雙液壓缸同步精確控制技術(shù)研究
2014-10-10 09:45:14宋云艷
制造業(yè)自動化 2014年14期
宋云艷
SONG Yun-yan
(長春職業(yè)技術(shù)學(xué)院 工程技術(shù)分院,長春 130000)
0 引言
大型機械設(shè)備因布局、結(jié)構(gòu)等原因,常需要采用兩個液壓缸共同帶動負(fù)載進(jìn)行工作,因此要求兩個液壓缸速度保持一致,即需對其進(jìn)行同步控制。圖1為雙缸液壓提升系統(tǒng)結(jié)構(gòu),由于元件結(jié)構(gòu)誤差、壓力波動、外部干擾,流固耦合等因素的影響,常常出現(xiàn)同步誤差,使系統(tǒng)工作性能大大下降,甚至發(fā)生事故。為此,采用何種控制方式及控制策略,提高同步控制精度,是目前最受關(guān)注的問題。
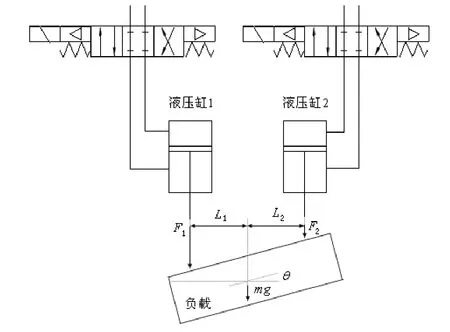
圖1 雙缸液壓提升系統(tǒng)結(jié)構(gòu)
目前應(yīng)用于液壓同步上的控制方法很多,大部分都采用主從控制方式[1],即以一個執(zhí)行元件的輸出信號為目標(biāo),對其他執(zhí)行元件進(jìn)行控制,實現(xiàn)同步的目的,這種方法可以取得較好的控制效果,但不適合負(fù)載變化很大的場合。在控制策略上,應(yīng)用最多的是PID控制[2],該方法簡單,易實現(xiàn),但因不能實時在線調(diào)整參數(shù),在應(yīng)用上受到很大的局限。本文以雙缸液壓提升系統(tǒng)為對象,對其同步控制方法進(jìn)行了深入研究,針對液壓傳動非線性、時變性的特點,提出采用交叉耦合控制方式,并把傳統(tǒng)PID與神經(jīng)網(wǎng)絡(luò)相結(jié)合,即單神經(jīng)元PID控制策略。仿真與實驗結(jié)果表明,所采用的方法可以獲得較好的同步精度,取得了預(yù)期的效果,有一定應(yīng)用價值。
1 雙缸液壓驅(qū)動系統(tǒng)數(shù)學(xué)模型
雙液壓缸提升系統(tǒng)是由兩個電液比例伺服閥控制完全相同的兩個液壓缸,實現(xiàn)對負(fù)載的提升,活塞與負(fù)載之間采用鋼索連接。為保證負(fù)載平穩(wěn)上升和下降,要求兩個液壓缸提升速度完全一致。為降低同步誤差,提高同步控制精度,首先對系統(tǒng)的動態(tài)特性進(jìn)行研究。對圖1中系統(tǒng)的負(fù)載進(jìn)行了受力分析,建立系統(tǒng)的數(shù)學(xué)模型[3,4]。
1.1 負(fù)載受力方程
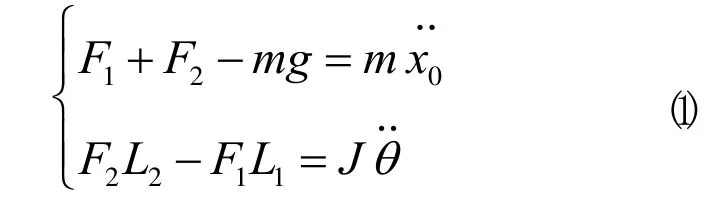
式中:F1,F(xiàn)2為液壓缸的提升力;x0為負(fù)載質(zhì)心位移;m為負(fù)載質(zhì)量;
L1,L2分別是兩液壓缸提升力對負(fù)載質(zhì)心的力臂;θ為負(fù)載繞質(zhì)心的轉(zhuǎn)角。
液壓缸的流量連續(xù)性方程:
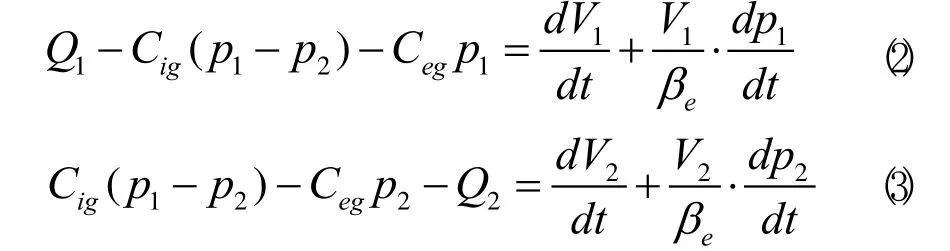
式中:V1,V2為液壓缸有桿腔、無桿腔容積;Cig,Ceg為缸體內(nèi)、外泄漏系數(shù);
βe為流體彈性模量;Q1,Q2為進(jìn)、出液壓缸流體流量。
2 雙缸同步控制策略研究
2.1 控制方式的選取
針對液壓系統(tǒng)非線性,時變性特點,采用交叉耦合控制方式,即兩個液壓缸都以一個理想的輸入為目標(biāo),進(jìn)行跟蹤控制[5,6];再把兩個輸出結(jié)果的差也作為一個附加的信號反饋到輸入端,從而實現(xiàn)輸入信號和偏差信號的耦合,如圖2所示。
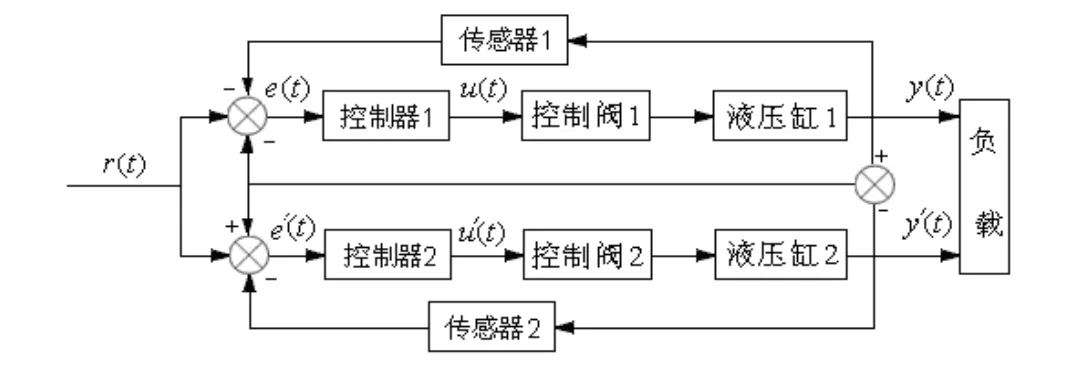
圖2 采用交叉耦合方式的雙缸同步控制系統(tǒng)方框圖
2.2 控制策略
2.2.1 神經(jīng)元控制
人工神經(jīng)元基于人腦神經(jīng)元的結(jié)構(gòu)與特征,可以看用是一種多輸入到單輸出的映射關(guān)系[7],若定義: 為神經(jīng)元的輸入,θ為神經(jīng)元的闕值, 為連接權(quán)強度,則總的輸出為:
式中:K為控制器的比例系數(shù);
ωi( k )為對應(yīng)于 xi( k)的連接權(quán)系統(tǒng)。
2.2.2 神經(jīng)元PID控制
PID控制是目前應(yīng)用較多的一種控制策略,具有結(jié)構(gòu)簡單、易于實現(xiàn)的特點,但其本身不具備在線調(diào)整參數(shù)的功能,所以單純采用PID控制難以保證其控制精度。針對這一問題,采用神經(jīng)元控制與PID控制相結(jié)合的控制策略,圖3為交叉耦合控制方法的單神經(jīng)元PID控制器結(jié)構(gòu)[8]。
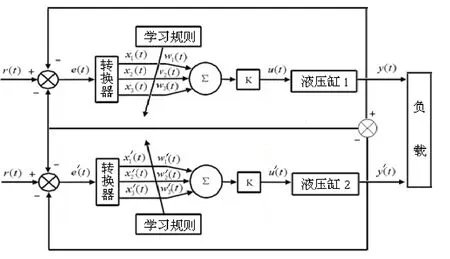
圖3 采用交叉耦合形式的單神經(jīng)元PID控制器結(jié)構(gòu)
在這個系統(tǒng)中,把兩個液壓缸活塞的位移偏差、速度偏差和無桿腔壓力差三個反饋信號,經(jīng)轉(zhuǎn)換后作為單神經(jīng)元PID控制器的輸入,連接權(quán)系數(shù)通過有監(jiān)督Delta學(xué)習(xí)規(guī)則進(jìn)行調(diào)整[9,10],其規(guī)則表達(dá)式為:

則可以得到單神經(jīng)元PID控制器的表達(dá)式為:

3 仿真與實驗
3.1 仿真分析
為了驗證控制策略的的合理性,把單神經(jīng)元與PID相結(jié)合的控制策略應(yīng)用于雙液壓缸同步控制系統(tǒng),并與傳統(tǒng)PID控制相對比,進(jìn)行MATLAB仿真。假設(shè)兩組提升系統(tǒng)中元件的結(jié)構(gòu)和參數(shù)完全相同,選取液壓泵排量為135mL/r,液壓缸直徑100mm,發(fā)動機的轉(zhuǎn)速1000r/min,負(fù)載500Kg,采用不同的控制策略和研究目標(biāo)進(jìn)行仿真。
1)以兩個液壓缸活塞的位移差作為控制變量
控制器利用兩個活塞的位移差分別去控制兩個比例閥的開口,改變進(jìn)入液壓缸流量,使活塞位移向理想目標(biāo)調(diào)整,位移差逐漸為零,實現(xiàn)同步控制。分別采用傳統(tǒng)PID和單神經(jīng)元PID策略進(jìn)行仿真,結(jié)果如圖4所示。
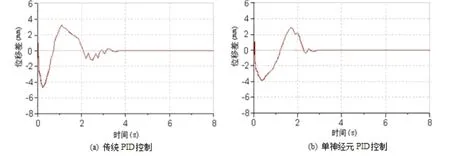
圖4 以活塞位移差作為控制變量的仿真結(jié)果
由于液壓油存在一定的慣性,所以在開始階段位移差會先增大,然后才慢慢減少,直至為零。從圖中可以看出,當(dāng)系統(tǒng)發(fā)生變化時,采用單神經(jīng)元PID控制策略能使系統(tǒng)更快地達(dá)到同步控制。
2)以系統(tǒng)壓力差作為控制變量
假設(shè)初始兩個液壓缸內(nèi)壓力相同,由于某種原因產(chǎn)生同步誤差時,將引起負(fù)載傾斜,從而使載荷不能平均分配到兩液壓系統(tǒng)中,最終導(dǎo)致兩個液壓缸內(nèi)壓力不一致,實驗結(jié)果如圖5所示。
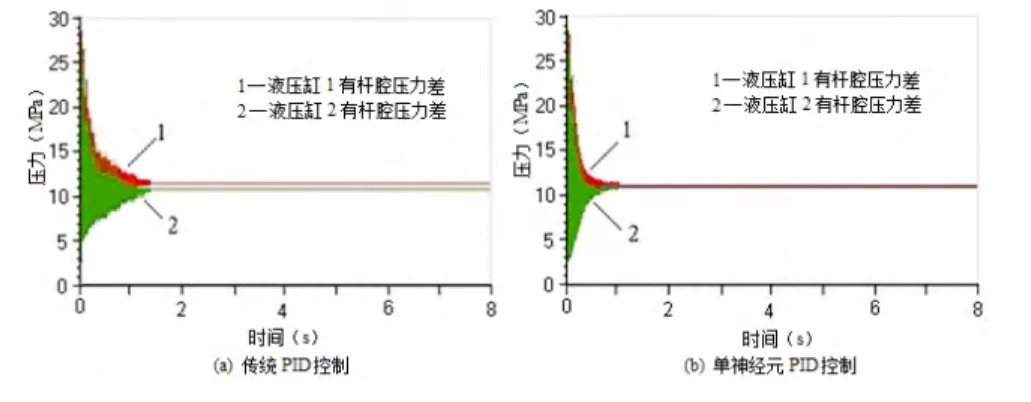
圖5 以系統(tǒng)壓力差作為控制變量的仿真結(jié)果
仿真結(jié)果表明,通過交叉耦合控制方式對活塞位移差,有桿腔壓力差進(jìn)行實時控制,可以有效消除偏差,實現(xiàn)同步控制的目的。兩種方法都能獲得很好的同步控制效果,但與傳統(tǒng)PID控制相比,單神經(jīng)元PID控制收斂速度更快,精度更高。
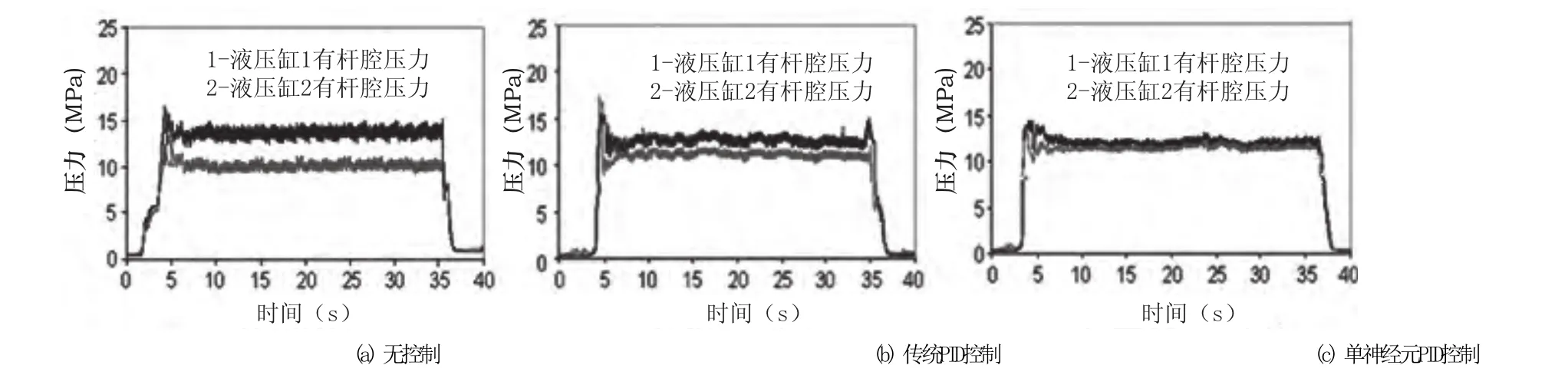
圖6 兩液壓缸壓力實驗對比曲線
3.2 實驗研究
為驗證所采用控制方法及仿真分析的正確性,利用實驗臺進(jìn)行測試,選用參數(shù)和步驟與仿真一致,得出實驗結(jié)果,如圖6所示。
實驗結(jié)果表明,當(dāng)不采用同步控制時,液壓系統(tǒng)中存在明顯的壓力差,說明有同步誤差存在。當(dāng)采用同步控制時,兩液壓缸中的壓力在同步控制器的作用下逐漸減小,同步誤差得到有效控制。實驗結(jié)果與仿真結(jié)果基本相符,從而驗證了仿真結(jié)果的正確性。
4 結(jié)論
通過對雙液壓缸同步系統(tǒng)的動態(tài)特性進(jìn)行分析,找出影響系統(tǒng)出現(xiàn)誤差的影響因素,為控制變量的選取提供依據(jù)。
1)采用交叉耦合控制方法把輸入信號和偏差信號進(jìn)行耦合,然后作為控制器的輸入,同時提出一種單神經(jīng)元PID控制策略應(yīng)用于雙缸液壓驅(qū)動系統(tǒng),克服了傳統(tǒng)PID控制策略不能在線整定的缺點。
2)利用兩個液壓缸活塞的位移偏差、速度偏差和無桿腔壓力差三個反饋信號作為神經(jīng)元連接權(quán)系數(shù),同時通過有監(jiān)督Delta學(xué)習(xí)規(guī)則對其進(jìn)行實時的在線調(diào)整,可以獲得很快的響應(yīng)速度。
3)在仿真及實驗過程中把單神經(jīng)元PID控制策略與傳統(tǒng)PID控制策略進(jìn)行對比,結(jié)果表明,單神經(jīng)元PID控制策略可以獲得更高的同步控制精度,同步誤差控制在要求范圍之內(nèi),達(dá)到預(yù)期目標(biāo),具有一定借鑒價值。
[1]丁意,趙克定,于金盈.雙缸同步控制系統(tǒng)的研究[J].流體傳動與控制,2007,(2):24-26.
[2]劉春芳,周璐,吳盛林.基于解耦控制的雙電液伺服系統(tǒng)同步技術(shù)研究[J].機床與液壓,2007(2):181-183.
[3]蘇東海,孫占文,單光坤. 液壓機雙缸同步系統(tǒng)數(shù)學(xué)建模的研究[J].流體傳動與控制.2008.3,7(2):41-44.
[4]李軍偉,趙克定,吳盛林.雙電液伺服以達(dá)同步模糊控制系統(tǒng)的研究[J].機床與液壓.2005,(1):115-117.
[5]劉曉峰,劉昕暉,王龍山,等.基于模糊PID控制的大型履帶起重機雙馬達(dá)速度同步控制[J].吉林大學(xué)學(xué)報.2011,41(3):659-664.
[6]S.Guo,L.Huang. Periodic oscillation for discrete-time Hopfield neural networks [J].Physics Lettesr A,2004.329(3):199-206.
[7]張世杰,曹喜濱.基于單神經(jīng)元自適應(yīng)PID控制的航天器大角度姿態(tài)機動[J].上海航天,2003,20(6):9-14.
[8]劉宇,劉杰,戴麗,張占一.基于神經(jīng)網(wǎng)絡(luò)和PID算法的數(shù)控機床并行混合控制模型[J].信息與控制,2006,35(1):30-33.
[9]趙路. 大型履帶式起重機卷揚液壓系統(tǒng)的動態(tài)特性研究[D].吉林.吉林大學(xué)機械科學(xué)與工程學(xué)院.2011.
[10]韓守習(xí),張大可.基于SIMULINK的起重機起升機構(gòu)動態(tài)仿真[J].土木建筑與環(huán)境工程,2003,25(6):67-73.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
