面向自動化移栽的新型番茄育苗移栽機械設計
2014-09-13 08:12:02盧華納斯哈提葉德軍咸麗胡斌
機械制造與自動化 2014年5期
關鍵詞:機械
盧華納斯哈提葉德軍咸麗胡斌
(新疆昌吉職業技術學院機械工程分院 新疆昌吉831100)
0 引言
番茄是最受歡迎的蔬菜之一,其全球年產量超過1.2億噸,中國作為第二大產國,其產量已超過3700萬噸。目前,番茄育苗技術在新疆生產建設兵團已經大面積推廣,而番茄苗移栽仍然依靠人工完成。據統計,一個熟練勞力以每天工作10 h計算,平均只能完成0.1公頃左右的移栽面積[1]。由于番茄移栽正值春播時節,勞動緊張導致了勞動力價格的節節攀升,因此加大番茄移栽機械的研發,將有助于提高番茄生產效率,降低生產成本,也符合“番茄生產全程機械化關鍵技術與裝備”這一當前優先發展的高技術產業化重點領域的發展要求,更重要的是可將新疆紅色產業做大做強。
國內外目前番茄移栽機的特點:1)投資成本大,價格昂貴,結構復雜,維修困難。如臺灣K C.Yang等研制的移栽機器人,在工作的過程中,依靠系統的視覺傳感器和力度傳感器,能夠做到夾持秧苗而不會對其造成損傷。但設備維修費用高,一般的種農戶難以接受。如田耐爾牌秧苗移栽等機。鵬飛牌多功能秧苗移栽機,富來威油菜移栽機,重慶北卡農業科技有限公司生產的番茄移栽機等,這些移栽機所需送苗人力過多,過程復雜。2)要求配套技術條件較高。3)小面積番茄地里不能使用。因此加大自動化番茄移栽機械的研發工作力度,盡早將成熟、適用的番茄移栽機械投放市場,不但可以提高番茄生產效率,而且可以節約成本,提高收入。
本文致力于面向自動化移栽的番茄育苗移栽機械設計,通過關鍵機構的研究和設計,開發了新型番茄育苗移栽機械,解決了當前依靠大量人力進行番茄育苗移栽低效率的難題。
1 新型番茄移栽機的工作原理和總體設計
1.1 新型番茄移栽機總體設計
番茄移栽機械主要由落苗機構,行走機構,行距調整機構等組成,如圖1所示。
其工作原理是來自拖拉機的動力由驅動輪7傳動到偏心機構3和長連桿8,長連桿運動過程中帶動下頂桿的上移,推開門桿,同時頂開上頂桿,苗盤中的秧苗通過隔板式帶式輸送裝置23將苗由送料輪輸送至導苗器,偏心輪機構轉過180°后,中門打開,苗落入漏斗中,隨著驅動輪的運轉實現插苗。
1.2 番茄移栽機械的主要技術參數
1)移栽機配套動力:15 kW以上輪式拖拉機;作業行數/行 :2;
2)栽培模式 :株距:25~40 cm;行距:30~60 cm可調;
3)送苗方式:人工配合機械送苗
4)番茄缽苗的形狀 :30 mm×20 mm×40(底部直徑×高×度)的錐體
5)作業速度/m/s:0.4~0.6(60~80株/min)
6)機械栽苗率:≧90%技術指標;
7)質量:900 kg以下。
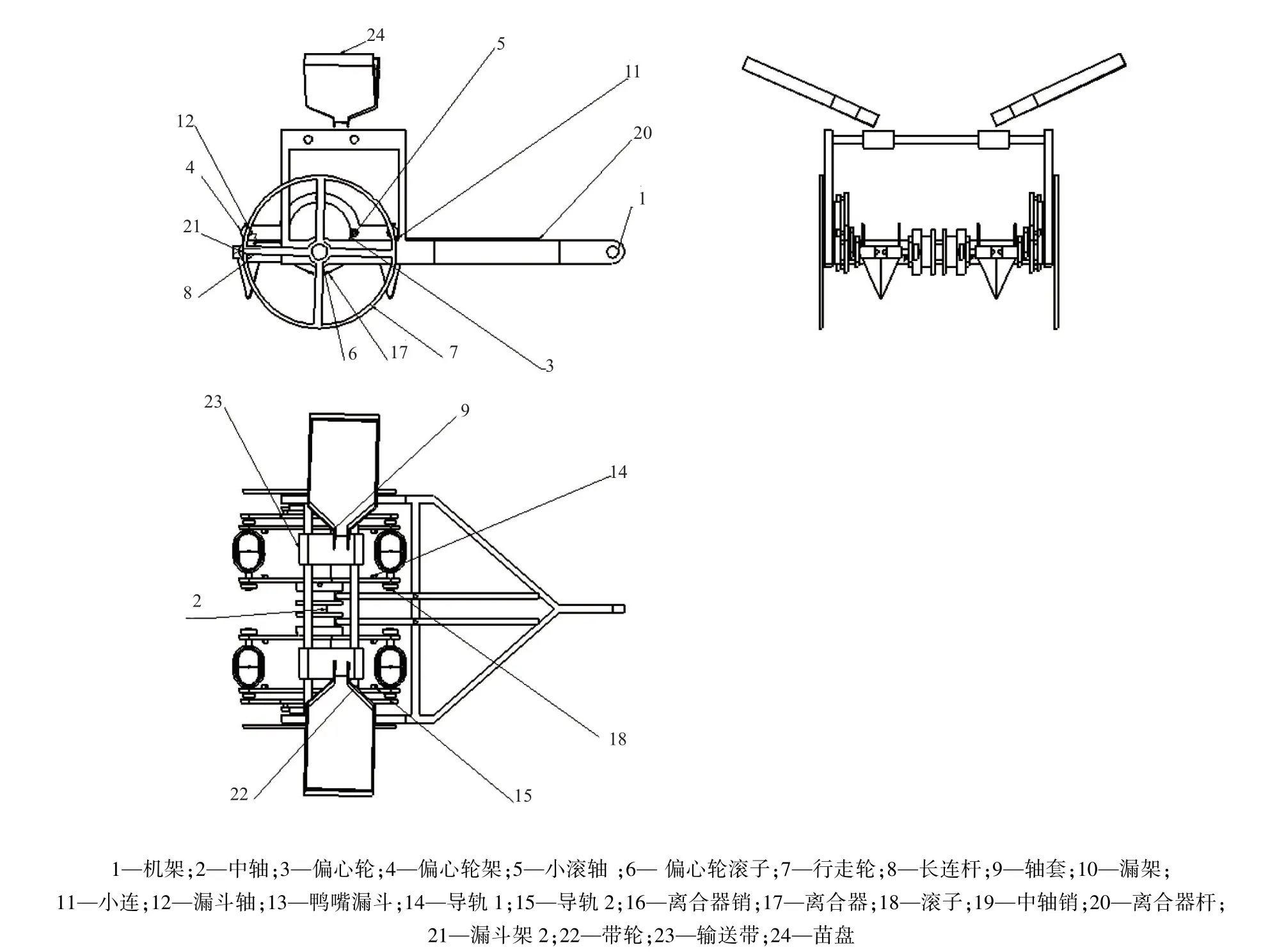
圖1 番茄移栽機械結構圖
2 新型番茄移栽機械的關鍵機構設計
2.1 番茄落苗機構設計
2.1.1 番茄苗的特點
新疆的番茄主要采用育苗移栽,番茄育苗的底部的形狀為30 mm×20 mm×40 mm的錐體,苗的高度一般在15~20 cm之間。由于育苗移栽前施水后存在一些尺寸變異,育苗底部一般在2 mm尺寸范圍內。[2]
2.1.2 番茄苗運動軌跡
為了節省人力,使番茄順利落苗,不會傷苗且不影響苗移栽的直立度。要求具體軌跡和姿態應該是:1)使苗按一定的軌跡運動,苗在略帶斜度的苗架上借助重力能順利到達送苗輸送帶,2)苗沿著軌跡運動時,對應落苗、送苗、接苗、植苗位置應有不同的姿態,送苗與接苗夾角為90°,投苗時接苗器與植苗器軸線的夾角為 0°左右,苗在離開導苗管時不受阻力,植苗器軸線應垂直地面,以保證接苗順利和植苗準確;3)植苗器在接苗點處和植苗點處的速度為0。
2.1.3 番茄落苗機構的設計
a)輸送苗、落苗機構的落苗過程
番茄苗的落苗過程可分為4個階段:1)番茄苗由苗盤取出落入輸送器,輸送器借助拖拉機的動力驅動,將番茄苗逐一輸送到送料輪盤,苗做勻速運動 。2)苗由拔苗盤送至導苗管口,苗做平面運動,此時為轉動。3)苗在導苗管內視為質點的重力加速直線運動,忽略葉片與管內表面的摩擦[3]。4)從整個苗移出導苗管口到苗缽接觸地面,假設苗缽與地面是塑性碰撞,碰撞后苗缽的運動簡化為定點的運動,到被覆土定位。
b)輸送苗、落苗機構的結構
番茄送苗機構主要采用輸送帶結構,主要由隔板、輸送帶、帶輪構成。如圖2所示。
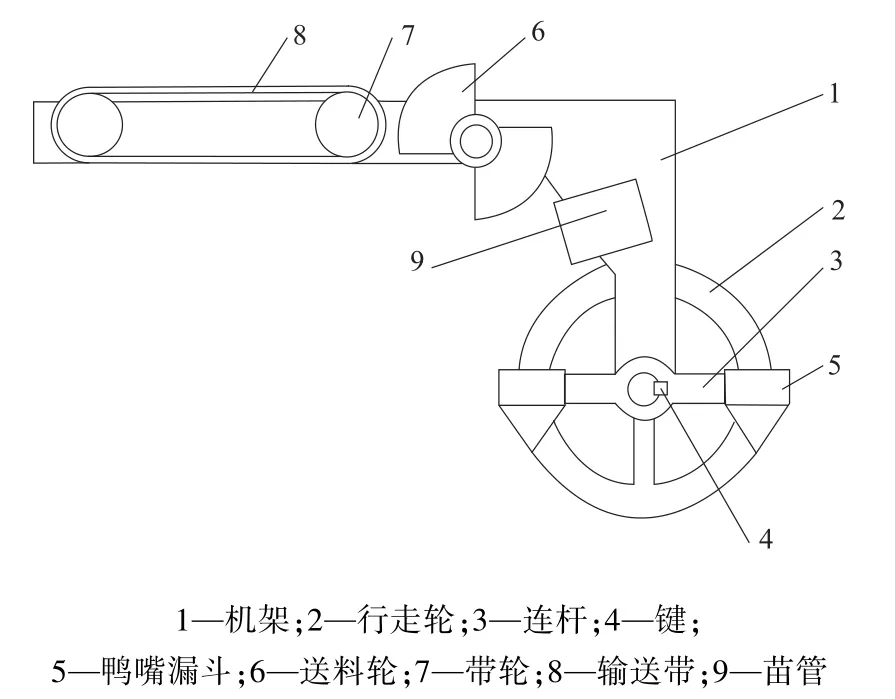
圖2 番茄移栽機械輸送苗、落苗機構圖
c)輸送苗、落苗機構的原理
秧苗通過隔板帶式輸送裝置將苗輸送至送料輪,苗隨著送料輪的轉動被運送到接苗管;在重力加速度作用下,苗直線運動被送到喂苗機構。喂苗機構主要有連桿、鴨嘴漏斗等組成。工作時,苗落入送料輪中,隨著移栽單體的轉動放在接苗管中的苗落下,落入栽植單體的鴨嘴漏斗中,完成了喂苗工作。苗移出喂苗口到接觸地面,到被覆土定位。
2.2 番茄移栽機移栽行距調整方式
2.2.1 番茄移栽行距特點
按照番茄農藝技術的要求制定移栽行距調整的方案,確定最佳的調整方案。
2.2.2 番茄移栽機移栽行距調整方式
考慮確保投苗準確性,該機采取離合器實現苗株數的調整,且機架的相對位置可調,通過調整機架的相對位置,可實現30~60 cm行距。其功能調整簡單、易操作。據此基于Solidworks設計的番茄移栽機械的行距調整結構圖如圖3所示。
3 番茄移栽機械的關鍵機構的運動仿真
3.1 移栽機虛擬樣機的建立
運動仿真是一種簡單的運動模擬,是在Solidworks平臺上建立已設計好的番茄移栽機械模型。運動仿真是將對機構的運動無影響和不起作用的零件都做簡化處理,只將最主要的零部件裝配在一起,在不影響運動情形的前提下對零部件的結構進行必要的優化[4]。基于這樣的思路,建立番茄移栽機的仿真模型前,需先將機架、輪子、連桿、漏斗、送料輪、輸送帶、苗盤等結構和運動主要零部件裝配成一個簡化的裝配體模型。番茄移栽機械裝配體模型如圖3所示。
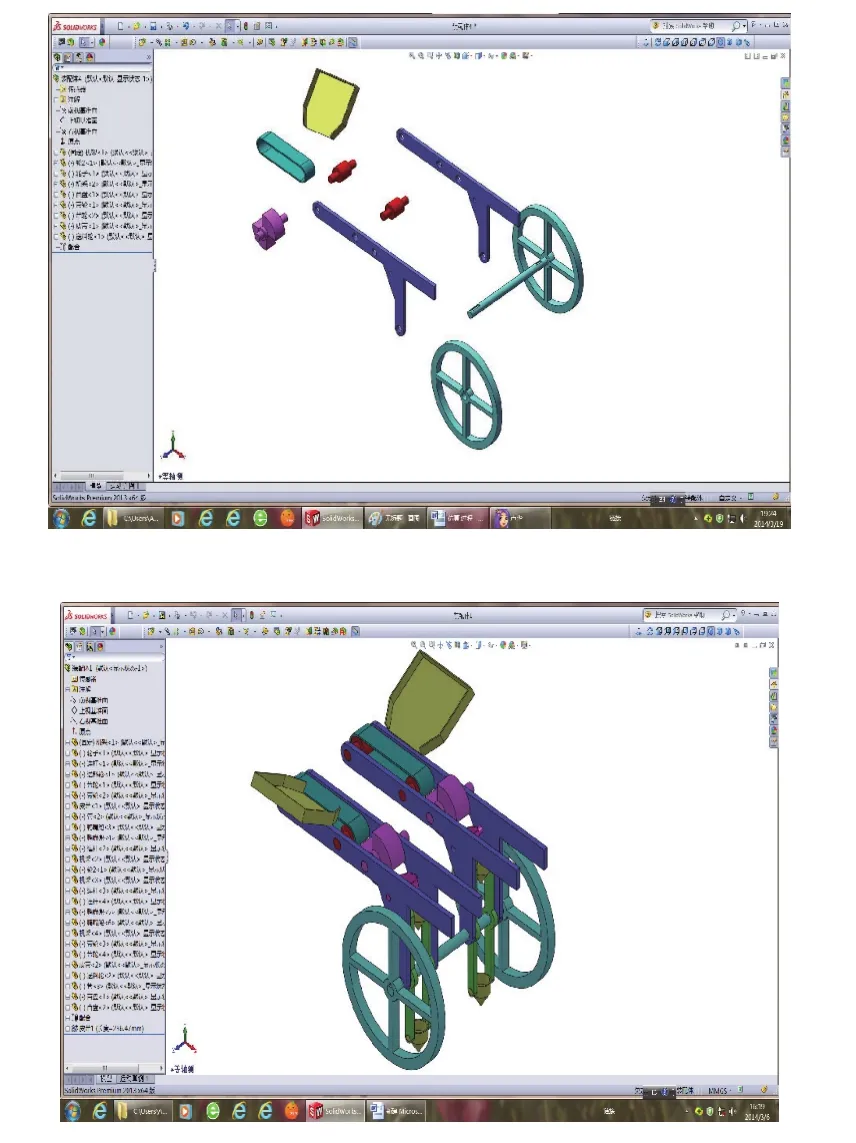
圖3 番茄移栽機械裝配體模型圖
3.2 基于 Solidworks的番茄移栽機械運動仿真分析
3.2.1 設定番茄移栽機械運動仿真參數
在Solidworks環境下,結合實際工況和技術要求對番茄移栽機械的運動參數進行設定,設定旋轉馬達代表番茄移栽機械的運動,選擇長軸為動力源。然后確定運動參數,根據實際工況和技術圖樣確定豎直方向位移為300 mm,時間初步設定為5 s,所以運動的馬達類型為[等速],轉速為 100 r/min。
馬達的運動參數設定完后,確定各個馬達相應的時間起止點[5],完成后的運動仿真模型和MotionManager界面如圖4所示。
圖4 設定好運動參數的運動仿真模型
3.2.2 動畫仿真番茄移栽機械運動過程
在MotionManager界面中將仿真類型選為[動畫],對番茄移栽機的運動過程進行仿真和再現。運動仿真后進行干涉檢查,發現零部件之間不存在干涉,動作完成以后單擊[保存動畫]將仿真動畫保存為AVI或其他文件類型,如圖5所示。圖5(a)中番茄苗經過傾斜板在重力作用下落入輸送帶,秧苗通過隔板式帶式輸送裝置能將苗正確地輸送至送料輪,圖5(b)苗隨著送料輪轉過180°,后接苗管能完好的接到苗;圖5(c)連桿在轉動過程中送料輪已接到苗準備下落,圖5(d)落入栽植單體的鴨嘴漏斗中的苗接觸地面,到被覆土定位。另一個鴨嘴漏斗已接到第二顆苗,在往復過程中完成了移栽。
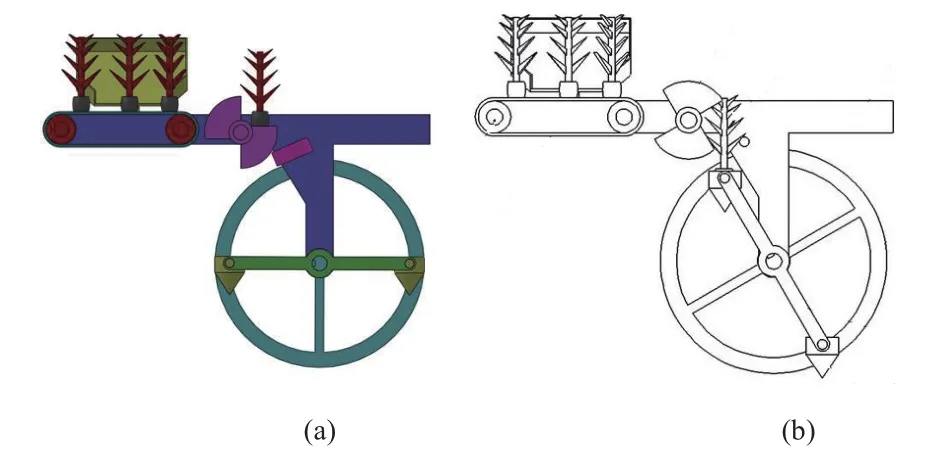
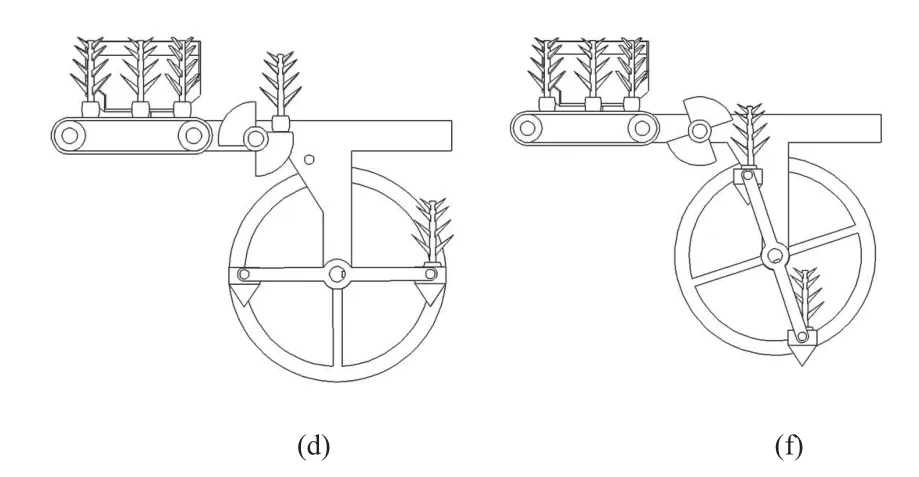
圖5 番茄移栽機械運動仿真圖
由仿真結果可知,輸送帶、送料輪、導苗管、漏斗的運動保證移栽機能夠順利地取苗和投苗,當前進速度與主軸轉速數值比一定時,株距值始終保持不變,只要保持前進速度與轉速的比值不變,則取苗軌跡和植苗軌跡都不會受影響。
4 結語
針對現有番茄移栽機械自動化程度不高的現狀,本文設計了基于新型機構的自動化番茄育苗移栽機械,重點研究了送苗、落苗機構和行距調整機構的設計,在此基礎上,進行了新型番茄育苗移栽機械關鍵機構的運動過程仿真和分析。研究結果表明:仿真所得的軌跡能夠很好地滿足移栽機的高效自動化移栽要求。
[1]楊二軍.新疆番茄醬出口市場潛力研究[D].烏魯木齊:新疆農業大學,2013.
[2]倪向東,等.導管式番茄移栽機的設計[J].農機化研究2011,2:85-86.
[3]丁文芹,等.穴盤苗自動移栽機的結構設計及運動仿真分析[J].農機化研究,2011(10):74-75.
[3]高國華,等.自動化穴苗移栽機關鍵機構的模塊化設計[J].機電工程, 2012,29(8):883-885.
[4]魯恒飛.基于Solidworks的懸掛式輪轂軸承壓裝機設計與優化[D].合肥:合肥工業大學,2012.
[5]Gianluca Caruso,Stefano Conti,Effects of transplanting time and plant density on yield,quality and antioxidant content of onion(Allium cepa L.)in southern Italy,Elsevier期刊 Scientia Horticulturae,2013:19.
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09