車載多波束發射機自動測試系統的設計與開發
2014-10-13 08:00:18張薇
艦船電子對抗 2014年3期
張 薇
(船舶重工集團公司723所,揚州225001)
0 引 言
在地空電子戰干擾設備中,多波束發射機是重要組成部分之一。發射機要能產生出滿足要求的干擾發射信號、達到有效干擾的目的,各項性能指標都要滿足系統規定的要求。
多波束發射機是通過空間功率合成技術在規定的方向上產生高功率微波輻射,主要的技術參數體現在大功率方向圖和有效輻射功率上。由于受場地距離尺寸的限制,這2項技術參數的測試往往無法在微波暗室完成,而是要在室外空曠的場地進行,現有的測試手段還無法完成這一測試任務。本文中設計的車載多波束發射機測試系統能對多波束發射機的大功率方向圖、有效輻射功率等技術參數進行快速、準確的測試。目前該測試系統已應用到車載多波束發射機測試中,取得了預期的效果。
1 測試系統的設計原理
本系統采用全自動計算機管理,對被測多波束發射機的輸入輸出信號以及發射機方位信息進行全程管理和跟蹤,將輸入輸出數據采集、處理,繪制成直觀的多波束方向圖,從而達到能自動測試多波束發射機大功率方向圖和有效輻射功率的目的。
1.1 測試系統的硬件組成
為了實現對多波束發射機大功率方向圖的測試,測試系統由以下硬件組成:計算機、信號源、伺服系統、打印機、接收天線、功率計。測試系統組成框圖見圖1。
其中作為服務器的主控計算機、信號源、打印機布置在車載作戰艙室中,被測多波束發射機安置在艙室外伺服系統控制的轉臺上,此為發射端硬件配置。接收端配置了天線、功率計和作為客戶端的計算機,負責接收傳送發射端輻射的大功率信號。計 算機之間通過網線連接。
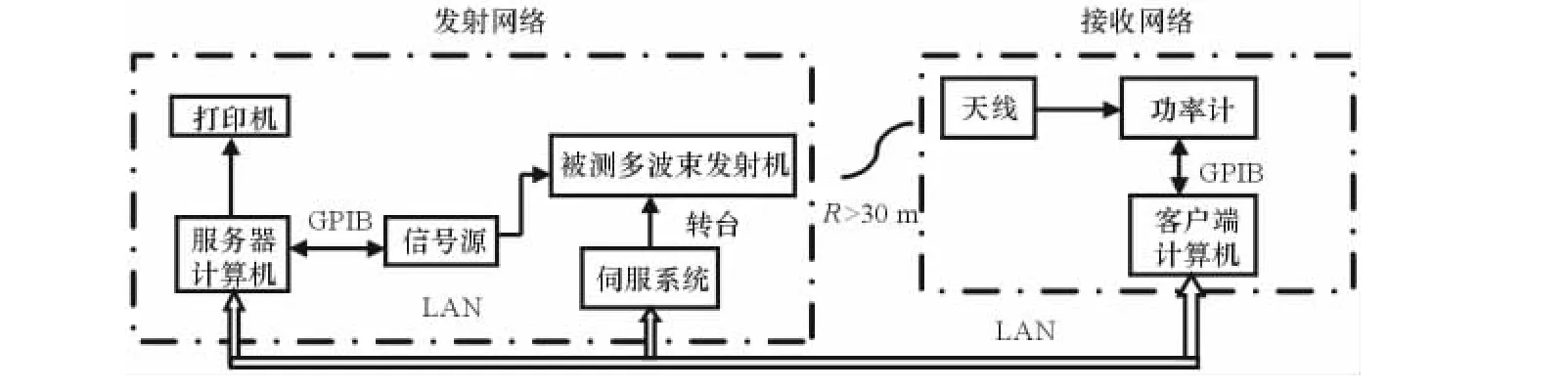
圖1 測試系統原理框圖
1.2 測試系統方案設計
在本測試系統中,計算機通過GPIB接口完成對信號源和功率計的輸入輸出控制,測試系統內2臺計算機以及伺服系統之間的通信則通過組建局域網完成。
1.2.1 發射網絡組建
發射網絡主要完成對被測多波束發射機射頻信號的管理,控制伺服系統轉動轉臺,掃描輻射一定角度范圍內的功率信號,收集接收網絡傳輸過來的數據信息,依據輸入輸出數據以及角度信息之間的對應關系繪制大功率方向圖。
發射網絡的控制中心為擔任服務器角色的主控計算機。它與發射網絡內的其他組件控制關系如圖2所示。
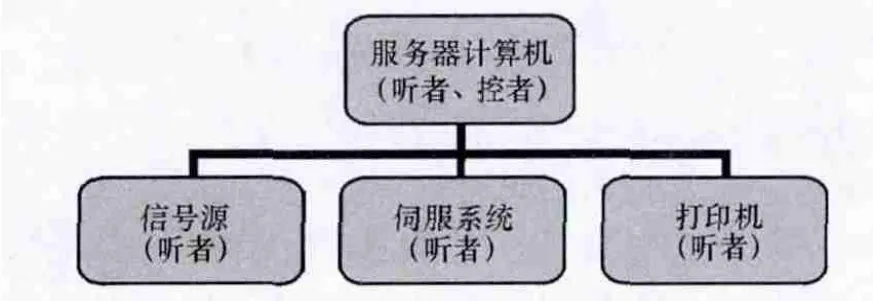
圖2 發射網絡
服務器計算機作為網絡組建中的控者和聽者,通過GPIB接口與信號源進行通訊。GPIB系統作為目前使用的標準化接口母線系統,可以使世界上不同廠家生產的儀器設備用統一的標準母線聯接起來,消除了以往每次組建自動測試系統時都要設計一套專用接口的重復勞動。在本方案中,計算機控制信號源的頻率范圍、功率大小和頻率步徑,控制信號源開放與關閉信號的時間,從而達到能精確測量數據的目的。
其通過局域網與伺服系統進行通訊。由于局域網具有結構簡單、數據傳輸率高、傳輸質量優良、兼容性和互操性良好等特點,筆者選擇了組建局域網進行控制命令的下發執行,以及測試數據之間的傳輸和交換。計算機將被測多波束發射機當前的方位信息下發給伺服系統,伺服系統轉動轉臺,帶動被測多波束發射機變換水平方位角度,對當前角度的輸出信號進行掃頻測試。
打印機通過計算機通用接口并口傳輸方式將最終需要輸出的數據進行打印,便于保存與查閱。
1.2.2 接收網絡的組建
接收網絡完成被測多波束發射機發射信號的接收工作,根據服務器計算機的要求,客戶端計算機負責記錄和傳輸接收功率信息,對當前的接收數據進行判別,以便能進行更精準的測量。接收網絡組件關系如圖3所示。
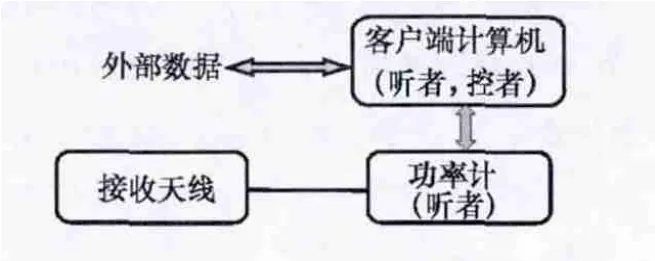
圖3 接收網絡
接收天線接收來自被測多波束發射機的射頻信號,通過射頻電纜傳輸到功率計中,當客戶端計算機通過局域網接收到來自服務器的控制指令后,對功率計的當前數據進行多次錄取,使用統計學方法剔除異常數據,將處理后的數據傳送給服務器。
用統計學的方法處理可疑數據的基本思想是:給定一個置信概率,找出相應的置信區間,凡在這個置信區間以外的數據,就定為異常數據并予以剔除。在實際測量中常用算術平均值代替真值,用標準偏差估計值σ(x)代替標準偏差,凡測量值xi在區間[x-cσ(x),x+cσ(x)]以外的,即|xi-x|>cσ(x)時,就將數據xi剔除不用[1]。
1.3 工作流程
當被測多波束發射機完成順序加電后,伺服系統調整發射機的發射方位,打開信號源的射頻信號,將初始設定好頻率、功率的射頻信號通過射頻電纜輸出給被測發射機,發射機將該射頻信號放大后,在距離發射機約幾十米處的接收喇叭天線將輻射信號接收并通過射頻電纜輸入到功率計中。當處于客戶端的計算機接收到來自服務器的“讀功率”指令后,將當前的功率信息錄入處理并傳送到服務器端,繼續等待下一指令的到來。服務器負責數據的整理、記錄、圖形繪制,具體工作流程如圖4所示。
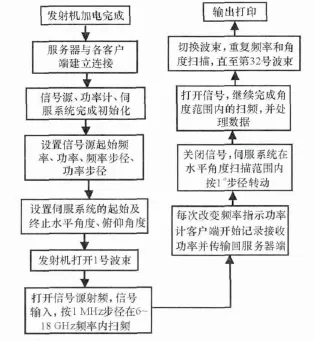
圖4 工作流程
2 系統軟件詳細設計
多波束發射機測試系統軟件是在Visual Basic(VB)6.0環境下開發的。VB提供了良好的人機對話界面,方便用戶利用控件和模塊加載功能進行程序的開發[2]。
為了實現在VB環境中對儀表的控制,必須利用VB中的模塊加載功能,將專用控制儀表的通用類模塊加載到工程設計中來。此模塊包含了所有功能函數的聲明,在對儀表的控制中直接調用某些函數進行編程,達到對儀表程控的目的。
在VB環境下,為了方便局域網的建立,VB提供了一個Winsock控件。它提供了訪問傳輸控制協議(TCP)和用戶數據報協議(UDP)網絡服務的方便途徑。為編寫客戶或服務器應用程序,不必了解TCP的細節或調用低級的Winsock APIs,通過創建服務器和客戶端就可完成局域網內的數據交換。
軟件分為兩大部分:一是發射端控制軟件;二是接收端控制軟件。發射端軟件完成服務器對伺服系統、信號源的控制及數據信息的處理和輸出。接收端軟件完成對服務器下發指令的接收和執行。
2.1 服務器控制軟件設計
服務器控制軟件分為三大功能:控制儀表,數據處理及顯示,控制客戶端的指令接收和反饋。發射機工作正常后,將發射機切換到1號波束,按照測試要求將信號源初始化,與作為客戶端的伺服系統和控制功率計的計算機確立連接后,方可開始進行測試。測試過程中收集到的頻率、功率等數據以圖表的形式顯示在計算機中,根據客戶的要求不同顯示不同的數據圖表。圖5為軟件工作流程框圖。
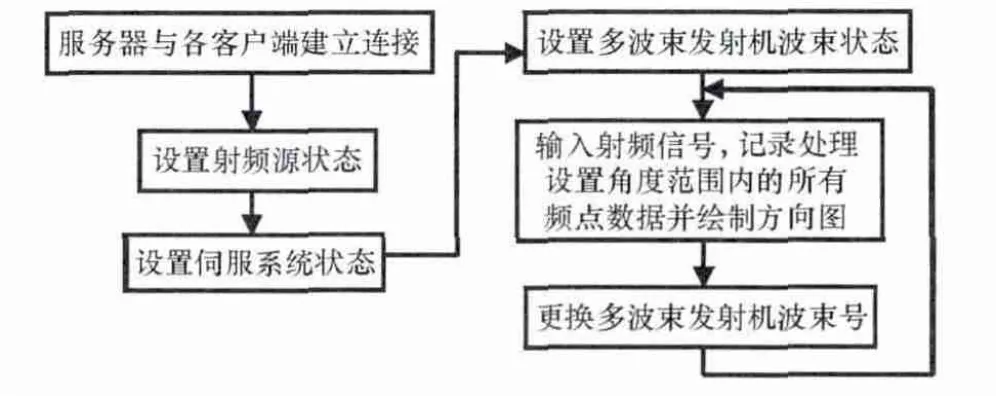
圖5 服務器控制流程
2.2 接收端軟件設計
接收端軟件完成兩大功能:接收服務器指令錄入及處理數據,反饋數據信息。軟件流程見圖6。
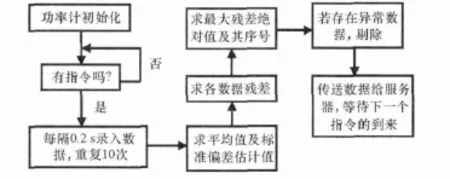
圖6 接收端軟件流程
2.3 測試軟件界面
本軟件需要用戶對頻率范圍、頻率步徑、輸入功率、角度范圍、角度步徑進行設置,根據用戶對圖形的要求修改顯示界面,如圖7所示。
3 應用軟件測試及分析
車載多波束發射機測試系統完成設計及調試后,應用于某設備多波束發射機方向圖的測試。在室外場地測試時,地面反射會影響發射機方向圖的測試,經過多次試驗,最終確定發射機與接收喇叭之間距離≥35m,接收喇叭垂直高度≥20m,發射機天線仰角設置≥20°,在這種測試條件下能消除地面反射所帶來的測量誤差。
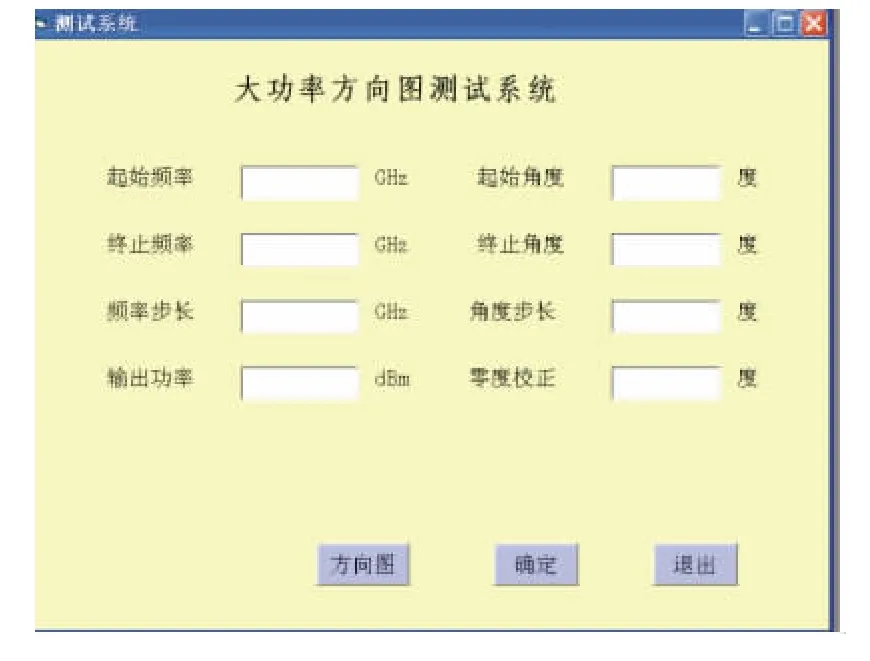
圖7 用戶圖形界面
設置初始頻率8GHz,終止頻率18GHz,每隔1GHz測試一個點,角度每隔1°為一個點。角度轉動范圍在0°~30°內。方向圖測試結果如圖8所示。
用戶也可根據對方向圖副瓣的要求來設置更寬的角度轉動范圍,角度間隔精度可達到0.1°。
4 結束語
隨著車載多波束發射機設備量的增多,調試測試工作也隨之繁雜起來。多臺套設備需要在較短時間內完成各項工作,對調試人員提出了很高的要求。傳統手工控制耗時、耗力且效率低下,測試數據也不能立刻直觀地繪制出來并存儲。車載多波束發射機測試系統的研制成功,使得一名調試人員即可完成上述測試工作。
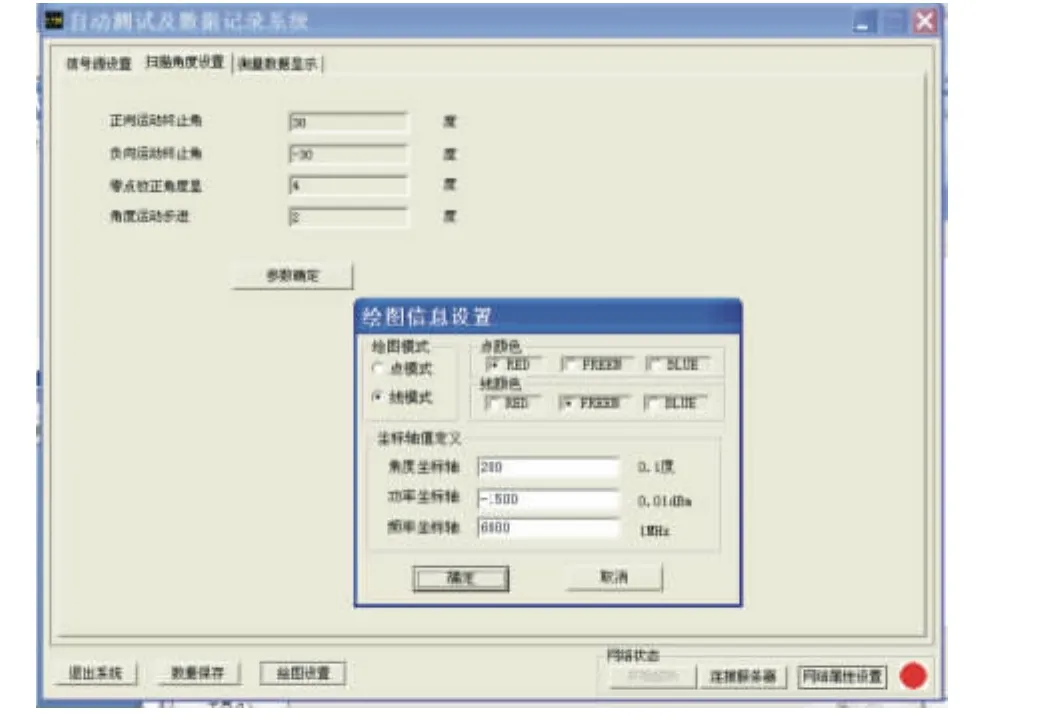
圖8 測試結果
[1]王成安,李福軍.電子測量技術與實訓簡明教程[M].北京:科學出版社,2007.
[2]李雁翎,王建忠,孔銳睿.Visual Basic程序設計教程[M].北京:人民郵電出版社,2012.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
科技傳播(2019年22期)2020-01-14 03:06:34
電子制作(2018年9期)2018-08-04 03:31:04
電子制作(2018年12期)2018-08-01 00:48:02
消費導刊(2017年20期)2018-01-03 06:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
西部廣播電視(2015年9期)2016-01-18 03:46:07