基于PSO的無人機協同攻擊動態資源分配
2014-09-15 07:54:56石嶺劉春生葉青馬艇
飛行力學 2014年4期
關鍵詞:分配
石嶺, 劉春生, 葉青, 馬艇
(南京航空航天大學 自動化學院, 江蘇 南京 210016)
0 引言
隨著信息化戰爭的到來,戰場環境變得愈加錯綜復雜。具有信息系統的無人作戰智能機(UAV)由于能夠充分利用自身機動性強、成本低、行動隱蔽性能好的優勢,在現代戰場上得到越來越廣泛的應用。現代無人機除了裝備有限數量的硬殺傷武器,如導彈、航炮等,通常還裝備有電子支援、電子對抗、誘餌彈等其他軟殺傷設備[1-2]。因此,無人機群一方面相互配合、相互協作,在使用硬殺傷武器的基礎上最大程度地對敵方目標進行摧毀;另一方面使用軟殺傷武器干擾敵方目標的機載雷達,以降低敵方作戰效能。
近30年來,國內外學者利用運籌學中的武器-目標分配(WTA)模型描述復雜的協同攻擊問題[3]。WTA模型研究分為靜態和動態兩類,目前對靜態模型研究的文獻較多。動態WTA模型可以分解為多階段靜態WTA過程,下一階段的武器目標分配根據上一階段分配反饋結果進行[4]。
由于軟殺傷設備的使用增加了無人機的決策負擔,它是一個約束條件多而復雜的優化問題,并且隨著問題規模的增加,其解空間呈指數級增加,成為一個多參數、多約束的NP問題[5]。傳統的數學方法難以保證在有限時間內得出最佳攻擊組合。粒子群優化算法(PSO)是近年來發展起來的一種新的啟發式算法[6],可以用于解決協同攻擊問題。這一算法相對于其他智能算法(如遺傳算法等)[7-8]而言,雖然也是通過迭代尋找最優解而且通過適應度來評價解的品質,但其規則更簡單,實現容易、精度高、收斂快、程序占用內存小,在解決實際問題中充分展示了優越性。國內外對粒子群優化算法的研究比較多,學者們對粒子群優化算法進行了各種改進[9-11],使得粒子群優化算法的優越性更加明顯。開展基于粒子群優化的無人機協同控制,對提升我國無人機的綜合攻擊效能并同時減少自身損失具有重要的意義。
本文針對空戰中軟殺傷武器系統和硬殺傷武器系統的無人機群最優協同攻擊問題,提出了一種動態資源分配的粒子群優化算法,通過建立動態WTA模型來解決復雜的協同攻擊問題。
1 機載軟硬殺傷武器無人機群的WTA數學模型
本文在已經獲取了敵我雙方武器目標價值的前提下,僅考慮敵我雙方在時間維度上的多階段協同攻擊問題。為了更清晰地描述動態協同攻擊過程,將簡化為兩個階段的協同攻擊:第一階段為分散火力打擊,對每個目標進行攻擊;第二階段在保持自身實力的前提下,對上一階段存活下來的敵方目標進行重點打擊。
第一階段:

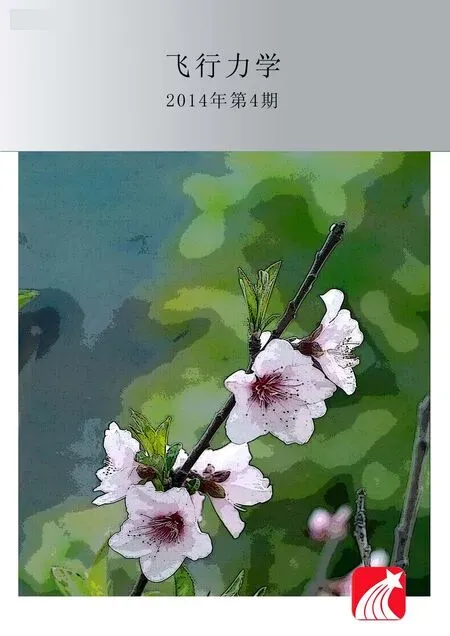
圖1 攻擊組合示意圖Fig.1 Cooperative attack frame
這一問題用WTA模型可以表示為:確定攻擊組合決策xtudj∈{0,1},滿足t∈{0,1,…,N},u∈{0,1,…,M},d∈{0,1},j∈{0,1};式中,下標t表示目標編號,u表示無人機編號。不同的d和j的組合形成了4種攻擊選擇,使得性能指標J盡量大。
(1)
式中,Ctudj為我方以某種攻擊選擇造成敵方的損失期望與敵方造成我方損失期望之差,其表達式為:
Ctudj=W1PtVtStudjKtu-
(2)

(1)對每架無人機指派一個攻擊目標:
(3)
對任意t∈{0,1,…,N}成立。
(2)誘餌彈數量不能超過誘餌彈的使用數量限制:
(4)
對d=1成立。式中,D為誘餌彈的使用數量限制。
第二階段:

(5)

(6)
此時,決策系統根據最新反饋得到的敵我雙方信息,如不改變攻擊策略,即按照第一階段性能指標繼續對攻擊組合進行配對尋優。此時性能指標不變,W1,W2,Pt,Ktu也不變。與第一階段的限制條件有所不同的是,為了保存實力,一架無人機可以攻擊多個目標,而受損較為嚴重的無人機可以機動保留;而對威脅較大(即目標值較大)的敵方目標可以優先進行攻擊。因此第二階段協同攻擊的限制條件為誘餌彈數量不能超過第一階段剩余的數量限制:
(7)
對d=1成立。式中,D′為剩余可用誘餌彈的數量。
2 動態資源分配的粒子群優化算法
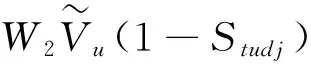
為應用粒子群優化算法進行資源的最優分配,首先需要明確每個粒子與解的對應關系。令X表示N維搜索空間,每一維n表示目標n對無人機的選擇,被選擇的無人機編號m為正整數,滿足m≤M,因此對s=[s1,s2,…,sN]T∈X,有sn|n∈{1,…,N}∈{1,2,…,M}成立,m=sn表示目標n選擇了無人機m執行攻擊任務,粒子與攻擊組合的對應關系示意圖如圖2所示。
圖2 粒子s與攻擊組合的對應關系示意圖Fig.2 Attack combination and particle mapping
本文通過粒子群優化算法解決動態資源分配的問題。根據敵方目標持續的時間,動態WTA問題可以分成許多時間段。每個時間段都允許我方根據目標最新反饋信息以及上一階段的結果分析進行資源分配和武器效能評估,如圖3所示。
圖3 動態資源分配模型示意圖Fig.3 Dynamic resource allocation frame
3 仿真計算

表1 U1攻擊目標的存活率Table 1 Probability of survival U1 against targets

表2 U2攻擊目標的存活率Table 2 Probability of survival U2 against targets

表3 U3攻擊目標的存活率Table 3 Probability of survival U3 against targets
表4 U4攻擊目標的存活率Table 4 Probability of survival U4 against targets
假設無人機的初始價值都為1,無人機對目標的殺傷概率如表5所示。
表5 無人機對目標的殺傷概率Table 5 Kill probability against targets
敵方4個目標V1,V2,V3,V4的價值分別為0.9,0.8,0.8,0.7。
第一階段:粒子群種群大小為30,迭代次數為500,利用Matlab進行仿真計算,圖4為干擾機和誘餌彈在沒有限制的條件下,無人機對目標協同攻擊的最優分配。該情況下的最優分配為:偽無人機13(即使用電子干擾機和誘餌彈的U4)被分配給目標1,偽無人機9(即使用電子干擾機和誘餌彈的U3)被分配給目標2,偽無人機1(即使用電子干擾機和誘餌彈的U1)被分配給目標3,偽無人機5(即使用電子干擾機和誘餌彈的U2)被分配給目標4。此時的性能指標J=1.481 2。
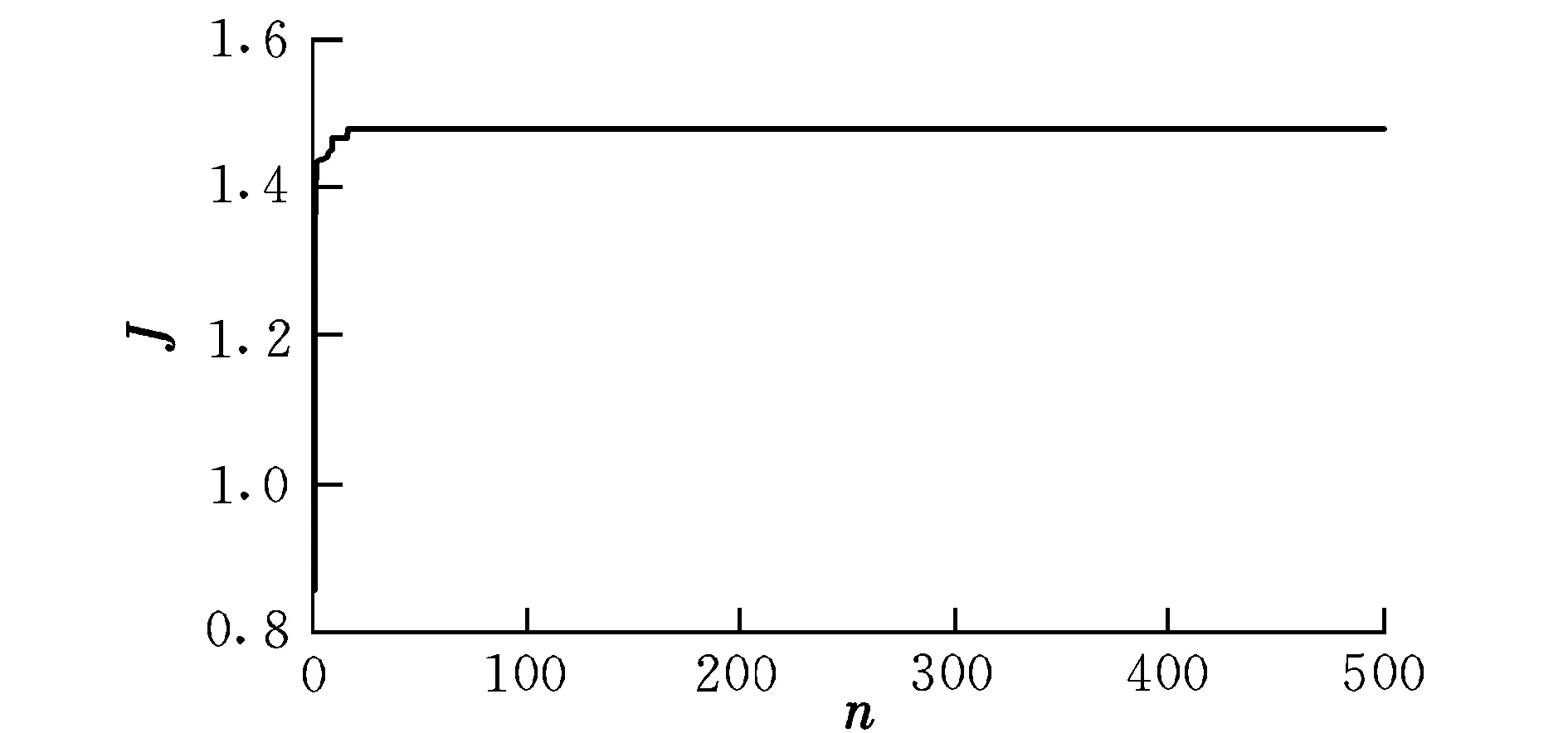
圖4 第一階段無人機對目標的最優分配Fig.4 Optimal allocation in stage 1

在Matlab仿真環境下,粒子群種群大小為30,迭代次數為1 000,繼續對第二階段的協同攻擊進行最優分配,尋優結果如圖5所示。圖5表明,在第二階段,偽無人機13(即使用電子干擾機和誘餌彈的U4)被分配給目標1,偽無人機15(即使用誘餌彈不使用電子干擾機的U4)被分配給目標2,偽無人機1(即使用電子干擾機和誘餌彈的U1)分配給目標3和目標4。此時的性能指標J′=0.201 19。
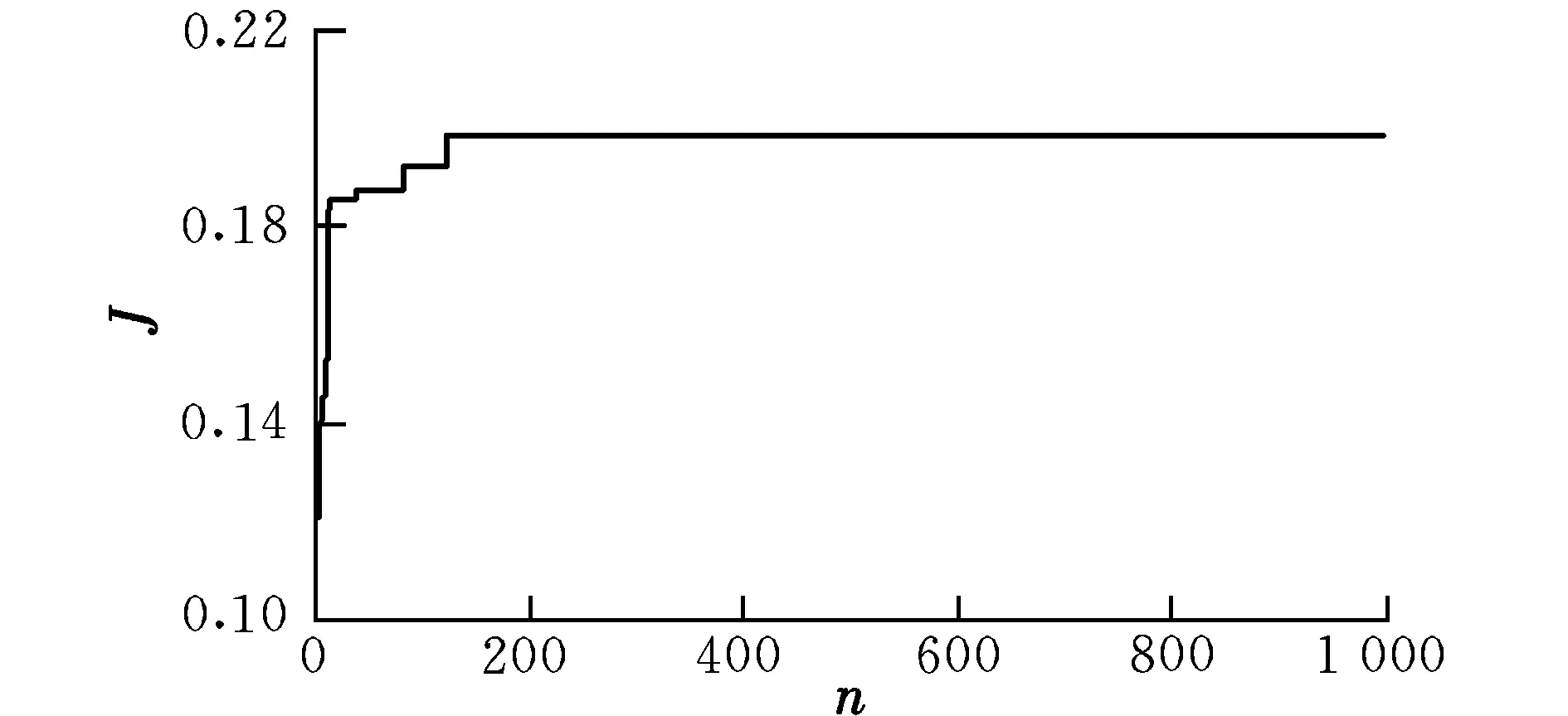
圖5 第二階段無人機對目標的最優分配Fig.5 Optimal allocation in stage 2
由仿真結果可以看出,粒子群算法易于實現且能夠很好地解決動態無人機群的協同攻擊問題。
4 結束語
本文對基于PSO的無人機協同攻擊動態資源分配問題進行了研究。仿真結果表明,粒子群算法能夠很好地解決戰爭環境中資源分配的問題。本課題還有以下方面需要繼續研究和改進:(1)可以增加對軟硬武器的數量及使用的限制;(2)進行協同攻擊時可以考慮白色目標的因素,減少對白色目標的影響。
參考文獻:
[1] Cruz Jr J B,Chen G,Li D,et al.Particle swarm optimization for resource allocation in UAV cooperative control[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit.USA:Providence,2004:1-11.
[2] 朱松,王燕.電子戰無人機發展綜述[J].航天電子對抗,2005,21(1):58-60.
[3] Manne A S.A target-assignment problem[J].Operations Research,1958,6(3):346-351.
[4] Ahuja R K,Kumar A,Jha K C,et al.Exact and heuristic algorithms for the weapon-target assignment problem[J].Operations Research,2007,55(6):1136-1146.
[5] Lloyd S P,Witsenhausen H S.Weapons allocation is NP-complete[C]//1986 Summer Computer Simulation Conference.Reno, NV,1986:1054-1058.
[6] Kennedy J,Eberhart R.Particle swarm optimization[C]//Proceedings of IEEE International Conference on Neural Networks.Perth,Western Australia,1995:1942-1948.
[7] Chen G,Cruz Jr J B.Genetic algorithm for task allocation in UAV cooperative control [C]//AIAA Conference on Guidance,Navigation,and Control.Austin,Texas,2003.
[8] 袁梅,凌明祥,曾慶雙.基于信息素遞減的蟻群算法的WTA 問題求解[J].計算機仿真,2008,25(2):23-25.
[9] 崔紅梅,朱慶保.微粒群算法的參數選擇及收斂性分析[J].計算機工程,2007,43(23):89-91.
[10] Nickabadi A,Ebadzadeh M M,Safabakhsh R.A novel particle swarm optimization algorithm with adaptive inertia weight [J].Applied Soft Computing,2011,11(4):3658-3670.
[11] Shi Y,Eberhart R.A modified particle swarm optimizer[C]//Evolutionary Computation Proceedings,IEEE World Congress on Computational Intelligence.IEEE,1998:69-73.
猜你喜歡
天水行政學院學報(2022年4期)2022-11-18 09:02:36
艦船科學技術(2022年13期)2022-08-11 09:30:02
鐵道通信信號(2020年9期)2020-02-06 09:15:22
漢語世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
中學生數理化·中考版(2018年10期)2018-12-07 00:44:52
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
中央社會主義學院學報(2017年1期)2017-04-16 05:34:07
中國衛生(2014年12期)2014-11-12 13:12:40