采用光流場運動估計的雙樹復小波域視頻水印算法
2014-10-11 06:23:24崔壯呂俊白
華僑大學學報(自然科學版) 2014年4期
崔壯,呂俊白
(華僑大學 計算機科學與技術學院,福建 廈門361021)
隨著網絡技術的發展,數字視頻水印技術成為了當前水印研究的一個熱點.然而,數字視頻序列不同于靜態圖片載體,每個視頻序列幀之間具有一些固有的特征,這導致視頻水印技術的發展落后于數字圖像水印技術.視頻水印按嵌入的時間不同,分為基于原始視頻的水印嵌入和基于壓縮視頻的水印嵌入[1].基于原始視頻的嵌入是指對未經編碼的視頻序列進行處理,如文獻[2]在傳統的差分能量水印算法基礎上,通過在水印嵌入過程中引入能量分布公式,改進傳統的差分能量水印算法,增加了嵌入的有效性和水印的穩健性 .文獻[3]中首先對壓縮視頻進行解碼,利用水印分層的思想,將灰度水印圖像自適應地嵌入于離散余弦變換(DCT)系數中.基于視頻的水印嵌入技術與以圖像為載體的水印嵌入技術最大的不同之處在于載體的運動性.根據相關的心理視覺研究表明,人眼對各種環境有不同的敏感性.例如,由于人類視覺的惰性,對運動的物體比較敏感,但對高速運動物體的細節部分則不是很敏感.基于此,本文根據人眼視覺敏感特性,提出一種將水印嵌入于載體快速運動區域塊的水印算法.
1 雙樹復小波變換
自21世紀80年代開始,小波理論研究工作日臻完善,應用的領域也不斷擴大.然而,傳統離散小波變換(DWT)卻有著明顯的不足,即平移敏感性和方向選擇缺乏 .這些缺陷可能使小波在提取信號特征時丟失一些重要的信息.為了克服DWT的這些缺陷,Kingsbury等[4-5]提出了具有平移不變性和多方向選擇性的雙樹小波復小波變換(DT-CWT).它是通過兩個獨立的小波變換并行作用于信號實現實部(tree-A)和虛部(tree-B)運算的.
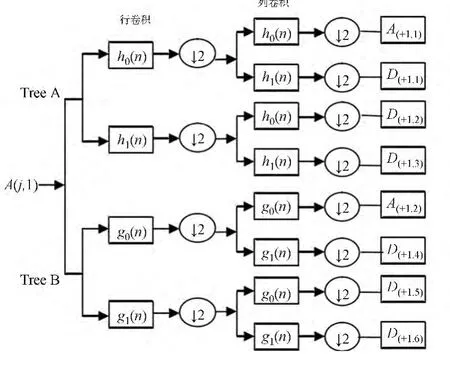
圖1 二維DT-CWT分解圖Fig.1 2-D DT-CWT decomposition
圖1為二維DT-CWT分解框圖 .其每一級的分解產生2個低頻子帶(用于下一尺度上的系數計算)和6個方向(±15°,±45°,±75°)的高頻子帶,D維的雙樹復小波變換的冗余度為2D∶1.
2 算法的實現
2.1 光流場
光流[6]的基本原理是,利用不同圖像序列中的各像素位置強度隨著時間的變化而改變,同時相鄰序列中的像素又具有強相關性等特性來確定每個像素位置的“運動”.即反映圖像的灰度在時間上的變化與景象中物體結構及其運動的關系.光流場是圖像灰度模式的表觀運動,是一個二維矢量場,所包含的信息就是各個像素點的瞬時運動速度矢量信息.
文中采用微分光流計算的代表方法Horn-Schunck算法[7],來計算每一個視頻幀的光流場信息.該算法的基本思想是在求解光流信息量時,要求光流本身盡可能地平滑,即引入對光流的整體平滑性約束來求解約束方程的病態問題.利用Horn-Schunck算法計算的foreman視頻序列的第6幀和第63幀的光流計算結果,如圖2所示.
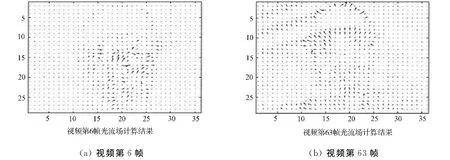
圖2 Horn-Schunck算法的光流場計算仿真實驗Fig.2 Optical flow calculating simulation in Horn-Schunck
2.2 基于光流場的視頻關鍵幀提取
一個視頻鏡頭是由一些連續、漸變的幀所組成,關鍵幀就是反映了這段鏡頭里面主要內容的關鍵圖像幀.文中選擇Wolf所提出的極小值算法來提取關鍵幀.Wolf算法通過光流分析來計算視頻幀中的運動量,在運動量局部最小值處選取關鍵幀,這些關鍵幀反映了視頻數據的靜止狀態[8].該視頻幀的總光流M(t)為

式(1)中:u,v為該視頻幀中光流矢量的兩個分量.
Foreman視頻序列中的每一幀圖片光流場量所連成的曲線圖,如圖3所示 .根據Wolf算法選取光流曲線圖中的極小值點所在的幀圖片作為水印嵌入的關鍵幀.同時,考慮到不同的幀圖像間的橫向比較,算法選取總光流最大的P幀作為嵌入水印的關鍵幀.
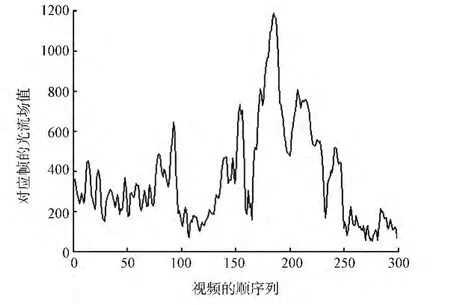
圖3 視頻序列的光流場計算曲線Fig.3 Calculating curve in optical flow of the video
2.3 視頻幀重要系數的提取
因為光流可以表征物體運動情況,對物體的運動區域進行估計,光流法求出的不同位置上的光流矢量越大,代表這個位置上的運動速度越快 .那么,這些位置上人眼的敏感性就會最弱,進行水印的嵌入也是最合適的.文中選取每個關鍵視頻幀中系數值最大的位置作為重要系數用于嵌入水印.視頻幀重要系數的提取有如下3個具體步驟.
1)對每一個Wolf算法所提取的關鍵幀再次進行光流場的計算.
2)對計算得到的光流信息矩陣進行降維后按照升序排序.
3)選擇排序前N位作為重要系數用于水印嵌入,達到在每個所選取的關鍵幀中嵌入一個小的水印分塊的目的,即實現將水印分塊嵌入于視頻幀的子塊中.
2.4 水印的嵌入
水印嵌入利用圖像的分塊嵌入原則,將分塊后的子水印信息嵌入于每一個視頻幀的重要系數中,有效保證水印算法的不可見性 .水印嵌入有如下4個具體步驟.
1)對原始水印W圖像進行置亂加密,置亂次數作為密鑰記為key1.
2)將置亂后的水印圖像分成小塊,并將其按行優先排序標號,分別記為w1,w2,…,wk.
3)對選取的每個關鍵幀的重要系數進行2次雙樹復小波變換,選擇低頻子帶,對其進行分塊,在每個小塊中嵌入1bit位的水印信號,將具體的水印嵌入位置進行加密,記密鑰為key2.
4)對每個低頻的分塊子圖按照關系特征關系的方法進行水印的嵌入,具體的嵌入公式為

式(2)中:Mi為第i個小塊中水印嵌入位置的系數;Ii為原始載體第i個小塊;ave(Ii)為小塊系數的均值;wi為第i位上的水印信號值.
2.5 水印的提取
水印的提取過程就是嵌入關系的逆過程,有如下2個具體步驟.
1)選取關鍵幀的重要系數進行2次雙樹復小波變換,并對低頻子帶進行2×2分塊.
2)根據密鑰找到水印的嵌入位置,對比每個小塊內嵌入系數與均值間的關系,提取出水印信號,有

3 實驗結果
實驗以MATLAB 7.10.0為平臺,使用的水印為具有意義的二值水印圖像,載體序列是300幀的Foreman視頻序列和478幀的Friends視頻序列.采用峰值信噪比(RSN)和誤碼率(Ec)為客觀評價標準,其計算式為

式(4)中:f,f′為計算的兩幅圖像矩陣;M,N為矩陣的行數和列數;wi,j為原始的水印信號;w′i,j為提取出的水印信號.
3.1 不可見性實驗
水印的不可見性就是要求視頻在嵌入水印后,在視覺上無法感知水印的存在.Foreman視頻序列第10幀圖像和Friends視頻序列第224幀圖像嵌入水印前后的載體視頻幀對比,分別如圖4,5所示.從圖4,5可知:圖像幾乎看不出嵌入水印后載體的變化,說明算法的圖像視覺效果很好.
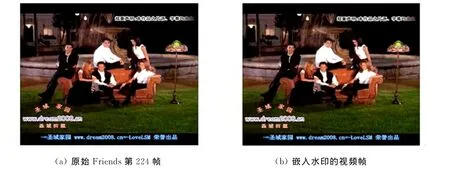
圖5 Friends視頻序列第224幀圖像嵌入水印前后的視頻幀嵌入對比Fig.5 Video of friends after embedded in 224th frame
嵌入載體后,圖像亮度分量上的峰值信噪比(RSN)變化情況,如圖6所示 .從圖6可知:嵌入水印后的Foreman和Friends視頻的RSN平均值分別為43.287 3,44.619 9,說明嵌入水印后的視頻序列具有很好的不可見性.
3.2 時間性能
由于視頻序列的運動性,所以視頻水印技術的另一個重要評價指標是其算法的復雜度,也就是視頻水印算法運行所需要的時間.Foreman視頻序列各幀的算法運行時間與文獻[9]中的各幀運行時間對比,如圖7所示 .由圖7可知:算法的平均運行時間為0.243 7s,與文獻[9]中的平均運行時間0.24s基本相同,優于文獻[10]中的算法,證明文中的視頻水印算法具有良好的實時性.

圖6 嵌入水印后的RSN變化情況Fig.6 RSNof the watermarking after embedded
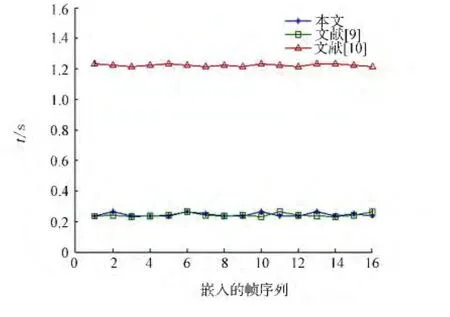
圖7 Foreman視頻序列運行時間 Fig.7 Running time of the algorithm
3.3 嵌入水印后視頻的比特率變化
嵌入水印后,載體視頻幀的比特率變化如表1所示 .表1中:Rbit為視頻的比特率;ηbit為比特率的相對變化率.
3.4 魯棒性分析
對原始視頻序列foreman進行增加噪聲、幀刪除等攻擊,計算得出提取水印的誤碼率(Ec),結果如表2所示.
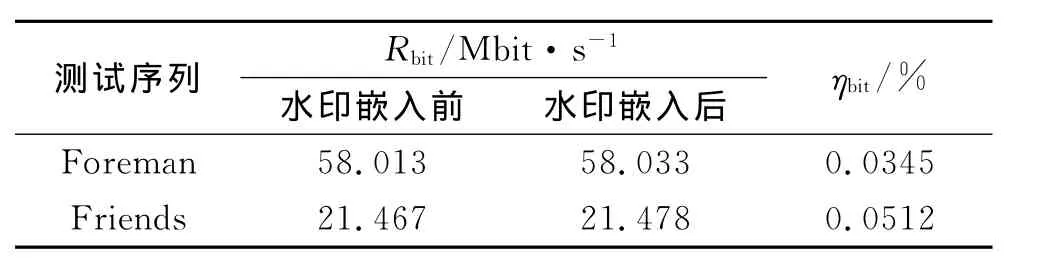
表1 視頻序列碼率變化Tab.1 Code rate of video after embed

表2 攻擊后提取出水印信號誤碼率Tab.2 Error code rate of the watermarking after attack
4 結束語
采用光流場技術對視頻幀進行運動估計,將水印圖像分塊嵌入于載體中,這種分塊區域的嵌入方法有助于降低嵌入水印后的載體失真.實驗表明:算法無論是在載體的保真性還是抵抗惡意攻擊的魯棒性上,均取得了很好的效果.
[1] 曾驍,陳真勇,陳明,等.基于幀間預測誤差擴展的可逆視頻水印[J].計算機輔助設計與圖形學學報,2010,22(5):871-878.
[2] 傅德勝,王建榮.基于 H.264的視頻水印技術[J].計算機應用,2009,29(4):1174-1176.
[3] BISWAS S,DAS S R,PETRIU E M.An adaptive compressed MPEG-2video watermarking scheme[J].IEEE Transactions on Instrumentation and Measurement,2005,54(5):1853-1861.
[4] SELESNICK I W,BARANIUK R G,KINGSBURY N G.The dual-tree complex wavelet transform[J].IEEE Signal Processing,2005,22(6):123-151.
[5] KINGSBURY N.Complex wavelets for shift invariant analysis and filtering of signals[J].Applied and Computational Harmonic Analysis,2001,10(3):234-253.
[6] DEQING S,ROTH S,BLACK M J.Secrets of optical flow estimation and their principles[C]∥IEEE Conference on Computer Vision and Pattern Recognition.San Francisco:Computer Vision and Pattern Recognition,2010:2432-2439.
[7] 謝梅芬.Horn-Schunck光流算法在運動目標檢測及跟蹤中的運用研究[J].長江大學學報:自然科學版,2012,11(9):146-147.
[8] 李玉峰.基于動態幀的視頻關鍵幀提取算法研究[J].天津科技大學學報,2009,24(4):69-72.
[9] 曾驍,陳真勇,陳明,等.基于幀間預測誤差擴展的可逆視頻水印[J].計算機輔助設計與圖形學報,2010,22(5):871-878.
[10] LIN C C,HSUEH N L.A lossless data hiding scheme based on three-pixel block differences[J].Pattern Recognition,2008,41(4):1415-1425.