艦載毫米波有源干擾發射體制選擇及工作方式
2014-10-13 08:01:38夏軍成
艦船電子對抗 2014年3期
夏軍成
(船舶重工集團公司723所,揚州225001)
0 引 言
毫米波波長介于微波與紅外之間,毫米波設備同微波設備相比,具有頻帶寬、天線旁瓣低、波束窄、抗干擾能力強、體積小、分辨力高、可進行目標識別與成像等優點。同激光與紅外設備相比,毫米波設備具有以下優點:在其傳輸窗口頻率范圍內的大氣衰減較低,穿透云層、霧、塵埃和戰場煙霧能力較強,能在惡劣的氣象和戰場環境中工作等[1]。
近年來,毫米波制導技術越來越廣泛地應用于各種軍事領域,毫米波制導系統已成為精確制導的主要發展方向之一,特別是尋的制導系統。國外許多導彈的末制導采用了毫米波制導系統。例如,休斯公司研制的“黃蜂”反坦克導彈工作在94GHz,“幼畜”和海法爾以及“SADARM”等導彈和火箭彈上都使用35GHz的導引頭[2]。目前正在發展的毫米波成像技術及毫米波脈沖多普勒導引頭和紅外焦平面探測器合成的雙模導引頭,使導引頭具有真正全天候條件下“打了不用管”的功能。用于21世紀的超音速巡航導彈(ATACCM)、超音速反艦導彈(ANS)、先進反輻射導彈(ARRM)、先進反艦導彈(AASM)等都采用了毫米波技術在內的復合制導。國內的反艦導彈也裝備了8mm(35GHz)末制導頭。
資料顯示,臺灣的雄風3型反艦導彈采用了毫米波復合制導。裝備II代毫米波導引頭的AGM-114M“地獄火”II可以遂行反艦任務。
有報道的部分國外可裝載毫米波導引頭反艦導彈的主要情況見表1[3-4]。
第4代反艦導彈在幾次局部戰爭中顯示了巨大的作用,目前國外正依據新的作戰需求,利用高新技術研制用途更加廣泛的新型艦載導彈或改進現役導彈的性能,以適應高技術局部戰爭的需要。

表1 部分國外可能裝載毫米波導引頭的反艦導彈列表
導彈采用模塊式設計,可根據戰術需要和氣象條件選用不同制導方式,配備不同導引頭有選擇地與各種目標交戰,采用多模制導的反艦導彈正逐漸成為研究的主流。
從海軍歷年的演習看,采用單一手段的電子對抗效果并不理想。在毫米波無源對抗手段的基礎上增加毫米波有源對抗手段,可對毫米波頻段末端防御的電子對抗手段進行補充、完善、豐富,進一步提高我艦艇對毫米波制導反艦彈的末端對抗能力。
1 干擾發射體制選擇
從國內外類似裝備情況來看,目前毫米波干擾發射常用的體制有:單波束旋轉體制、透鏡多波束體制、相控陣體制等[5]。
1.1 單波束旋轉體制
單波束旋轉體制是指天線形成一固定指向的窄波束,波束的指向變化是通過改變天線的物理指向來實現的。艦載條件下通常采用單個天線在180°范圍內由伺服機械機構帶動進行旋轉,從而對準目標進行干擾信號輻射。
特點:結構簡單,技術難度較小,成本低;干擾有效輻射功率低,不具有未來所需的多目標同時干擾的擴展能力;任務可靠性低,任一故障會導致不能干擾發射。
1.2 透鏡多波束體制
采用一維線性天線陣形式,在90°范圍內通過透鏡進行波束快速切換,采用4個90°一維多波束陣面瞬時覆蓋360°方位,每個90°陣面采用多陣元輸出、空間功率合成的方式,可以獲得較高的干擾功率。
特點:天線陣列尺寸小,瞬時覆蓋空域寬,波束切換速度快,可獲得較高的有效輻射功率;干擾俯仰覆蓋范圍窄,尤其是較高仰角目標的雷達目標無法干擾;有效輻射功率無法掩護大中型水面艦艇,任務可靠性一般[5]。
1.3 相控陣體制
采用寬帶毫米波相控陣,在90°范圍內通過相控陣進行波束快速切換,采用4個90°陣面瞬時覆蓋360°方位,每個90°陣面采用多陣元輸出、空間功率合成的方式,可以獲得較高的干擾功率。
特點:具有多波束透鏡的特點,通道增益波動小,波束控制靈活,任務可靠性高;但其成本高,技術實現難度最大。
以上3種干擾體制的對比情況匯總見表2。
毫米波有源干擾可綜合考慮研制成本、技術成熟度、研制進度等多方面的因素進行干擾體制的選擇。
2 毫米波有源干擾工作方式分析
毫米波有源干擾具有多種工作方式:引導工作方式、自主搜索引導工作方式、自檢工作方式和模擬訓練工作方式。其中引導工作模式又分為部分引導工作方式和完全引導工作方式。以相控陣體制有源干擾設備為例重點闡述部分引導工作方式、完全引導工作方式以及自主搜索引導工作方式。
2.1 部分引導工作方式
部分引導工作方式,是毫米波有源干擾最常用的一種工作方式。同時也是適應當前水面艦艇一般毫米波偵察設備只有方位測向現狀的一種工作方式。
在部分引導工作方式下,毫米波有源干擾接收顯控設備引導的目標信息,一般包括目標的方位、頻率(中心頻率)和干擾樣式等信息,同時接收毫米波偵察設備引導的脈沖描述字(PDW)碼,主要包括頻率碼、方位碼和脈寬碼等。毫米波有源干擾首先對目標進行方位和頻率跟蹤,產生跟蹤波門。
跟蹤成功后,在跟蹤波門內,波束控制模塊控制陣面分為3個子陣,在俯仰方向形成3個子陣,在方位向根據引導的目標方位形成指向目標方位的波束,同時對3個子陣接收的射頻信號進行開關濾波器組濾波;濾波后的射頻信號分為2路,一路送大動態檢波對數視頻放大器(DLVA)組件變為視頻后,送方向解算電路;另一路送功率合成網絡合為一路經過一級下變頻到8~16GHz后再功分為2路。一路進行二次下變頻,變頻數字儲頻使用;另一路送瞬時測頻,以便進行毫米波有源干擾設備頻率碼的精確快速引導。
毫米波有源干擾測量出目標的俯仰碼后,對目標進行頻率、方位和俯仰的精跟蹤,并輸出干擾波門。數字化干擾源在干擾波門內產生中頻激勵,經過2次上變頻后,變為所需的干擾激勵信號。干擾激勵信號經過功率分配網絡后,饋送到每個T/R組件中,再通過天線陣將功率輻射出去并在空間進行合成。此工作方式的執行流程如圖1所示。
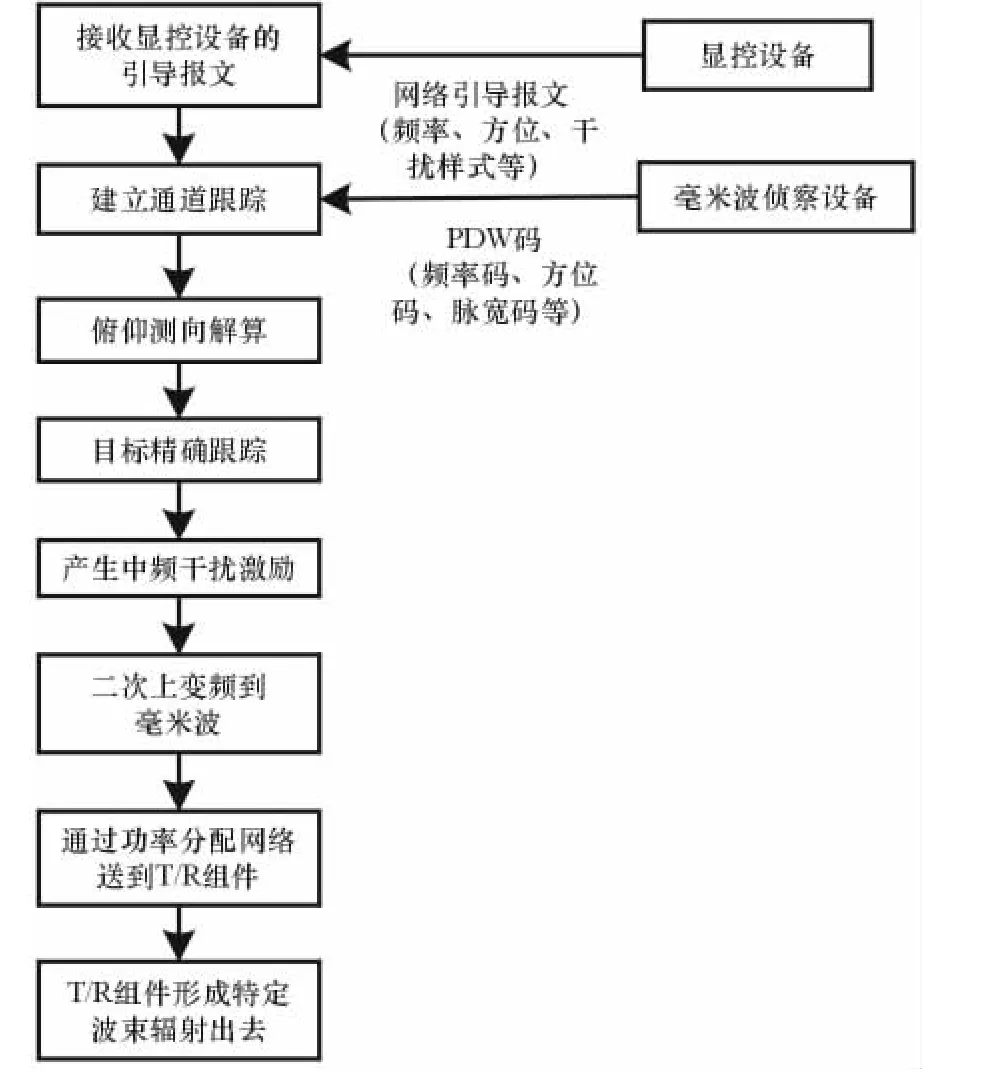
圖1 毫米波有源干擾部分引導工作流程圖
2.2 完全引導工作方式
當艦上顯控設備綜合艦上其他傳感器的信息,能夠獲得目標的方位和俯仰信息時,毫米波有源干擾可工作于完全引導工作方式。
在完全引導工作方式下,毫米波有源干擾接收顯控設備引導的目標信息一般包括目標的方位、俯仰、頻率(中心頻率)和干擾樣式等,同時接收毫米波偵察設備引導的PDW碼(主要包括頻率碼、方位碼、俯仰碼和脈寬碼等)。毫米波有源干擾對目標進行方位、俯仰和頻率的精確跟蹤,產生跟蹤波門。
跟蹤成功后,在跟蹤波門內,功率合成網絡合為1路,經過一級下變頻再功分為2路:一路進行二次下變頻,變頻數字儲頻使用;另一路送瞬時測頻,以便進行毫米波有源干擾頻率碼的精確快速引導。毫米波有源干擾精確跟蹤成功后,輸出干擾波門。數字化干擾源在干擾波門內產生中頻激勵,經過二次上變頻后,變為所需的干擾激勵信號。
干擾激勵信號經過功率分配網絡后,饋送到每個T/R組件中,再通過天線陣將功率輻射出去,并在空間進行合成。此工作方式的執行流程如圖2所示。
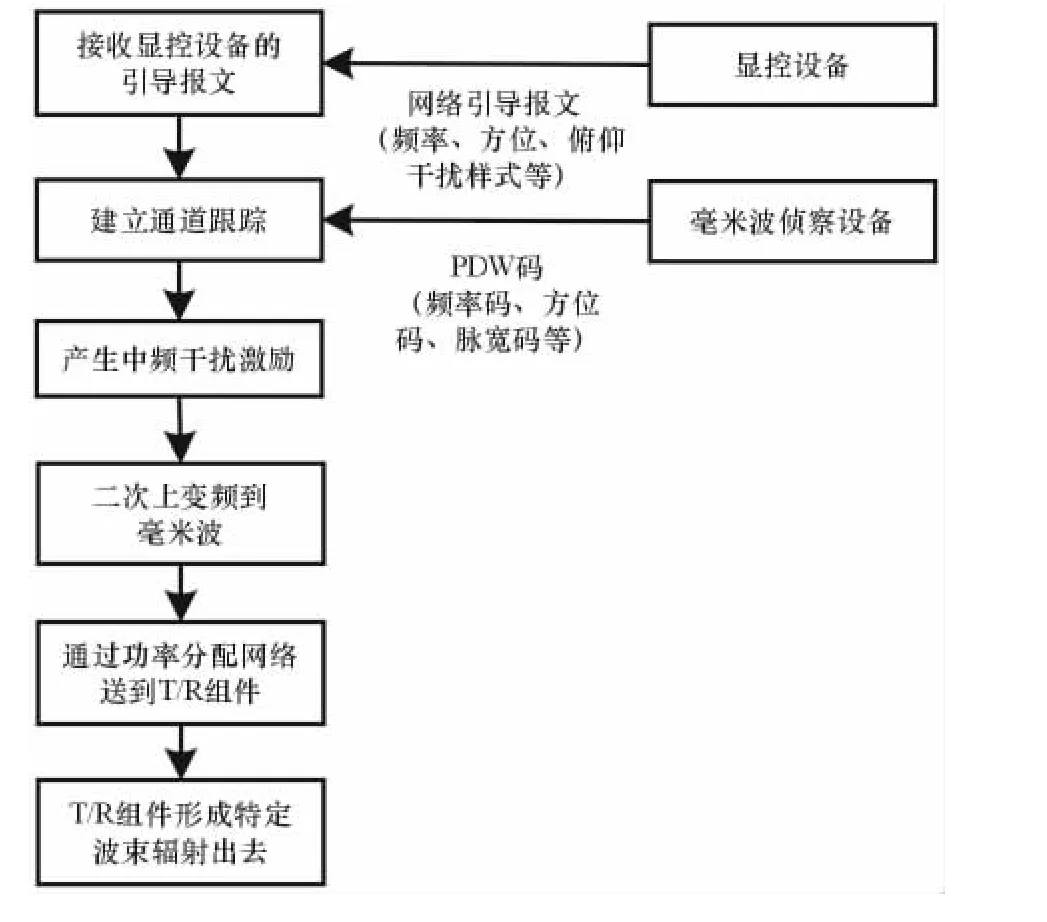
圖2 毫米波有源干擾完全引導工作流程圖
2.3 自主搜索引導工作方式
自主搜索引導工作方式是一種完全自主的工作方式。毫米波有源干擾只需要顯控設備提供大致空域的干擾告警裝訂信息,就可以實現自主搜索引導工作方式。
自主搜索引導工作方式工作時,毫米波有源干擾接收顯控引導的威脅裝訂信息(比如空域范圍等),就開始進行特定空域內的目標搜索。由于毫米波有源干擾分陣后,俯仰方向和頻率范圍是瞬時覆蓋的,因此只需要在方位向進行搜索。方位搜索時采用順序波束法進行測向,方位波束進行3dB交疊移動,在移動中通過波束賦形保持波束的方位寬度和俯仰寬度保持一致,如圖3所示。
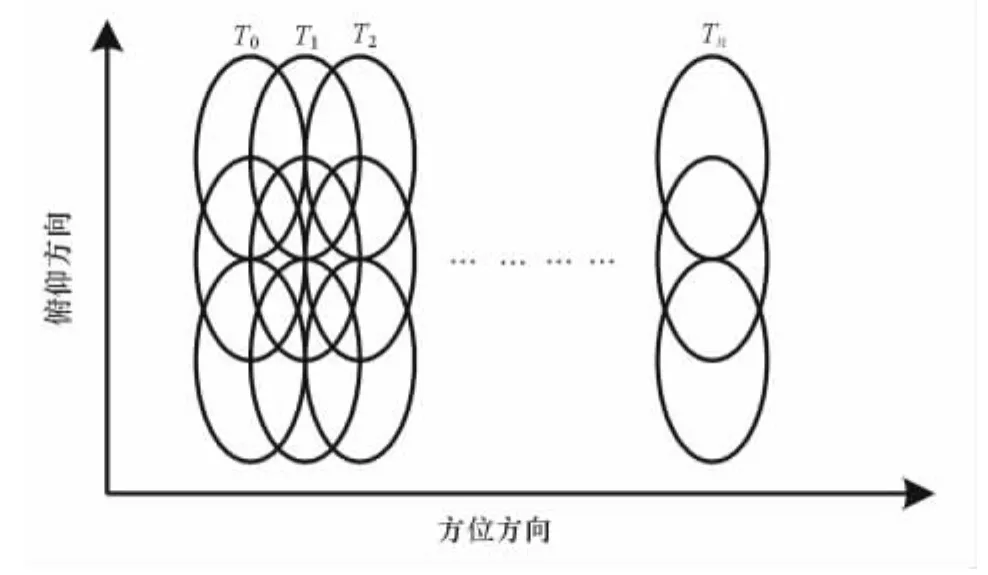
圖3 自主搜索引導時波束排布圖
毫米波有源干擾在指定空域搜索到目標后,立即將目標信息上報給顯控設備,并立即轉入跟蹤狀態。跟蹤狀態中,根據不同的干擾樣式決定是否預留大時間觀察窗口和小時間觀察窗口對目標進行持續跟蹤和跟蹤信息更新。
跟蹤成功后,在跟蹤波門內,功率合成網絡合為1路,經過一級下變頻后再功分為2路:一路進行二次下變頻,變頻數字儲頻使用;另一路送瞬時測頻,以便進行毫米波有源干擾頻率碼的精確快速引導。毫米波有源干擾精確跟蹤成功后,輸出干擾波門,數字化干擾源在干擾波門內產生中頻激勵,經過二次上變頻后,變為所需的干擾激勵信號。
干擾激勵信號經過功率分配網絡后,饋送到每個T/R組件中,再通過天線陣將功率輻射出去并在空間進行合成。此工作方式的執行流程如圖4所示。
3 結束語
艦載毫米波有源干擾作為艦船綜合電子對抗系統的一個重要組成部分,是對毫米波末制導雷達反艦導彈的有效對抗手段,可對裝載毫米波導引頭的反艦導彈實施有源壓制干擾、欺騙干擾和組合干擾,破壞其對我方艦艇的搜索、跟蹤。目前英、美等國已經開始研制和裝備艦載毫米波有源干擾裝備。為提高我海軍艦船的自衛能力,需要重點發展該類裝備。
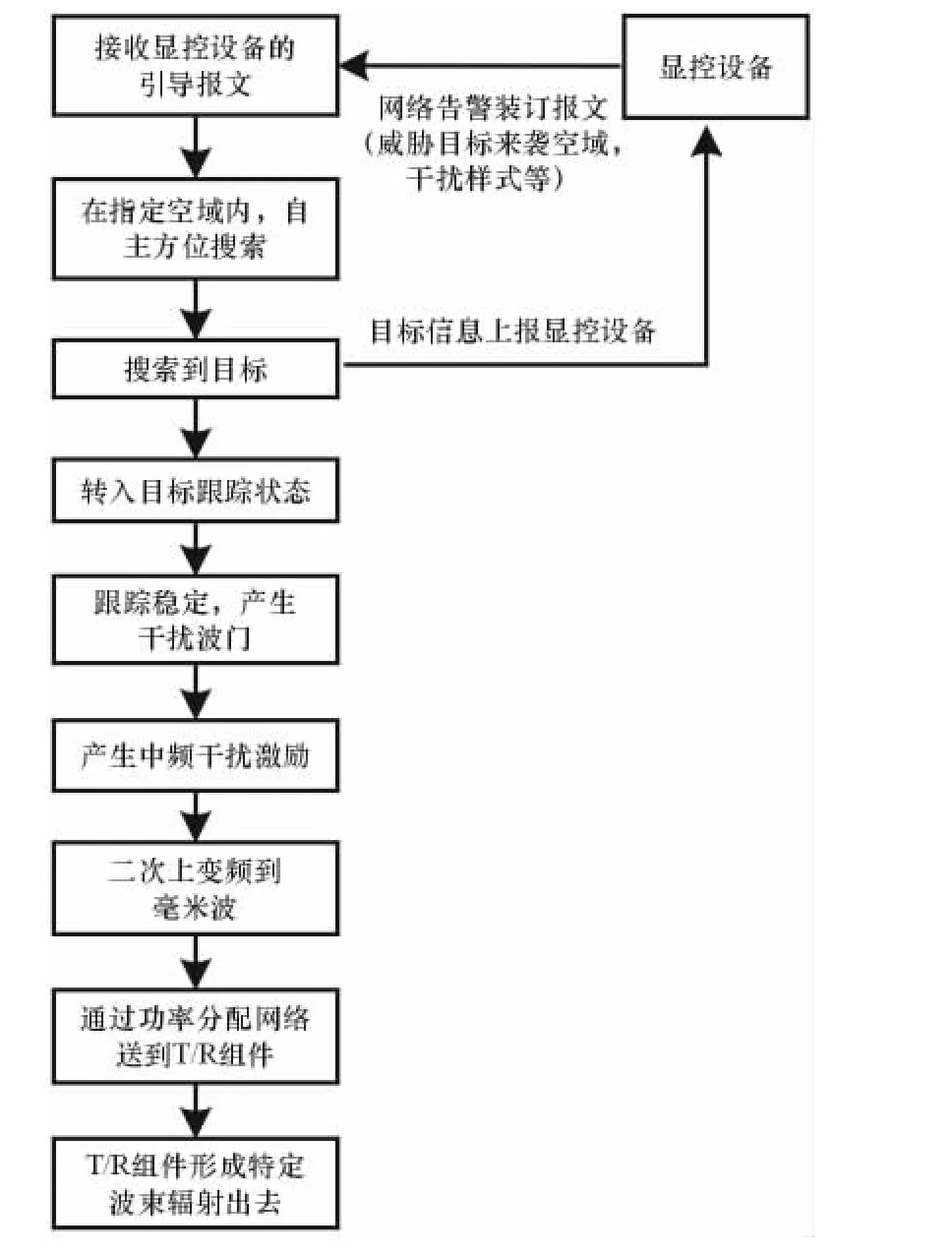
圖4 毫米波有源干擾自主搜索引導工作流程圖
本文對各種體制的艦載毫米波有源干擾體制進行了對比分析,并重點提出了相控陣體制的艦載毫米波有源干擾的工作引導方式,希望能夠對該類裝備的研制發展起到拋磚引玉的作用。
[1]竇文斌.毫米波準光理論與技術[M].北京:高等教育出版社,2006.
[2]孫瑞峰,張曉今.毫米波雷達導引頭性能分析與研究[J].現代防御技術,2011,39(2):60-63.
[3]孫衛東,劉鼎臣.毫米波雷達制導反艦導彈作戰性能研究[J].戰術導彈技術,2004(5):29-32.
[4]韓裕生,姚翎.毫米波制導武器干擾技術研究[J].紅外與激光工程,2007(S0):444-448.
[5]張光義.相控陣雷達技術[M].北京:電子工業出版社,2006.