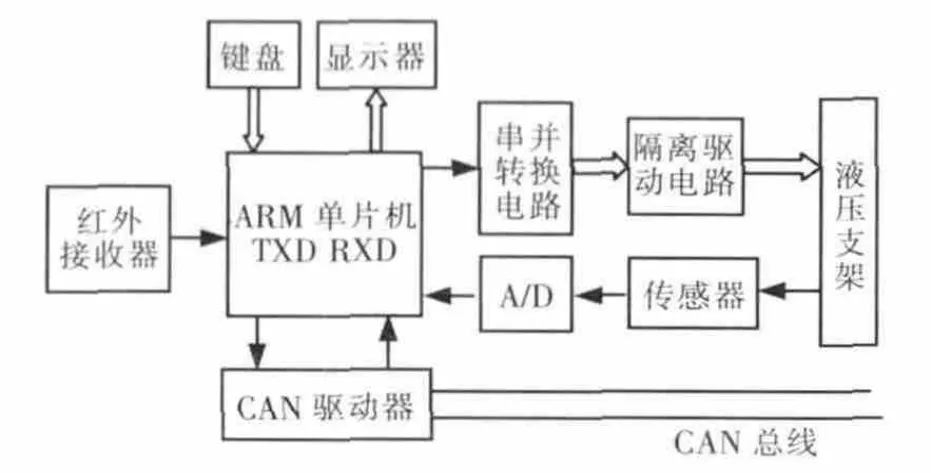
圖3 下位機的硬件設計原理圖
3.3 系統通信控制
CAN總線是一種典型的工業現場通信總線,通信方式靈活。根據CAN總線的通信協議,以及通信所必需的一些數據要求,制定了相應的工程報文格式,見表1,經驗證可以完成各控制機之間的信息傳遞和相互控制。其中,字節4 到字節11位用于存儲數據幀的實際傳輸數據,數據6、7、8為保留位,方便以后添加,用于傳輸一些檢測到的數據。
4 結束語
綜上分析可知,四種通信結構均可實現綜采面液壓支架的多機控制,但多主總線結構最合理、最可靠。本文以綜采面液壓支架作為研究對象,采用單片機串口通信技術對CAN總線多機控制系統進行了介紹。結果表明,多主機控制系統對控制命令響應迅速、可靠性高、糾錯能力強、系統的可維護性好,減少了操作人員的數量,降低了工人的勞動強度,提高了生產效率以及安全保障,適用于綜采工作面液壓支架的聯機控制。本文對研究其它液壓支架計算機控制系統具有一定的參考價值。
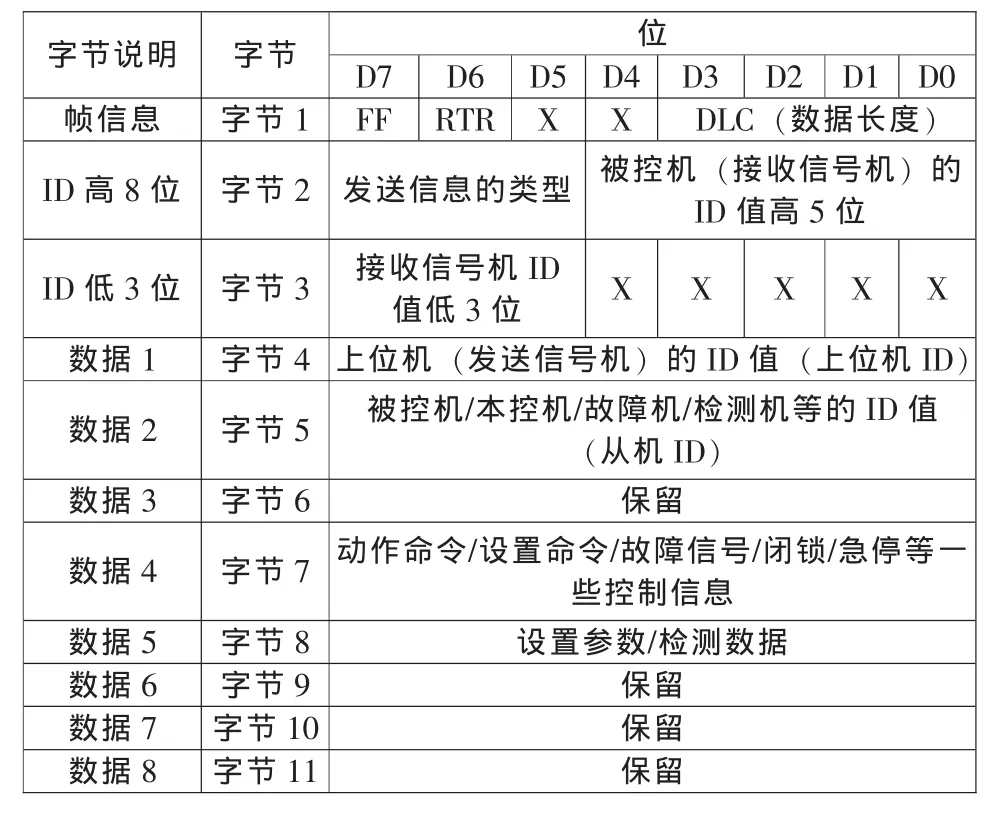
表1 工程報文格式
[1]李全利.單片機原理及接口技術[M].北京:高等教育出版社,2009.
[2]方慎權.煤礦機械[M].徐州:中國礦業大學出版社,1987.
[3]沙寶銀,王勇,姜金球,等.基于CAN總線的液壓支架分布式測控系統研究[J].工況自動化,2008,3.
[4]李首濱,韋文術,牛劍峰.液壓支架電液控制及工作面自動化技術綜述[J].煤炭科學技術,2007,5.
[5]張偉,張平,韓玉璞.多節點互控型計算機分布式控制系統的設計[J].計算機測量與控制,2002,4.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
哲學評論(2021年2期)2021-08-22 01:53:34
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
家庭影院技術(2017年9期)2017-09-26 03:41:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01