面向平順性與道路友好性的商用車懸架參數優化*
2014-10-11 07:42:02張志飛劉建利徐中明楊建國
汽車工程 2014年7期
張志飛,劉建利,徐中明,楊建國
(1.重慶大學,機械傳動國家重點實驗室,重慶 400030;2.重慶大學機械工程學院,重慶 400030)
前言
重型商用車駕駛員的乘坐舒適性直接影響行車安全,同時商用車對道路的破壞損傷必然引起公路維護費用的增加,且對貨物安全性和燃油經濟性也有一定影響,已經成為公路運輸亟待解決的重要問題[1-2]。文獻[3]中分析了車速、軸距、懸架剛度和阻尼等參數對道路破壞的影響,結果表明懸架參數對車輛的道路友好性影響較大,道路破壞系數隨剛度增加而增加,隨阻尼增加而減小;文獻[4]~文獻[6]中采用不同的控制策略對車輛進行懸架控制,實現了車輛平順性和道路友好性的共同改善;文獻[7]中采用遺傳算法對油氣懸架參數進行了優化,車輛的平順性明顯提高,而道路友好性改善幅度較小;文獻[8]中以車身垂向加速度和輪胎動載荷為優化目標,通過加權將各目標轉化為單目標優化函數,進而使用內點罰函數法進行優化,值得借鑒。
本文中首先使用Matlab/Simulink建立某款重型商用車9自由度動力學模型,以控制駕駛員的垂向振動、車架垂向振動和道路破壞為目標,采用層次分析法對各指標進行加權歸一化處理,然后利用iSIGHT優化平臺建立優化模型,并采用遺傳算法對懸架參數進行優化。
1 半車動力學模型
1.1 9自由度半車模型的建立
根據某重型商用車的實際結構,建立其9自由度半車動力學模型,如圖1所示。9個自由度包括駕駛員垂向、駕駛室垂向與俯仰、發動機垂向與俯仰、車架垂向與俯仰和前、后懸架簧下質量的垂向自由度。模型中駕駛室和發動機分別與車架相連,駕駛員與駕駛室的質心位置重合。
圖 1 中:zb、zc、ze、zs分別為駕駛員、駕駛室、發動機和車架的垂向位移;mb、mc、me、ms分別為駕駛員、駕駛室、發動機和車架的質量;θc、θe、θs分別為駕駛室、發動機和車架的俯仰角;Ic、Ie、Is分別為駕駛室、發動機和車架繞y軸的轉動慣量;Kb、Cb分別為駕駛員座椅的剛度和阻尼;Kcf、Kcr、Ker、Kef、Kf、Kr分別為駕駛室、發動機和車架前后懸剛度;Ccf、Ccr、Cef、Cer、Cf、Cr分別為駕駛室、發動機和車架前后懸阻尼;zuf、zur為前后簧下質量 muf、mur的垂向位移;zrf、zrr為前后路面激勵的垂向位移;Xcf、Xef、Xc、Xf、Xe、Xcr、Xer、Xs、Xr分別為各點到駕駛室前端的距離。
利用牛頓力學定律列出系統的運動微分方程組,其矩陣式為
式中:M、C、K分別為質量、阻尼和剛度矩陣;z為位移響應列陣;F為系統的激勵力,用路面位移列陣zr和輪胎剛度矩陣Kt表示。
1.2 路面模型的建立
采用帶有低通濾波器的隨機白噪聲來模擬前后輪受到的路面激勵[9]:
式中:f0為下截止頻率,取0.01;G0為路面不平度系數;v0為車速;w(t)為白噪聲信號。
對于半車模型,相對前輪路面輸入,后輪受到的激勵有一定的時間延遲,延遲時間τ=(Xr-Xf)/v0。
選擇B級路面仿真,取G0=64×10-6/m3,車速v0=20m/s,仿真時間為100s。生成的前輪路面輸入垂向位移如圖2所示,其均值為0。
2 懸架參數的優化設計
商用車的平順性和道路友好性均是評價其性能的重要指標。對于平順性來講,根據ISO2631—1:1997的規定,可采用總加權加速度均方根值對車輛平順性進行評價。本文中半車模型是以駕駛員垂向加速度作為評價指標,而車架質心垂向加速度在一定程度上對車輛平順性也有影響,同時可作為貨物安全性的評價指標,故也選作車輛的優化指標之一。
車輛道路友好性評價指標主要包括動載荷系數、動態載荷應力因子和95百分位四次冪和力評價指標。95百分位四次冪和力評價指標考慮了動載荷的相關性和空間重復性[10],用來評價車輛對道路的破壞更為合理,故選擇為優化指標之一。95百分位四次冪和力評價指標J定義為
2.1 基于層次分析法確定目標函數
為了兼顧車輛的平順性和道路友好性,應當使駕駛員的垂向振動和道路破壞系數J較小,而車架垂向振動視為平順性和貨物安全性的輔助評價指標。通過線性加權將以上3個優化指標轉化為總的單目標優化函數P:
2.1.1 確定各評價指標的主觀加權比例系數
各指標以優化目標函數P中車輛各性能指標的順序,綜合考慮其重要程度,利用層次分析法[13-14]確定其主觀加權比例系數。本文中確定以改善商用車道路破壞系數為最重要,駕駛員垂向振動次之,車架垂向振動為最后,通過反復仿真和結果分析,得到較優的一組比較矩陣:
假設駕駛員垂向加速度的權重系數為W1,默認其主觀加權比例系數為1,以其為量化標準,確定其他性能指標的主觀加權比例系數γi為
2.1.2 確定各評價指標的同尺度量化比例系數
由于駕駛員垂向加速度、車架垂向加速度和95百分位四次冪和力3個指標的數量級差異較大,無法直接比較,故須根據初始懸架仿真結果的統計數據,選擇各性能指標的均方根值作為依據,對它們進行同尺度量化處理。默認駕駛員垂向加速度的同尺度量化比例系數為1,確定其他性能指標的比例系數 βi為
2.1.3 確定各指標的總加權系數
綜合各評價指標的主觀加權比例系數γi和同尺度量化比例系數βi,確定總加權系數αi為
根據以上算法,各評價指標的總加權系數分別為:α1=1,α2=0.087 8,α3=0.212 7。
2.2 iSIGHT優化模型的建立
iSIGHT是一個仿真分析流程自動化和多學科多目標優化工具,它提供試驗設計和優化算法等一整套完整的優化軟件包,易于實現與其他軟件的集成優化[15],本文中基于該平臺建立集成優化模型。
優化模型中Matlab的主要任務是建立車輛動力學模型,而在iSIGHT中設置目標函數、優化變量、約束條件和求解算法,iSIGHT通過接口程序調用車輛Simulink模型進行計算,從而循環求解[16]。利用iSIGHT9.0建立的優化模型如圖3所示,模型中包含兩輸入文件,即剛度Gangdu.in和阻尼zuni.in文件,輸出包含優化目標函數文件P.out和動撓度約束條件fd1.out與fd2.out文件,中間求解器選用MATLAB.exe。
2.3 優化變量和約束條件
懸架的剛度和阻尼對車輛的平順性和道路友好性影響最為顯著,以前、后懸架的剛度和阻尼為優化變量。剛度優化的取值范圍根據重型貨車的偏頻來確定,前懸滿載偏頻范圍為1.50~2.10Hz,后懸滿載偏頻范圍為1.7~2.17Hz[17],而阻尼優化的范圍按照與剛度初始值擴大相同的比例來確定。各優化變量初始值和范圍如表1所示。
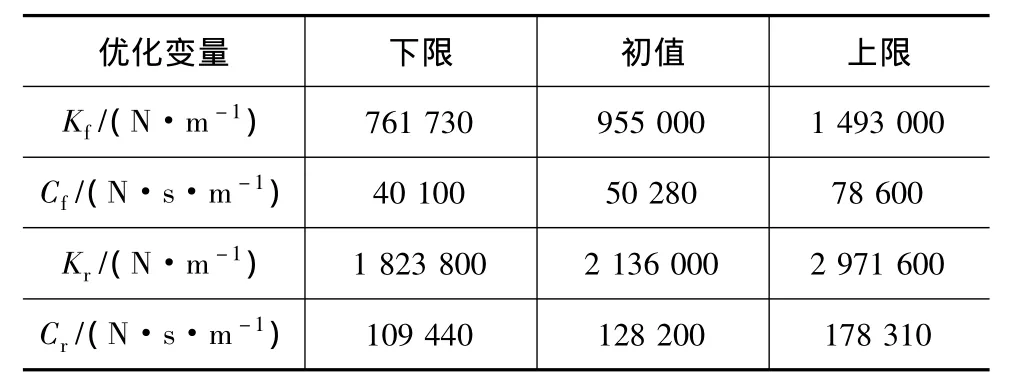
表1 優化變量的范圍
為防止車輛行駛時經常碰撞緩沖塊,使平順性變差,須對前后懸架動撓度進行約束,即
式中:fd1、fd2分別為前后懸架動撓度的標準差;[fd1]、[fd2]分別為前后懸架限位行程,均取90mm。
3 仿真與結果分析
由于遺傳算法具有魯棒性、全局最優性、高效并行性、不要求函數連續可導等特點,近年來在車輛懸架方面的應用越來越多。對于本文的單目標優化問題,選擇多島遺傳算法來實現,種群數量50,島數10,遺傳代數50,交叉概率0.9,變異概率0.01,遷移概率0.5,遷移間隔5。
經過1 005次計算,目標函數值隨迭代次數的變化如圖4所示。由圖可見,目標函數有明顯的降低,結果收斂,終值為0.596 5。
通過優化得到各個優化變量的結果見表2。由表可見:優化后前懸的剛度和阻尼變化明顯,剛度減小,而阻尼增大,即前懸偏頻降低,阻尼比增大,懸架的舒適性提高;后懸的剛度和阻尼均有一定程度降低,偏頻和阻尼比基本保持不變。
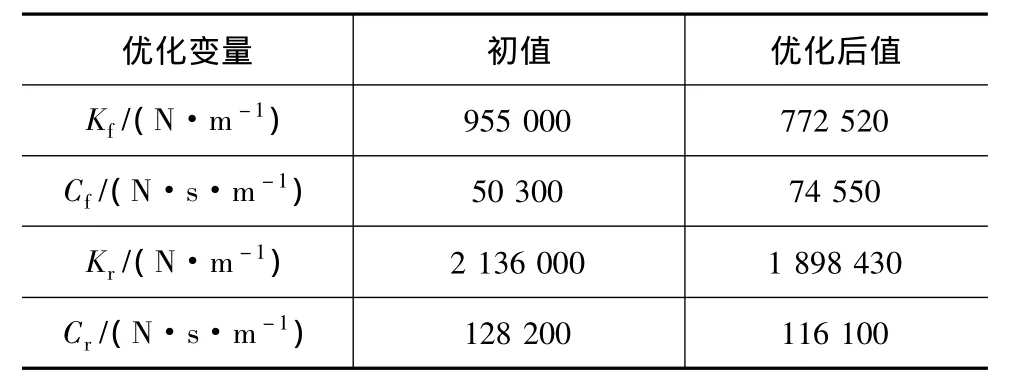
表2 優化變量結果對比
各個指標的優化結果如表3所示。由表可見:各性能指標均有所降低,駕駛員垂向振動得到了明顯的抑制;95百分位四次冪和力評價指標降低了6.70%,從而減輕了車輛對路面的破壞;車架質心垂向振動也有所降低,一定程度減小了貨物的振動和車架傳遞至駕駛員的振動。
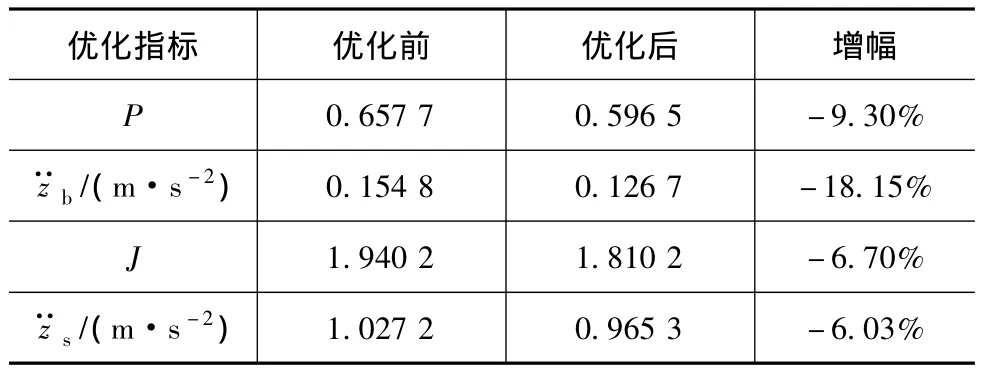
表3 優化前后各指標均方根值對比
駕駛員垂向加速度的功率譜如圖5所示,在低頻和高頻處均有降低,乘坐舒適性得到改善;前后輪動載荷的時域仿真結果如圖6和圖7所示,二者幅值均有所減小,且前輪降低幅度比后輪大;車架質心垂向加速度功率譜如圖8所示,在低頻段有一定的降低。可見通過該方法進行懸架參數優化,車輛的平順性和道路友好性均得到有效提高。
4 結論
(1)利用Matlab/Simulink建立了包含駕駛員、駕駛室、發動機和承載車架在內的9自由度半車動力學模型。以駕駛員垂向加速度、車架垂向加速度和95百分位四次冪和力為性能優化指標,采用層次分析法確定各指標的加權系數,并將各指標轉化為單目標優化函數。
(2)基于iSIGHT優化平臺建立集成優化模型,利用遺傳算法進行懸架參數優化。優化后駕駛員垂向加速度均方根值降低了18.15%,95百分位四次冪和力評價指標降低了6.70%,車架質心垂向加速度也有一定降低,車輛的平順性和道路友好性得到了較好的改善。
[1] 徐中明,張志飛,賀巖松,等.重型卡車駕駛室乘坐舒適性研究[J].中國機械工程,2004,15(17):1584-1586.
[2] 鄭仲浪,呂彭民.基于舒適性及道路友好性的拖掛車輛懸架參數優化方法[J].交通運輸工程學報,2009,9(5):49-54.
[3] 徐斌,鄭鋼鐵,范軼,等.道路破壞的影響因素及懸架參數優化[J].汽車工程,2000,22(6):418-422.
[4] Valá?ek M,Kortüm W,?ika Z,et al.Development of Semi-active Road-friendly Truck Suspensions[J].Control Engineering Practice,1998(6):735-744.
[5] 陳一鍇,何杰,張衛華,等.多軸重型貨車懸架系統改進天棚控制策略[J].農業機械學報,2011,42(6):16-22.
[6] 嚴天一,劉大維,陳煥明,等.基于主動懸架系統車輛的道路友好性[J].機械工程學報,2007,43(2):163-167.
[7] 杜恒,魏建華.基于遺傳算法的連通式油氣懸架平順性與道路友好性參數優化[J].振動與沖擊,2011,30(8):133-138.
[8] 呂彭民,和麗梅,尤晉閩.基于舒適性和輪胎動載的車輛懸架參數優化[J].中國公路學報,2007,20(1):112-117.
[9] 陳杰平,陳無畏,祝輝,等.基于Matlab/Simulink的隨機路面建模與不平度仿真[J].農業機械學報,2010,41(3):11-15.
[10] 陳一鍇.基于道路友好性的公路重型貨車懸架系統多領域協同控制與優化研究[D].南京:東南大學,2007.
[11] Cole D J,Cebon D.Truck Suspension Design to Minimize Road Damage[J].Instn Mech.Engrs,Part D,1996,210(D0):95-107.
[12] Potter T E C,Cebon D,Cole D J.Assessing‘Road-Friendliness’:a Review[J].Proc.Instn Mech.Engrs,Part D,1997,211(D0):455-475.
[13] 陳士安,邱峰,何仁,等.一種確定車輛懸架LQG控制加權系數的方法[J].振動與沖擊,2008,27(2):65-69.
[14] 楊益民,楊緒兵,景奉杰.層次分析法中整體一致性判別與校正[J].武漢大學學報(理學版),2004,50(3):306-310.
[15] 胡文婕,陳亮.基于iSIGHT的汽車盤式制動器多學科設計優化[J].農業機械學報,2010,41(5):17-20.
[16] 劉輝,蔡仲昌,曹華夏,等.基于iSIGHT平臺的車輛動力傳動系統聯軸器剛度優化研究[J].兵工學報,2012,33(2):227-231.
[17] 王望予.汽車設計(4)[M].北京:機械工業出版社,2004.
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
房地產導刊(2022年5期)2022-06-01 06:20:14
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
汽車電器(2018年1期)2018-06-05 01:22:54
公民與法治(2016年4期)2016-05-17 04:09:26
