改進(jìn)魚(yú)群算法在飛機(jī)下滑配平中的應(yīng)用
2014-09-15 07:54:56陶楊韓維宋偉健
飛行力學(xué) 2014年4期
關(guān)鍵詞:飛機(jī)
陶楊, 韓維, 宋偉健
(1.海軍航空工程學(xué)院 飛行器工程系, 山東 煙臺(tái) 264001;2.海軍航空工程學(xué)院 科研部, 山東 煙臺(tái) 264001)
0 引言
飛機(jī)的運(yùn)動(dòng)狀態(tài)是由一系列非線性微分方程來(lái)描述的。在以往的配平計(jì)算中,多是令飛行狀態(tài)下?tīng)顟B(tài)參數(shù)的時(shí)間導(dǎo)數(shù)為零,從而將非線性微分方程組簡(jiǎn)化為一組非線性代數(shù)方程組,通過(guò)Newton迭代法[1]、梯度下降法[2]等數(shù)值方法來(lái)求解,但采用這類(lèi)方法存在一個(gè)問(wèn)題,即對(duì)初值的選取具有很大的依賴(lài)性,只有當(dāng)初值與平衡點(diǎn)很接近時(shí)才能較快收斂,否則會(huì)造成迭代步數(shù)的增加甚至出現(xiàn)不能收斂的情況。
為了解決該問(wèn)題,近年來(lái)有學(xué)者提出采用數(shù)值優(yōu)化的方法,首先構(gòu)建一個(gè)代價(jià)函數(shù),用各種智能尋優(yōu)算法,如遺傳算法[3-5]、模擬退火算法[6]等,通過(guò)求得代價(jià)函數(shù)的極值,從而確定飛行的平衡狀態(tài),但由于算法的局限性,采用單一算法存在易陷入局部最優(yōu)解的缺點(diǎn)。
本文采取了一種新型自適應(yīng)變異算子的人工魚(yú)群算法來(lái)求解定常下滑過(guò)程中的飛機(jī)平衡狀態(tài)。該算法在求解時(shí)既能保持高效搜索效率,同時(shí)也能避免陷入局部最優(yōu)的情況發(fā)生。
1 飛機(jī)下滑動(dòng)力學(xué)模型及代價(jià)函數(shù)的選取
飛機(jī)保持一定的下滑角沿下滑道勻速運(yùn)動(dòng),在該過(guò)程中,飛機(jī)為定常飛行狀態(tài),采用英美坐標(biāo)系,此時(shí)的動(dòng)力學(xué)模型為:
m(dV/dt)=Tcos(σ+α)cosβ-D-mgsinγ
mVcosγ(dχ/dt)=T[-cosμsinβcos(σ+α)+
sinμsin(σ+α)]+
Ysinμ+Ccosμ
mV(dγ/dt)=T[sinμsinβcos(σ+α)+
cosμsin(σ+α)]+Ycosμ-
Csinμ-mgcosγ
dq/dt= [-(Ix-Iz)pr-Izx(p2-r2)+
M+Te]/Iy
此外,需補(bǔ)充歐拉角的角度關(guān)系使模型封閉。
sinα={cosγ[cosφsinθcos(ψ-χ)+
sinφsin(ψ-χ)]-sinγcosφcosθ}/cosβ
sinβ=cosγ[sinφsinθcos(ψ-χ)-
cosφsin(ψ-χ)]-sinγsinφcosθ
sinμ={sinγ[sinφsinθcos(ψ-χ)-
cosφsin(ψ-χ)]+cosγsinφcosθ}/cosβ
這里,取代價(jià)函數(shù)為:
2 配平算法
2.1 自適應(yīng)變異算子人工魚(yú)群算法
人工魚(yú)群算法[7]是基于模擬魚(yú)類(lèi)隨機(jī)游動(dòng)、追尾、聚群、覓食等行為提出的一類(lèi)群體智能優(yōu)化算法。該算法思想源于自然界水域中的魚(yú)往往能自行或者尾隨其他魚(yú)找到食物,因而一般食物多的地方也存在較多魚(yú)的這一自然現(xiàn)象。其具有對(duì)初值與參數(shù)選擇不敏感、簡(jiǎn)單易實(shí)現(xiàn)和使用靈活等特點(diǎn),但隨著人們對(duì)該算法應(yīng)用領(lǐng)域的不斷拓展,一些缺點(diǎn)也顯現(xiàn)了出來(lái):參數(shù)采用固定值的這種做法在一定程度上擴(kuò)大尋優(yōu)范圍的同時(shí)也會(huì)減緩收斂速度;擁有很強(qiáng)的正反饋性,尋優(yōu)過(guò)程中能很快找到較優(yōu)解,但與此同時(shí)也使得種群的多樣性迅速喪失,易造成過(guò)早收斂,陷入局部最優(yōu),從而無(wú)法得到全局最優(yōu)解。考慮到這些缺點(diǎn)與不足,本文提出了一種新型自適應(yīng)變異算子的人工魚(yú)群算法。
2.1.1 自適應(yīng)步長(zhǎng)和視野
標(biāo)準(zhǔn)魚(yú)群算法采用了固定視野和步長(zhǎng),使得在優(yōu)化過(guò)程的初期具有較快的收斂品質(zhì),但在后期往往收斂較慢或者很難得到要求的精度。為了修正這一不足,這里采用如下解決方案:
(1)每次迭代計(jì)算出每條魚(yú)與魚(yú)群其他個(gè)體之間的距離,并將該距離的平均值作為其視野vvis;
(2)給出一個(gè)步長(zhǎng)系數(shù)a,把a(bǔ)vvis作為該魚(yú)的步長(zhǎng)s。
這樣,可保證在算法初期魚(yú)群比較分散時(shí)每條魚(yú)都有較大的視野和步長(zhǎng),保證了尋優(yōu)的全局性;而在后期,隨著魚(yú)群的聚集,每條魚(yú)的視野和步長(zhǎng)也隨之減小,可保證后期的收斂速度和精度。
2.1.2 感知作用
依據(jù)一些研究者對(duì)魚(yú)群運(yùn)動(dòng)過(guò)程中個(gè)體間相互作用的研究,每條魚(yú)自身都存在一個(gè)感知范圍,根據(jù)個(gè)體間相對(duì)距離遠(yuǎn)近分為排斥行為、平行游動(dòng)行為和吸引行為[8-11]。本文定義感知范圍ddis,并將魚(yú)群個(gè)體之間距離小于0.1ddis作為排斥距離rr,介于0.10ddis~0.25ddis之間作為平行游動(dòng)距離rp,介于0.25ddis~0.50ddis之間作為吸引距離ra,大于0.50ddis則沒(méi)有感知作用。對(duì)于魚(yú)A而言,當(dāng)魚(yú)B處于rr區(qū)域,此時(shí)表現(xiàn)為排斥作用,A會(huì)向B的反方向運(yùn)動(dòng);當(dāng)B處于rp區(qū)域,此時(shí)B會(huì)保持與A之間的距離而與A平行游動(dòng),此時(shí)A與B相對(duì)靜止;當(dāng)B處于ra區(qū)域,此時(shí)表現(xiàn)為吸引作用,A會(huì)向B的方向運(yùn)動(dòng),且假設(shè)魚(yú)群個(gè)體間的吸引作用要大于排斥作用。
2.1.3 領(lǐng)導(dǎo)模式和吸引度
本文將動(dòng)物群體中的領(lǐng)導(dǎo)模式和螢火蟲(chóng)算法的吸引度概念引入魚(yú)群行為中。設(shè)某一時(shí)刻個(gè)體魚(yú)A距離食物最近,其感知到的食物濃度為YA,此時(shí)A作為該魚(yú)群的“領(lǐng)導(dǎo)者”吸引食物濃度較低區(qū)域C內(nèi)的魚(yú)向其運(yùn)動(dòng),同時(shí),C區(qū)域內(nèi)的魚(yú)又會(huì)成為食物濃度更低區(qū)域的魚(yú)的“領(lǐng)導(dǎo)者”,并以此類(lèi)推。
水域中個(gè)體魚(yú)B能感知到的“領(lǐng)導(dǎo)者”A處的食物濃度YB=YAe-λdAB,其中,λ為衰減因子,dAB為A與B個(gè)體之間的距離。同樣,A對(duì)B的吸引度為βB=βAe-λdAB。其中,魚(yú)群“領(lǐng)導(dǎo)者”A的吸引度βA=1。隨著距離的增加,領(lǐng)導(dǎo)模式和吸引度都會(huì)有所減弱。
2.1.4 魚(yú)群變異
為克服上述現(xiàn)象,避免陷入局部最優(yōu)解,本文在尋優(yōu)過(guò)程解出的最優(yōu)值在5次迭代中都未發(fā)生改變的情況下做以下處理:
(1)為防止最優(yōu)魚(yú)所處位置為局部最優(yōu),從而能有效擺脫局部極值的束縛,對(duì)最優(yōu)魚(yú)進(jìn)行Gauss變異,即
Xbest-new=Xbest-old+Gauss(0,1)Xbest-old
式中,Gauss(0,1)為標(biāo)準(zhǔn)Gauss分布。
(2)為優(yōu)化群體保持魚(yú)群多樣性,克服標(biāo)準(zhǔn)魚(yú)群算法的早熟現(xiàn)象,對(duì)其他所有魚(yú)進(jìn)行遺傳算法交叉和變異進(jìn)化機(jī)制的操作,這樣在提高收斂速度的同時(shí)保證了全局搜索能力。
2.1.5 魚(yú)群行為描述
(1)魚(yú)群初始化
魚(yú)群的個(gè)體狀態(tài)位置Xi={xi}(i=1,2,…,n),其中xi為待優(yōu)化變量;目標(biāo)函數(shù)Y=f(X)。
(2)覓食行為
個(gè)體魚(yú)Xi以視野范圍內(nèi)隨機(jī)選擇另一個(gè)體魚(yú)Xj,若Yje-λdij>Yi,則Xj會(huì)吸引Xi向其身邊游動(dòng)。
Xi|next=Xi+βiRs(Xj-Xi)/dij-
0.3(1-βi)Dr+0.7(1-βi)Da
若不滿足該式,則個(gè)體魚(yú)Xi再尋找視野內(nèi)其他魚(yú);若個(gè)體魚(yú)Xi在最大嘗試次數(shù)中均未找到能滿足條件的其他個(gè)體魚(yú),則個(gè)體魚(yú)Xi執(zhí)行隨機(jī)行為。這里,定義R為(0,1)之間的隨機(jī)數(shù),Dr為該魚(yú)與其他所有魚(yú)之間的排斥作用引起的移動(dòng),Da為該魚(yú)與其他所有魚(yú)之間的吸引作用引起的移動(dòng)。
R的加入使個(gè)體魚(yú)Xi的移動(dòng)方向確定但是大小不定,目的是通過(guò)引入隨機(jī)因素以提高算法的魯棒性。
(3)聚群行為
個(gè)體魚(yú)Xi探索視野內(nèi)的魚(yú)群數(shù)目nf及中心位置Xc,如果Yce-λdic/nf>δYi(δ為擁擠度),表明魚(yú)群中心有較多食物且不太擁擠,則:
Xi|next=Xi+αcRs(Xc-Xi)/dic-0.3(1-αc)Dr+
0.7(1-αc)Da
否則,執(zhí)行覓食行為(這里人為規(guī)定魚(yú)群中心的吸引度要弱于領(lǐng)導(dǎo)模式下的吸引度,αc=0.8βc)。
(4)追尾行為
個(gè)體魚(yú)Xi探索視野內(nèi)的魚(yú)群數(shù)目nf及最優(yōu)魚(yú)位置Xb,如果Ybe-λdib/nf>δYi,表明當(dāng)前最優(yōu)魚(yú)所處位置的食物濃度較大且周?chē)惶珦頂D,則:
Xi|next=Xi+βbRs(Xb-Xi)/dib-0.3(1-βb)Dr+
0.7(1-βb)Da
否則,執(zhí)行覓食行為。
(5)隨機(jī)行為
個(gè)體魚(yú)Xi在其視野范圍內(nèi)隨機(jī)移動(dòng)一步,Xi|next=Xi+rvvis,其中r為區(qū)間(-1,1)的隨機(jī)數(shù)。
2.2 算法流程
(1)計(jì)算初始化,定義計(jì)算所需的初始條件;
(2)通過(guò)2.1.5節(jié)的魚(yú)群行為得出該次迭代下的代價(jià)函數(shù)最優(yōu)值;
(3)對(duì)該最優(yōu)函數(shù)值進(jìn)行判斷,若五次迭代中都未發(fā)生變化,則轉(zhuǎn)到步驟(5),若不滿足該條件則進(jìn)入下一次循環(huán)迭代;
(4)判斷是否達(dá)到最大循環(huán)迭代次數(shù),若滿足,則輸出計(jì)算結(jié)果,不滿足則返回步驟(2);
(5)對(duì)最優(yōu)魚(yú)進(jìn)行Gauss變異,其余的魚(yú)進(jìn)行遺傳交叉和變異,變異后的魚(yú)群重復(fù)步驟(2)的操作。
3 飛機(jī)下滑運(yùn)動(dòng)的配平算例
根據(jù)下滑約束條件,偏航角ψ=0°,航跡方位角χ=0°,航跡角γ=-4°,給出飛行參數(shù)的大致搜索范圍,并采用2.1節(jié)的算法初始條件對(duì)代價(jià)函數(shù)進(jìn)行尋優(yōu)。圖1~圖8為速度在40~80 m/s范圍內(nèi)飛機(jī)的下滑飛行參數(shù)配平值。
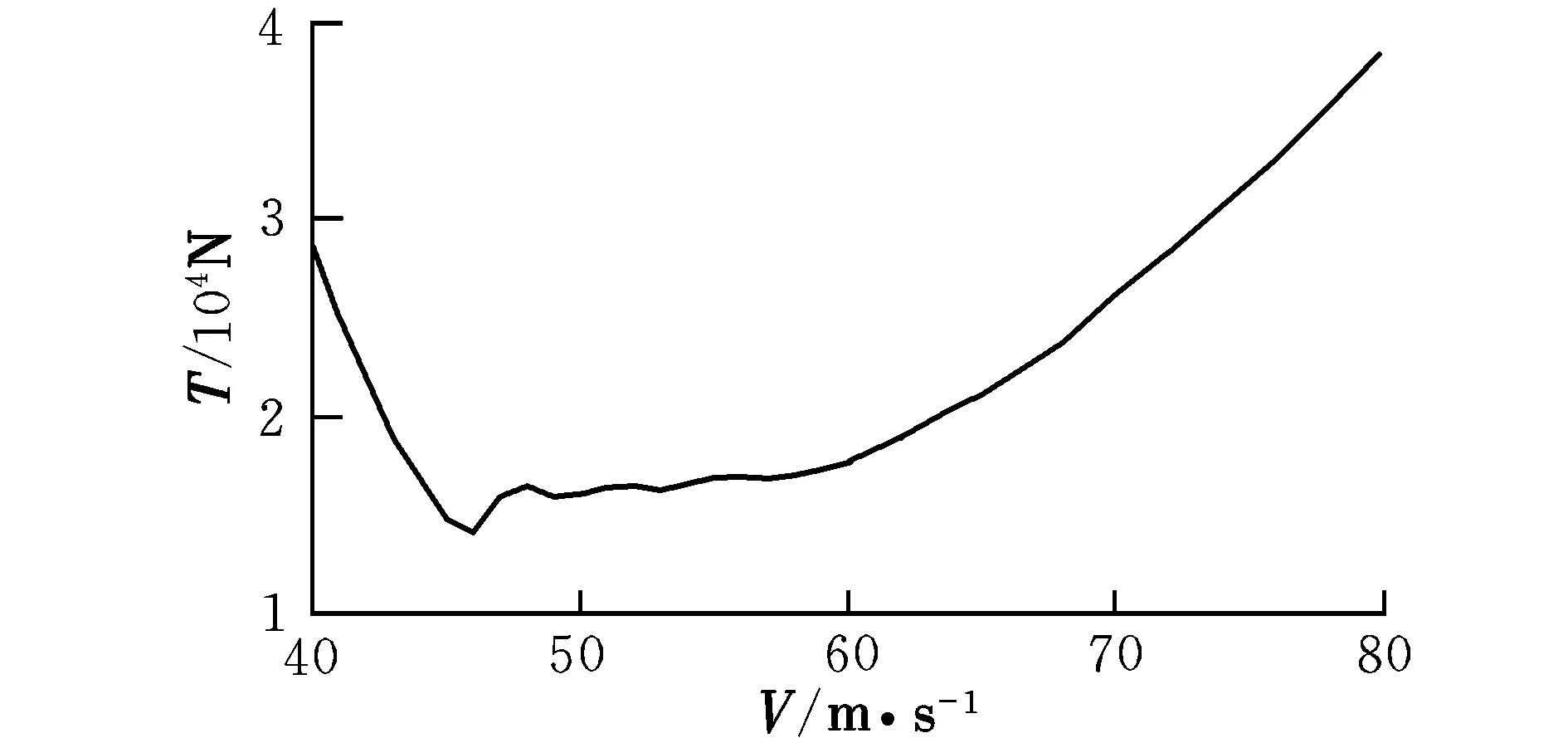
圖1 配平推力隨速度的變化曲線Fig.1 Trimming thrust with different velocities
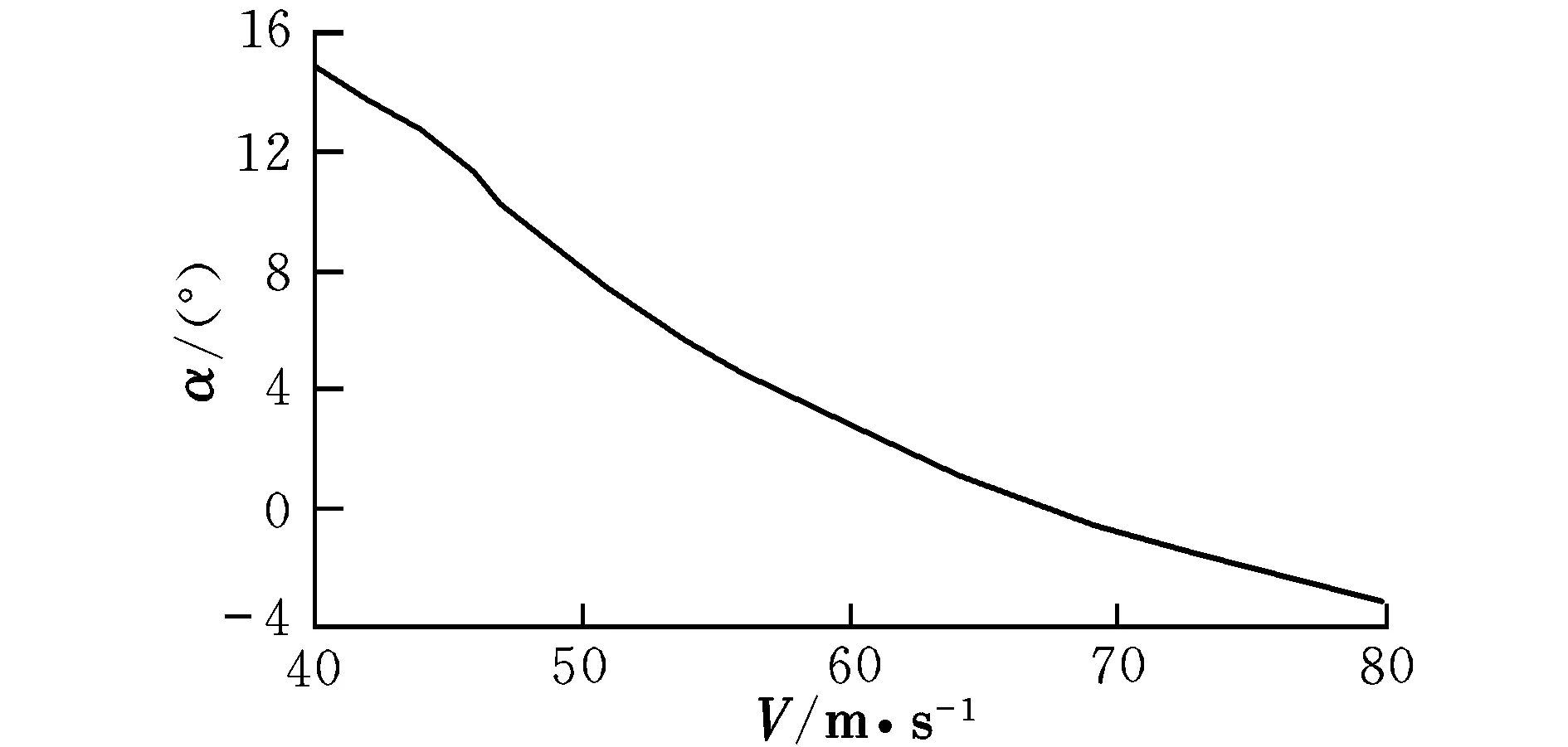
圖2 配平迎角隨速度的變化曲線Fig.2 Trimming attack angle with different velocities
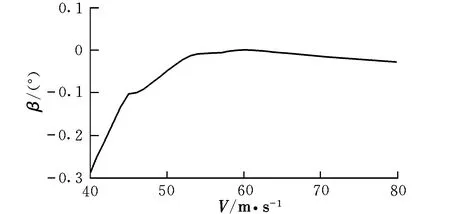
圖3 配平側(cè)滑角隨速度的變化曲線Fig.3 Trimming sideslip angle with different velocities
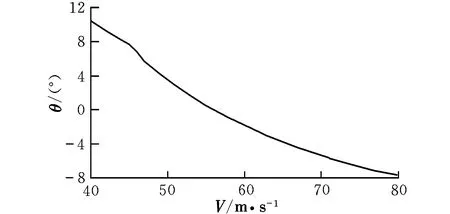
圖4 配平俯仰角隨速度的變化曲線Fig.4 Trimming pitch angle with different velocities
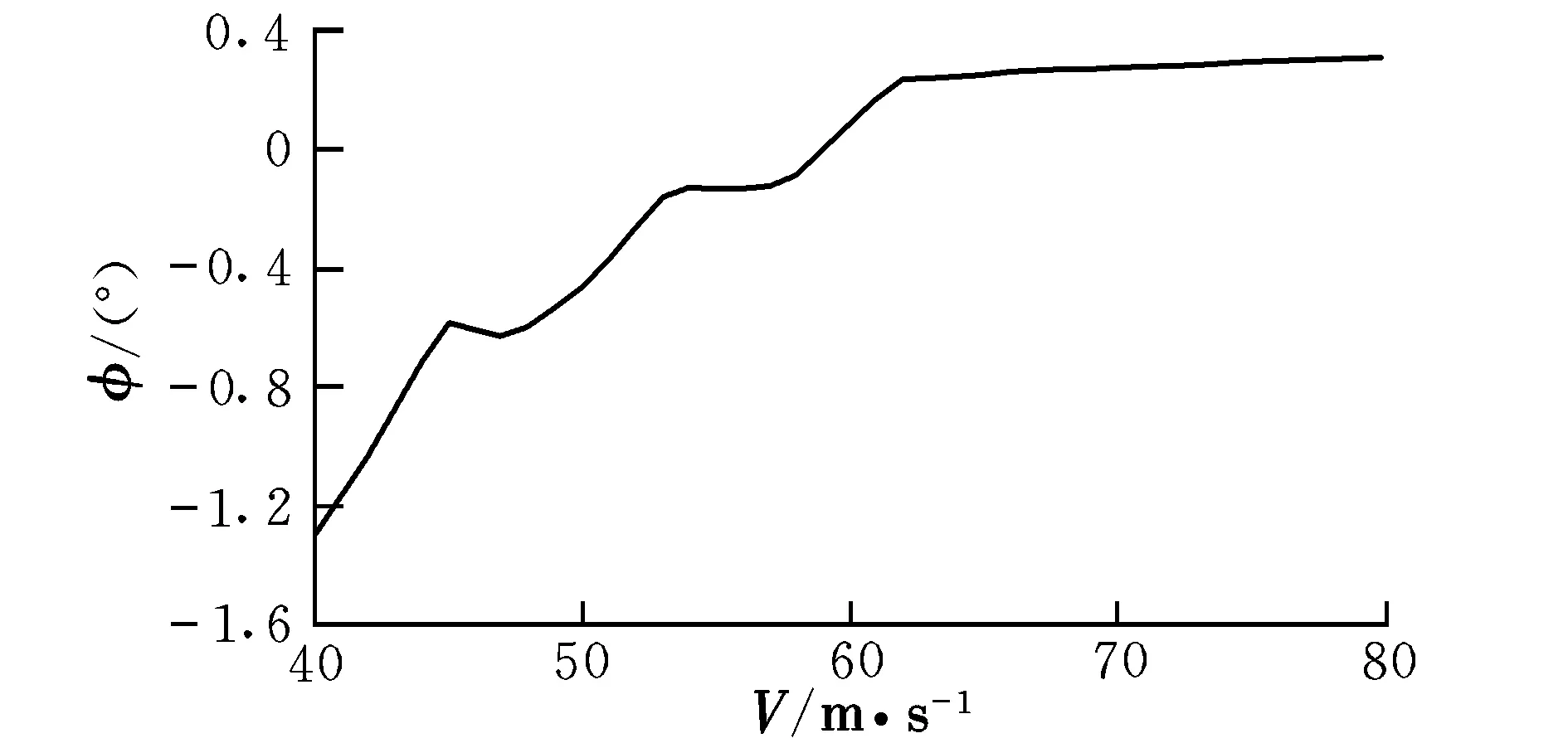
圖5 配平滾轉(zhuǎn)角隨速度的變化曲線Fig.5 Trimming roll angle with different velocities
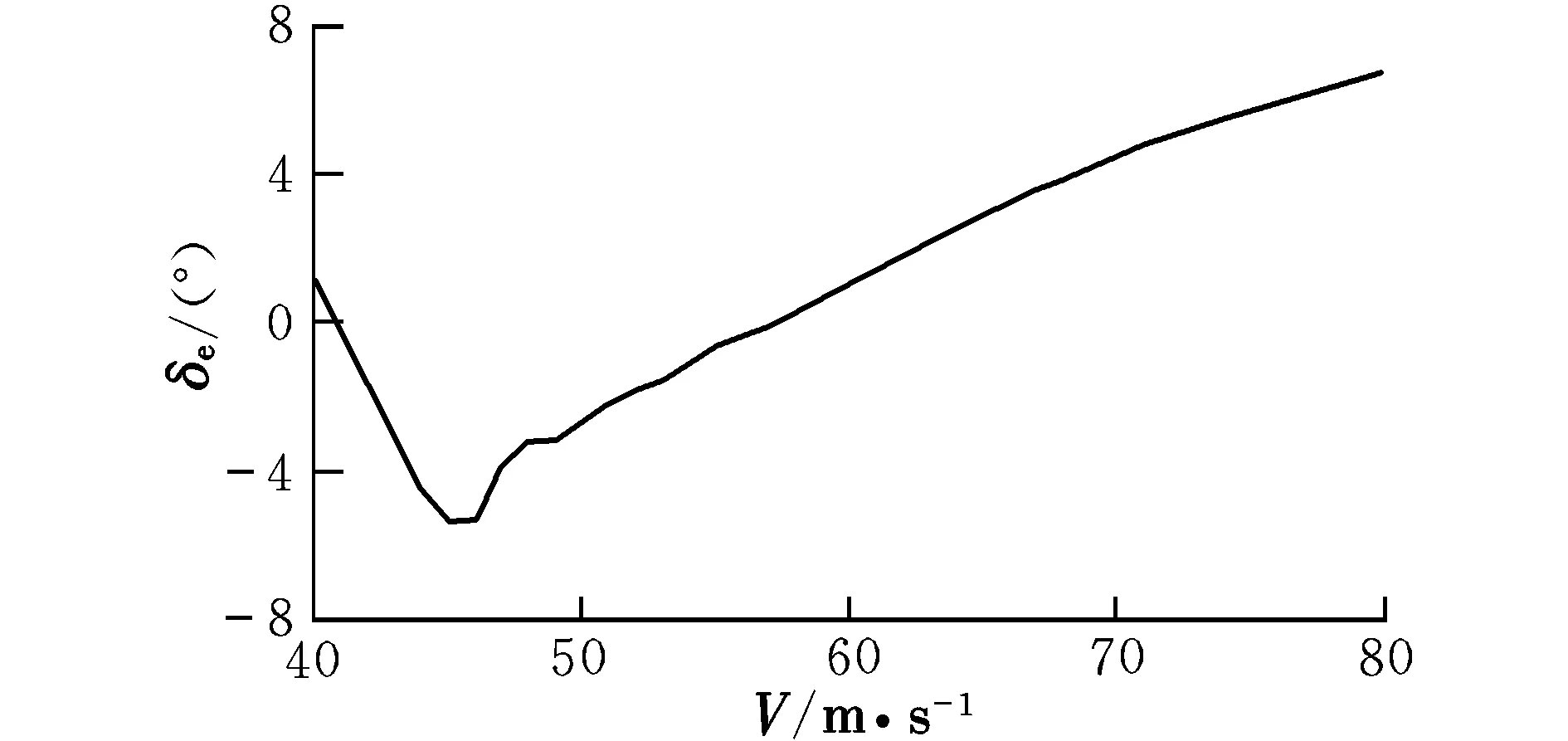
圖6 配平升降舵偏轉(zhuǎn)角隨速度的變化曲線Fig.6 Trimming elevator angle with different velocities
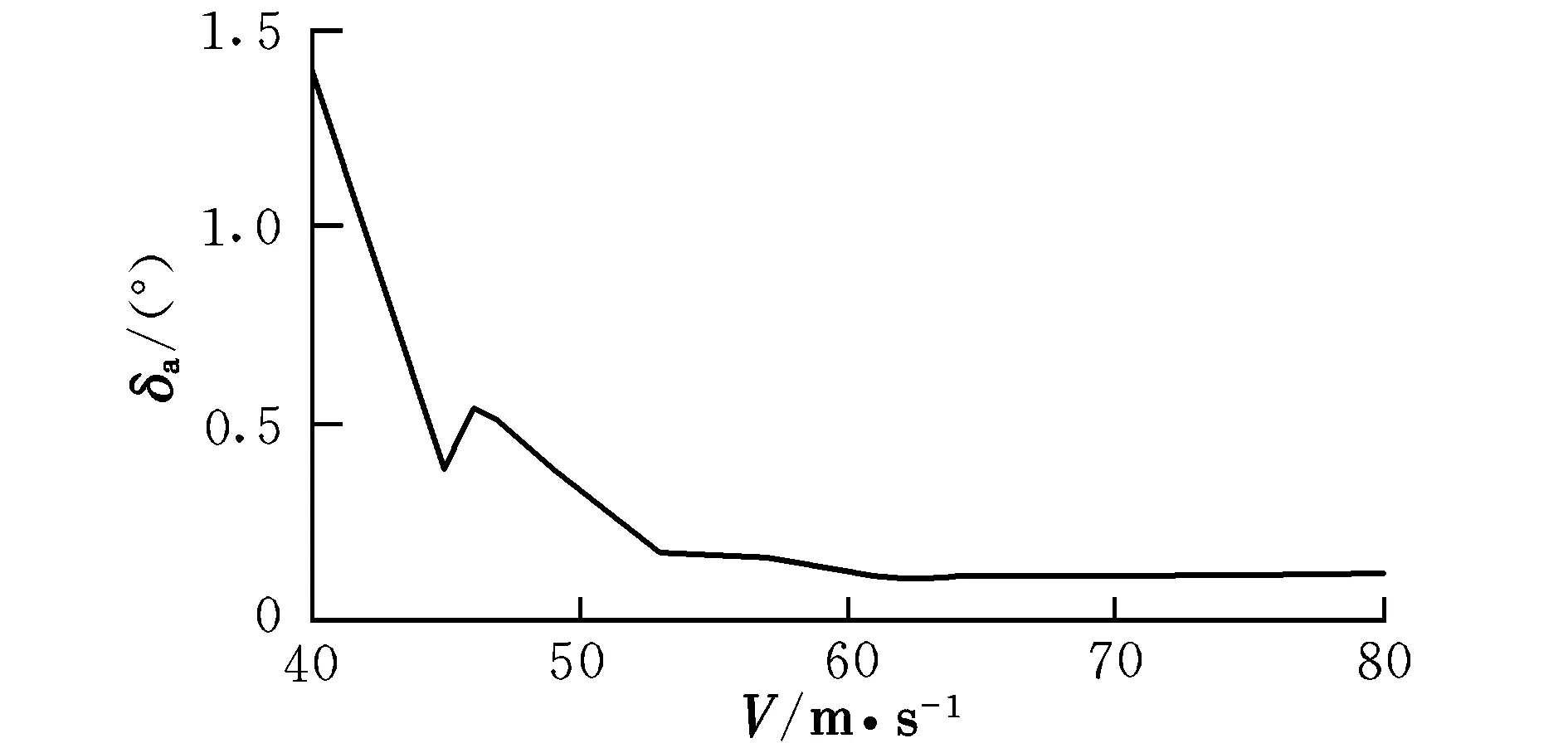
圖7 配平副翼偏轉(zhuǎn)角隨速度的變化曲線Fig.7 Trimming aileron angle with different velocities
圖8 配平方向舵偏轉(zhuǎn)角隨速度的變化曲線Fig.8 Trimming rudder angle with different velocities
由曲線圖可知,在低速狀態(tài)下,隨著速度的提高,升降舵偏角反而減小,這時(shí)需要飛行員向前推桿以穩(wěn)定飛行;在46 m/s之后,為保持在當(dāng)前定常下滑飛行過(guò)程,需飛行員向后拉桿,符合飛行員的操縱習(xí)慣,而之前則為反操作區(qū),該區(qū)域內(nèi)的飛行平衡狀態(tài)不可取。為了保持定常下滑狀態(tài),隨著速度的提高,俯仰角不斷變小,這是符合實(shí)際情況的。速度較小時(shí),側(cè)滑角及方向舵偏角需求越大,隨著速度的提高,在51 m/s后,側(cè)滑角保持在0°附近范圍內(nèi)的穩(wěn)定狀態(tài),而在53 m/s后,方向舵偏角也逐漸進(jìn)入穩(wěn)定狀態(tài)。實(shí)際飛行中,為了保持飛機(jī)對(duì)控制量的及時(shí)反應(yīng)并出于安全性的考慮,是不允許飛機(jī)存在側(cè)滑現(xiàn)象的,因此下滑速度選取應(yīng)在53 m/s之后。隨著速度的提高,迎角不斷減小,在67 m/s后會(huì)出現(xiàn)負(fù)迎角情況,考慮到正常飛行迎角為正,故飛行速度不宜高于67 m/s。因該算例飛機(jī)的失速迎角為8.1°,對(duì)比圖2可見(jiàn),該迎角對(duì)應(yīng)的失速速度約為50 m/s,而文獻(xiàn)[12]中規(guī)定,進(jìn)場(chǎng)下滑速度約為失速速度的1.1倍,因此,下滑初始速度為55 m/s。此飛行速度下對(duì)應(yīng)的飛行參數(shù)分別為:
[T,α,β,θ,φ,ψ,δe,δa,δr]=
[1.684×104,5.059°,-0.007°,0.558°,-0.136°,
0,-0.663°,0.164°,-0.111°]
該速度下各個(gè)參數(shù)在該機(jī)氣動(dòng)條件限制范圍之內(nèi),是合理的。
4 結(jié)論
本文在分析飛機(jī)定常下滑時(shí)平衡狀態(tài)基本特征的基礎(chǔ)上,提出了自適應(yīng)變異算子人工魚(yú)群算法的下滑配平新方法,得出的結(jié)論如下:
(1)針對(duì)人工魚(yú)群算法的不足,本文考慮了包括魚(yú)群個(gè)體之間的感知作用、群體的領(lǐng)導(dǎo)模式并結(jié)合螢火蟲(chóng)算法在內(nèi)的群體行為特點(diǎn)對(duì)魚(yú)群行為進(jìn)行完善。采用自適應(yīng)步長(zhǎng)和視野并引入了Gauss變異算子和遺傳算法,在一定情況下對(duì)魚(yú)群個(gè)體進(jìn)行變異操作。通過(guò)驗(yàn)證函數(shù)的測(cè)試表明,該算法在收斂速度、精度以及克服早熟能力方面都有了顯著的提高。
(2)引入代價(jià)函數(shù),將飛機(jī)下滑過(guò)程的配平問(wèn)題轉(zhuǎn)化為對(duì)代價(jià)函數(shù)最大值的求解問(wèn)題,并很好地解決了常規(guī)數(shù)值方法對(duì)初值依賴(lài)性高以及單一智能算法易陷入局部最優(yōu)等不足。仿真結(jié)果表明,該算法是一種有效的求解飛機(jī)平衡狀態(tài)的方法。
參考文獻(xiàn):
[1] Pashilkar A A.Algorithms for aircraft trim analysis on ground[R].AIAA-96-3505-CP,1996.
[2] 楊超,洪冠新.求解非線性代數(shù)方程組的一種建議方法[J].飛行力學(xué),1997,15(2):42-46.
[3] 沈宏良,劉昶.飛機(jī)平衡狀態(tài)的優(yōu)化計(jì)算方法[J].飛行力學(xué),2001,19(4):15-18.
[4] 王海濤,高金源.基于混合遺傳算法求解飛機(jī)的平衡狀態(tài)[J].航空學(xué)報(bào),2005,26(4):470-475.
[5] 張紅梅,張國(guó)山.求解高超聲速飛行器平衡狀態(tài)的GA-SQP算法[J].航空學(xué)報(bào),2012,33(1):138-146.
[6] 胡云安,左斌,李靜.基于退火遞歸神經(jīng)網(wǎng)絡(luò)的極值搜索優(yōu)化算法求解一類(lèi)碟式飛行器的平衡狀態(tài)[J].兵工學(xué)報(bào),2008,29(3):341-347.
[7] 李曉磊,邵之江,錢(qián)積新.一種基于動(dòng)物自治體的尋優(yōu)模式:魚(yú)群算法[J].系統(tǒng)工程理論與實(shí)踐,2002,22(11):32-38.
[8] Huth A,Wissel C.The simulation of movement of fish schools[J].Journal of Theoretical Biology,1992,156(3):365-385.
[9] Couzin I,Krause J James.Collective memory and spatial sorting in animal groups[J].Journal of Theoretical Biology,2002,218(1):1-11.
[10] Christianne Dalforno, Diego Mostaccio. Increasing the scalability and the speedup of a fish school simulator[R].ICCSA 2008,Part II,LNCS 5073,2008.
[11] Juan Carlos González,Christianne Dalforno.A fuzzy logic fish school model[R].ICCS 2009,Part I,LNCS 5544,2009.
[12] 中國(guó)航空工業(yè)發(fā)展研究中心.國(guó)外艦載機(jī)技術(shù)發(fā)展[M].北京:航空工業(yè)出版社,2008:10,70.
猜你喜歡
青少年科技博覽(中學(xué)版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學(xué))(2022年3期)2022-06-09 03:11:24
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學(xué))(2020年12期)2021-01-18 06:15:26
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學(xué)版)(2020年2期)2020-05-21 03:35:16
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學(xué)一年級(jí)版(2017年9期)2017-06-20 00:19:33