光電著艦測量設備甲板捷聯式視軸穩定系統設計
2014-09-15 04:39:00李雪雷王志乾蘇宛新喬彥峰
東北師大學報(自然科學版) 2014年2期
李雪雷,王志乾,蘇宛新,喬彥峰
(1.中科院長春光學精密機械與物理研究所,吉林 長春 130033;2.中國科學院大學,北京 100049)
光電著艦測量設備是采用光學手段對艦載機著艦過程進行跟蹤觀測的精密測量設備,它采用自動目標識別[1]和光電跟蹤技術對著艦飛行器進行精密跟蹤,高精度獲取飛行器的下滑航跡角[2]信息及姿態數據,在艦機適配性訓練[3]及艦載機定型鑒定中發揮著重要的作用.
作為一種艦機精密光學測量設備,艦體在海浪的作用下產生的隨機搖擺,對設備的跟蹤性能和測量精度都會產生很大的影響.因此,在對設備進行總體設計時,需要考慮加入慣性系視軸穩定控制系統[4]來克服艦體搖擺對觀測視軸[5]指向的影響,保持設備初始跟蹤基線的穩定,并提高對目標動態觀測時的跟蹤精度和測量精度.
1 視軸穩定系統結構選取
光電著艦測量設備采用兩軸式光電跟蹤儀結構[6],對于兩軸式光電跟蹤設備而言,實現動基座視軸穩定通常有穩定平臺法、視軸捷聯穩定法和甲板捷聯穩定法.
穩定平臺法是首先實現一個獨立的抗搖承載平臺,該平臺具有三軸抗搖的運動機構和伺服控制回路,然后將兩軸的光電跟蹤設備安放在承載平臺上.
視軸捷聯穩定法是將慣性傳感器(分離的單軸陀螺或組合式多軸陀螺)安裝在光電跟蹤設備的視軸平臺上,直接敏感出在視軸上的慣性系運動分量,通過反饋控制使視軸指向保持穩定.
甲板捷聯穩定法是將慣性傳感器與甲板平面捷聯安裝,首先敏感出甲板平面上的艦體搖擺數據,然后通過數學變換,計算出光電設備跟蹤軸向上的擾動分量,最后再對光電設備進行抗擾動控制,從而實現跟蹤視軸穩定.
考慮到甲板捷聯式結構簡單,設備安裝校準時復雜程度較低,便于采用成熟的整裝傳感器產品,可借用設備原有的伺服系統工作,且外部數據接口中也常以甲板系作為艦搖數據參考基準,本文在設計視軸穩定系統時選用甲板捷聯式直接穩定法.
2 結構描述和姿態角變換公式
系統結構如圖1所示,B,M和C為光電著艦測量設備的3個基本組件:B為設備基座,與艦體甲板固連;M為方位轉臺,繞設備垂直軸旋轉,產生方位角A,并承載設備水平軸系O′和觀測機構C;C為觀測機構,主要是光學成像系統,繞水平軸O′做俯仰運動產生俯仰角E,V為光學系統視準軸.由于水平軸O′被安裝在方位轉臺上,因而水平軸及觀測部也同時做方位旋轉,視準軸、垂直軸、水平軸校準后交匯于同一原點.
I為慣性系下的姿態角傳感器,選用三軸組合慣導平臺[7],通過設備基座與艦體甲板捷聯.慣導平臺的3個敏感軸ox,oy和oz形成右手坐標系,分別敏感出3個自由度的姿態角量.其中ox為艦體橫滾角R的敏感軸;oy為艦體艏搖角H 的敏感軸;oz為艦體縱搖角P的敏感軸.
由于光電著艦測量設備采用其方位軸、俯仰軸作為運動軸,因而,要實現視軸姿態控制,應將慣導平臺敏感到的姿態角量變換成甲板系下的視軸指向角偏差.
通過分析系統結構的幾何關系,引用坐標系旋轉矩陣,可推出甲板捷聯法的“甲板姿態-視軸指向”姿態角變換公式[8]:
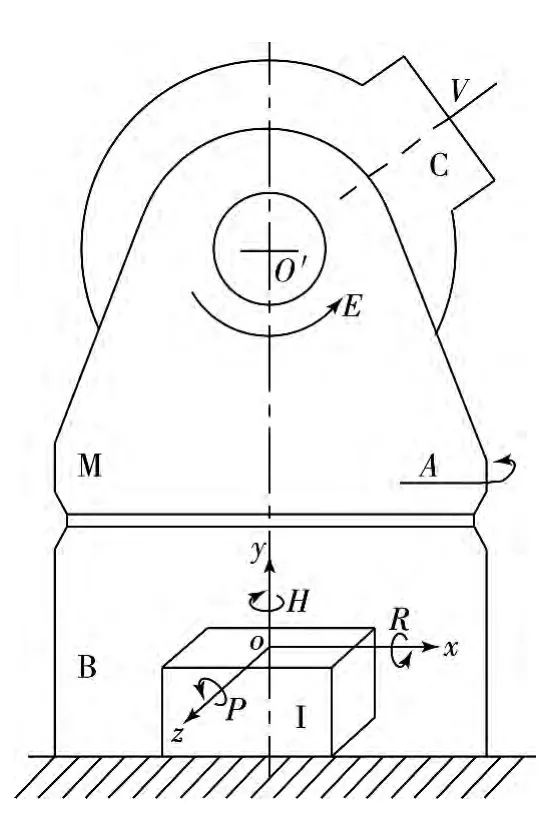
圖1 甲板捷聯法結構示意圖

式中:Ao,Eo分別為目標在站心地平極坐標系[9]下的方位角、俯仰角指向;R,P,H分別為慣導敏感出的艦體/設備搖擺數據橫滾角、縱搖角、艏搖角;Ac,Ec分別目標在甲板極坐標系下的方位、俯仰角指向.
各變量要素還應滿足如下基準條件:
(1)慣導平臺與甲板捷聯安裝時將傳感器上的載體軸向標記刻線OX,OY和OZ與甲板坐標系對準,即OX平行于甲板平面指向艦艏,OY垂直于甲板平面指向天頂,OZ平行于甲板平面指向右舷.
(2)慣導平臺的姿態角數據基于站心地平坐標系,即ox,oy和oz敏感軸的慣導數據零位分別指向正北、天頂和正東方向;橫搖角R、縱搖角P的正向與其敏感軸間遵從右手定則關系,艏搖H的正向與其敏感軸間遵從左手定則關系.
(3)設備在甲板上安裝時經過調平和零位校準,使得設備跟蹤軸方位角A的零位指向艦艏方向,俯仰角E的零位平行于甲板平面.
按照(1)式、(2)式求出Ac和Ec后,分別與設備跟蹤軸在甲板系下的指向角反饋量A和E做差,即可得出艦體搖擺引起的視軸指向角偏差量.
3 控制系統設計
3.1 控制系統框圖
視軸穩定控制系統建立在設備固有的自動跟蹤控制回路基礎上,和著艦設備的其他光電跟蹤功能(如電視自動跟蹤)同時工作,方位和俯仰軸都采用相同的控制結構.以方位角跟蹤為例,設備伺服控制系統的完整框圖如圖2所示.圖2中視軸穩定系統與設備的其他跟蹤控制回路共用速度回路內環,視軸穩定系統的控制量輸出作為其他控制方式的前饋量,疊加在速度回路輸入端.
為便于分析視軸穩定回路的抗搖隔離性能,根據疊加原理,將視軸穩定回路分離出來,并考慮到方位、俯仰回路的關聯性,對視軸穩定控制系統建模(如圖3所示).
視軸穩定控制系統由光電著艦測量設備的角速度跟蹤內環和慣性系下的視軸姿態控制外環構成(見圖3).內環采用旋轉編碼器作為方位軸、俯仰軸速度反饋元件,以直流力矩電機作為執行元件,控制對象可簡化為典型的二階慣性環節[10],通過閉環控制,實現高帶寬高精度的角速度跟蹤;外環是姿態穩定環,以組合慣導平臺作為姿態角反饋元件,姿態角給定值為站心地平坐標系下的目標指向角.當艦體搖擺時,搖擺運動對視軸形成擾動,最終表現為視軸在甲板坐標系下的指向偏差.該指向偏差被組合慣導平臺間接敏感輸出(數據需經變換),作為內環的指向誤差給定量,內環通過伺服控制實施指向修正,從而實現視軸穩定.
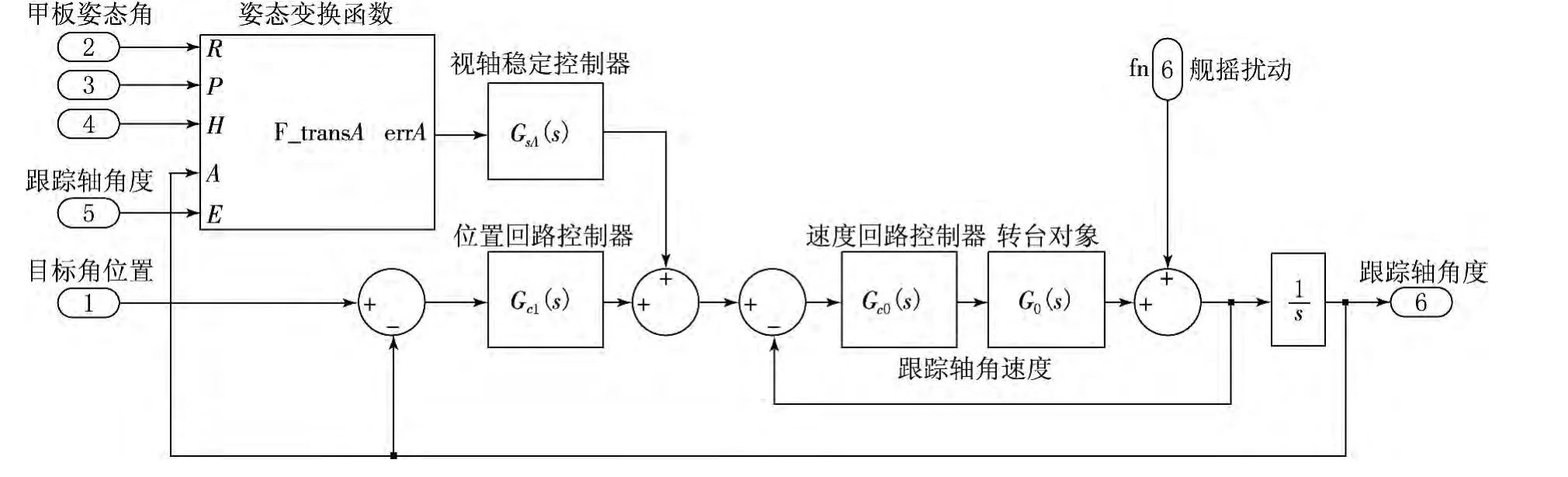
圖2 帶視軸穩定的方位跟蹤控制系統
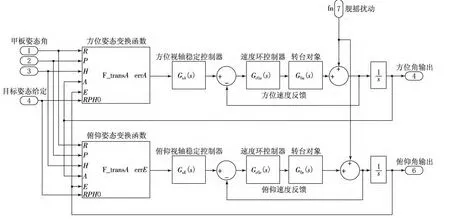
圖3 視軸穩定控制系統
3.2 控制參數選取及仿真
選取控制參數時,首先對系統的直流電機調速模型采用待定系數試驗法求解[11],確定出方位、俯仰控制對象的固有參數,然后根據自動控制理論采用頻域設計法,對速度回路控制器進行參數設計,使系統開環期望特性滿足穩定性和帶寬要求.為兼顧系統的其他自動跟蹤功能,速度回路選用了二階滯后-超前校正網絡[12],可在有限帶寬條件下,提高回路增益,提升速度跟蹤性能.
由于海浪引起的艦搖擾動帶寬很窄(實際統計約為0.1Hz),遠小于速度回路閉環帶寬,且視軸姿態穩定回路的隔離比要求也不算太高,故對視軸穩定回路的控制器采用一階滯后-超前型校正環節.
經對某著艦測量設備的速度開環特性進行實測分析,設計了該視軸穩定控制系統,各環節參數如下:
進行仿真時,根據海上的實際觀測經驗,以正弦運動模型θ(t)=3sin作為艦搖函數,同時施加于橫搖、縱搖和艏搖參量上,通過姿態角變換函數計算出方位、俯仰軸上的擾動速度量作為擾動輸入,并模擬出慣導平臺的姿態角測量值.用Matlab工具建立系統控制模型,將運動函數代入系統進行仿真,得到系統對地平系零位目標(地平系視軸姿態角給定量為0)進行艦搖穩定控制時,甲板系指向角數據A和E與誤差數據err A和err E的輸出曲線見圖4.
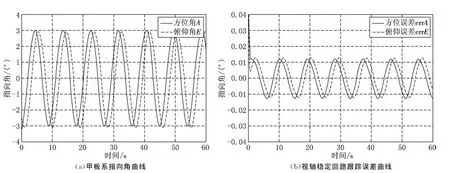
圖4 視軸穩定控制回路跟蹤性能仿真曲線
視軸穩定系統的艦搖擾動隔離殘差率[13]可由err A/(err A+A)與err E/(err E+E)求出,對上述仿真數據的進一步計算可知,系統的艦搖隔離殘差率可達0.4%,合隔離度約50dB[14].實際系統中,受慣導的測量精度、數據滯后及系統固有特性的影響,隔離精度會有所下降,可針對具體控制對象的模型特征,通過調整姿態控制器參數或階次等方式改善穩定回路性能.
4 試驗效果
本文的甲板捷聯法視軸穩定系統應用于某光電著艦測量設備,選用敏感精度為0.05°的慣導平臺作為艦搖姿態傳感器,設備在搖擺臺上進行了模擬三級海況的視軸穩定試驗.試驗步驟如下:
(1)將設備在搖擺臺上安裝校準,完成坐標系對準,使之滿足上述3個基準條件;
(2)放置目標源,放置時為不失一般性,選取地平極坐標系下方位角30°、俯仰角-10°作為目標點位;
(3)固定搖擺臺,調整設備視軸指向目標源,并使目標源成像在視場中心,保持系統相對靜止;
(4)鎖止設備跟蹤軸,設置搖擺臺驅動參數,以搖擺臺當前位置為擺動原點,選取擺幅3°、周期9s,相位依次滯后45°的激勵源作為三級海況搖擺參數[15]驅動搖擺臺,此時視軸穩定系統未工作,目標像點在視場內自由運動,記錄圖像并判讀出目標在視場中的方位脫靶量Δa、俯仰脫靶量Δe,以(Δa,Δe)散點序列連線繪制目標在視場內的相對運動軌跡如圖5a;
(5)解除對設備跟蹤軸的鎖止,開啟視軸穩定伺服系統,相同擺動條件下驅動搖擺臺,在視軸穩定系統的作用下,視軸指向自動進行動態修正,記錄圖像并處理,獲得目標在視場內的散點軌跡如圖5b.

圖5 視軸穩定效果試驗曲線
對比圖5可知,視軸穩定系統工作后,對艦體搖擺帶來的指向偏差起到了良好的抑制作用.經對分析試驗數據,在三級海況條件下,艦搖隔離誤差最大值為5′.
5 結論
甲板捷聯式視軸穩定系統結構簡單,便于采用成熟的整裝傳感器產品實現,設備安裝標校也相對容易,擾動隔離效果明顯,且可借助于光電跟蹤設備固有的伺服系統進行控制,是各種艦載、機載、彈載、星載光電跟蹤測量設備隔離慣性系擾動的一種很好的選擇方案.從仿真和試驗也可以看出,系統的視軸穩定隔離誤差也與慣導平臺的測量精度有關,針對不同的應用環境,可綜合考慮性價比因素,選用高精度慣性傳感器以獲得更好的隔離效果.
[1]黃宗福,韓建濤,陳曾平.天文光電圖像序列目標成像特征提取與分析[J].光電工程,2011,38(4):59-65.
[2]羅歡,候明善,劉文風,等.RLV自主著陸航跡設計與控制研究[J].計算機測量與控制,2012,20(3):681-686.
[3]漁翁.艦機適配性對航母設計的影響[J].現代艦船,2006(10):33-36.
[4]王輝化,劉文華,張世英,等.艦載視軸穩定系統的變結構控制研究[J].光電工程,2007,34(3):26-28.
[5]李大成,趙宏斌.基于坐標變換的視軸穩瞄算法[J].光電技術應用,2011,26(2):5-8.
[6]賈慶蓮,喬彥峰,鄧文淵.光電經緯儀的粒子——卡爾曼聯合目標跟蹤算法及仿真[J].光電技術應用,2007,22(2):66-70.
[7]張國良,曾靜.組合導航原理與技術[M].西安:西安交通大學出版社,2008:31-37.
[8]方成一,王振旺.艦載雷達天線電子穩定方程的推導方法[J].雷達與對抗,1999(2):68-74.
[9]馬媛,張成.慣性導航中的坐標變換研究[OL].[2009-02-05].中國科技論文在線,Http://www.paper.edu.cn/releasepaper/content/200902-129.
[10]王顯正,陳正航,王旭永.控制理論基礎[M].北京:科學出版社,2000:154-170.
[11]王艷穎,王珍,郭麗環.直流電動機傳遞函數測定的實驗研究[J].實驗技術與管理,2008,25(8):38-40.
[12]尾形克彥.現代控制工程[M].北京:電子工業出版社,2003:388-415.
[13]孫輝,郎小龍,李志強,等.動載體光電平臺視軸穩定精度的檢測[J].光學精密工程,2011,19(9):2131-2137.
[14]何榮賢,蔣軍.大型船載衛通伺服隨動系統船搖隔離度[J].陜西工學院學報,2005,21(2):8-10.
[15]周云華,彭松江,邱群先,等.艦船海況模擬平臺等效搖擺參數研究[J].艦船科學技術,2013,35(9):71-74.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
工業設計(2016年12期)2016-04-16 02:52:00
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
設備管理與維修(2015年12期)2015-04-09 06:57:00