低空目標長時間積累檢測技術研究
2014-10-13 07:59:56王健,王寶,萬華
艦船電子對抗 2014年3期
關鍵詞:信號
王 健,王 寶,萬 華
(中國電子科技集團公司38所,合肥230088)
0 引 言
低空突防是現代雷達面臨的四大威脅之一,隱身技術的發展使得這種威脅更為嚴重[1]。隱身技術使目標雷達截面(RCS)大大降低,意味著雷達面臨著低空小目標檢測的挑戰。在低空弱小目標檢測中,除了受多徑效應的影響外[2],目標信號通常淹沒在強雜波背景中,嚴重制約了目標的有效檢測[1-4]。
長時間積累技術是解決弱小目標信號檢測的有效途徑之一。長時間積累不僅能夠增加回波信號的能量,還可以提高濾波處理的自由度,使得更加復雜的濾波處理算法成為可能。在特定的雷達波形、目標速度和環境特性下,信號積累時間是受限的,這主要表現在2個方面:目標徑向飛行時,在積累時間內目標可能會跨過若干個距離單元距離;目標做切向飛行或機動飛行時,在積累時間內目標可能跨多個多普勒單元。跨距離單元和跨多普勒單元構成了雷達最大積累時間限制。突破積累時間限制必須解決目標跨距離單元和跨多普勒單元補償問題。在實際系統設計時,往往通過合理的資源設計使得目標不發生多普勒跨越,降低長時間積累補償的復雜度,只對目標跨距離單元進行補償。
目前,國內外學者對長時間積累技術進行了廣泛研究,然而這些研究主要集中在算法層面[5-6]。本文擬從系統工程設計的角度對基于頻率包絡移位補償算法的長時間積累技術進行研究,同時,通過與常規處理方法對比,對長時間積累技術的效能進行綜合分析。
1 工作原理
假設雷達信號波形為線性調頻信號,其發射波形可寫為[7]:

式中:Sn(t)為雷達雜波和噪聲分量。
從上式可以看出,由于目標運動不僅會產生多普勒頻移,且每個脈沖回波的延時也不相同,相鄰脈沖之間的延時固定,積累脈沖數目越多,前后脈沖之間的延時越大。
假設在離雷達R0的位置處有一徑向飛行目標,徑向飛行速度為v,則雷達發射波形經目標散射、混頻、濾波處理后的回波信號可寫為:實現對每個脈沖的延時補償,使得所有脈沖在距離維上對齊到初始延時位置,也被稱為頻域包絡移位補償方法。
實際工作過程中,由于目標速度未知,需要對所處理速度范圍設置多個速度補償通道,與目標速度最接近的補償通道將獲得最大信噪比。通過各補償通道選大處理,實現對未知速度目標的跨距離補償。
2 積累損耗分析
理論上,只要目標運動,不論其在積累時間內走動是否大于一個距離單元,都存在跨距離單元損耗。假設目標運動速度為v,積累脈沖數為N,脈沖重復周期為Tr,目標起始位置任意,如圖1所示。在圖1(a)中,目標1、目標2、目標3速度和積累時間相同,但起始位置不同。目標1完成落第i-1距離單元中,不存在跨距離單元損耗;目標2大部分回波脈沖位于第i距離單元,只有少部分回波脈沖位于第i-1距離單元,積累后信號能量一部分被分散到第i-1距離單元,積累損耗逐步顯現;目標3的所有回波脈沖剛好均等跨騎在第i距離單元和第i-1距離單元之間,此時信號能量被平均分散到2個距離單元,積累損耗最大。
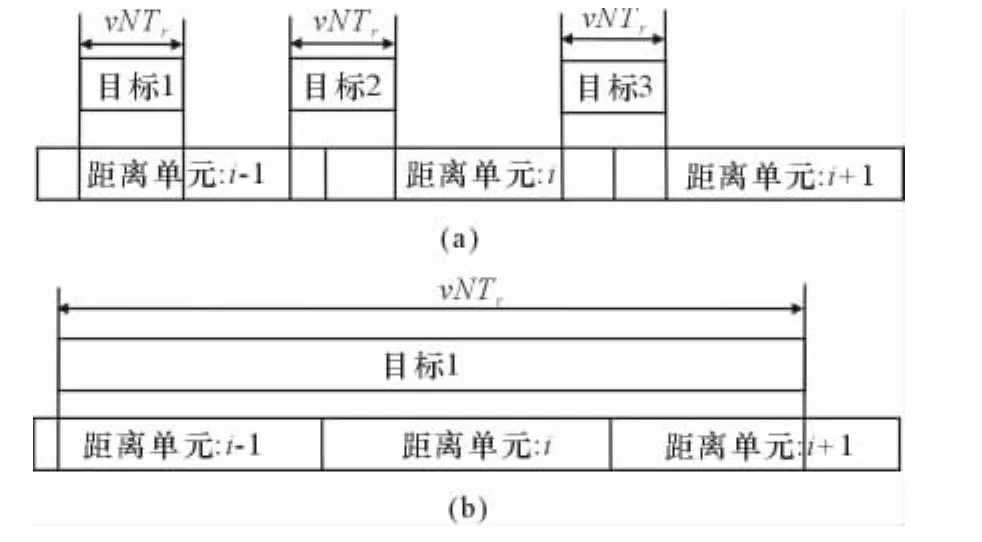
圖1 運動目標跨距離單元示意圖
從上面分析可知,目標跨距離單元損耗與起始位置呈現出周期性變化的特點,當目標回波跨騎在2個距離單元之間時,積累損耗最大。根據以上分析可對目標跨距離最大積累損失計算如下:

式中:P0為靜止目標信號的積累功率,表示取運動目標信號跨越的若干距離單元中能量最大者。
需要指出的是:當目標跨越多個距離單元時,目標脈沖回波總會占滿一個距離單元,如圖1(b)所示,其積累損耗可由下式估計:

式中:ΔR為一個距離單元長度;σSNR0為單個脈沖的信噪比;Lc為濾波加權等各種信號處理損耗;int( )為取整函數。
對長時間積累損耗進行仿真分析,雷達工作參數如下:工作頻率1.3GHz,重復周期500μs,脈沖寬度75μs,瞬時帶寬5MHz,采樣率10MHz,目標速度800m/s,目標位置25km,積累脈沖數512個。
圖2給出了多普勒處理后回波信號功率和積累損耗隨積累時間(相參積累脈沖數)變化的情況。為了便于比較,首先對靜止目標進行仿真分析,靜止目標不發生跨越現象,積累脈沖數每增加1倍,回波信號相參積累功率增加約6dB,同時噪聲非相參積累功率增加了約3dB,信噪比提高了約3dB。從圖2(a)中可以看出隨著積累脈沖數的增加,積累信號功率逐漸接近于飽和,這與前面的分析一致,即當目標跨越多個距離單元時,積累信號功率最大值等于單個距離單元內的所有回波相參積累結果,并不再隨積累脈沖數增加而增加,同時積累損耗卻逐漸增加。
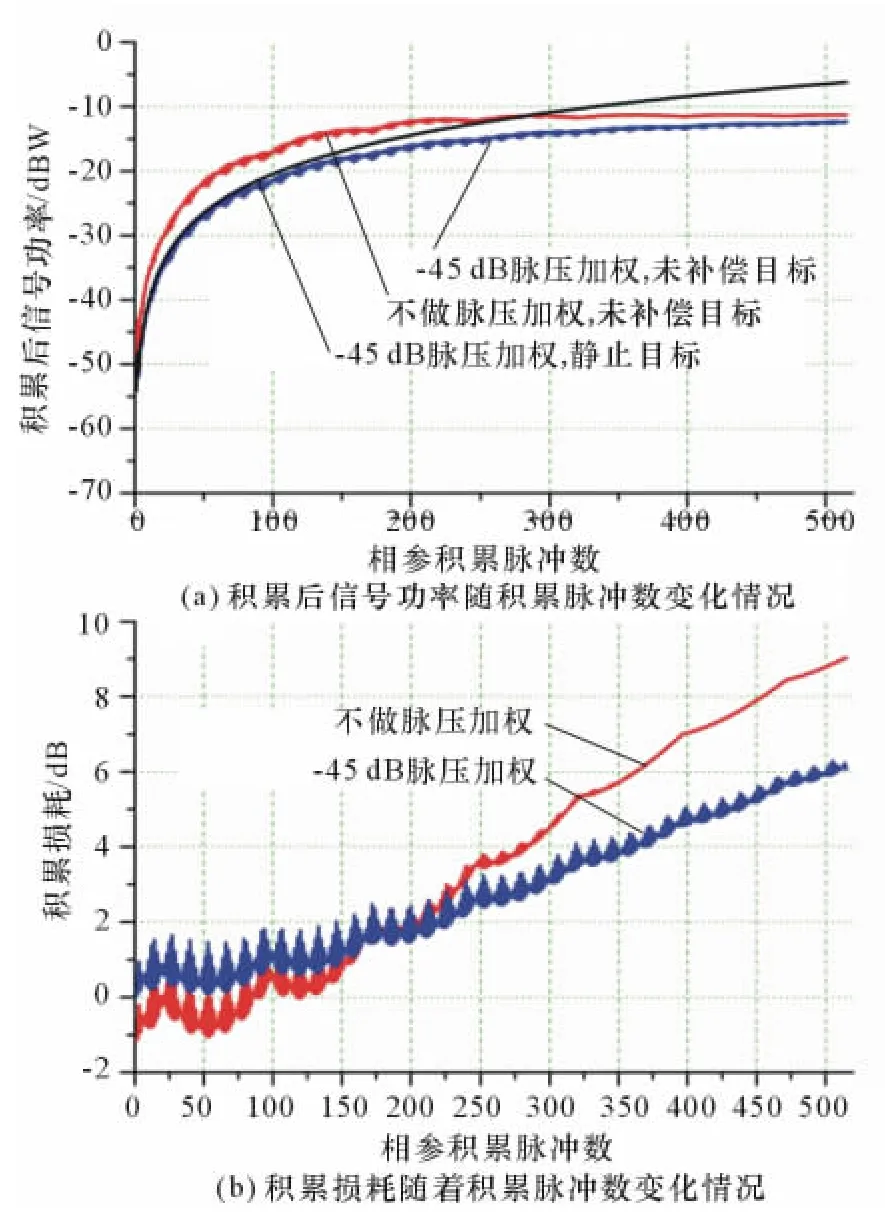
圖2 相參積累回波信號功率和積累損耗隨著積累脈沖數變化情況
當積累脈沖數比較少時,積累損耗變化并不明顯減少。這是由于在進行脈壓處理時,通常進行加權來壓低距離旁瓣,壓縮后脈寬展寬,使得目標即使發生距離單元跨越仍然可獲取一定的積累增益。從圖2中可以看出其飽和點位置向左移動,這正是脈壓加權導致脈沖展寬的結果。需要指出的是:當積累脈沖數較少時,由于跨距離單元損耗處于次要位置,脈壓加權損耗起主導作用,這時不做脈壓加權運動目標的回波信號積累,功率甚至比靜止目標更高。從積累損耗曲線上看,積累損耗有1.2dB左右的增益,這與45dB脈壓加權理論損耗1.27dB一致。本系統積累512個脈沖,跨距離損耗為6.12dB。
3 包絡補償仿真分析
在上述雷達工作參數下,對基于頻域包絡移位補償的長時間積累算法進行仿真分析,目標位于25km處,沿徑向勻速運動,目標速度800m/s。雷達系統處理的速度范圍為[-800,800]m/s,在雷達處理速度范圍內設置8個補償通道,各通道的中心補償速度分別為[-700,-500,-300,-100,100,300,500,700]m/s。
圖3給出了脈沖多普勒處理后各補償通道回波信號功率隨著積累脈沖數變化的情況。由于目標速度為800m/s,目標落在第1個補償通道(中心補償速度700m/s),補償后目標仍以100m/s的速度進行走動。從圖中可以看出第一補償通道的信號功率最高,接近于無距離單元跨越的靜止目標的信號功率;其它補償通道隨著補償速度與目標速度的差值越大,補償效果也越差。從積累時間上看,當積累脈沖數減少,目標跨越減少,相應的補償通道可相應減少。
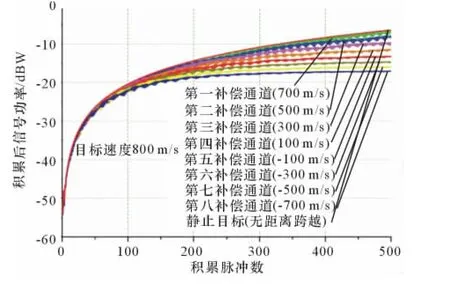
圖3 目標速度800m/s時,各補償通道積累回波信號功率隨積累脈沖數變化情況
具體針對本雷達系統,當相參積累脈沖數小于100時,可不設置速度補償通道。當相參積累脈沖數小于200時,可在[400,-400]m/s處設置2個速度補償通道補償。當相參積累脈沖數大于300時,可在[640,320,0,-320,-640]m/s處設置5個補償通道。當相參積累脈沖數大于500時,可在[700,500,300,100,-100,-300,-500,-700]m/s處設置7個補償通道。需要指出的是:隨著補償通道數量的增加,補償效果變好,但是信號處理設備量也成倍增加,導致系統成本上升,可靠性下降。本系統積累脈沖數512個,結合設備量、成本、可靠性等因素考慮后,在系統指標要求的速度處理范圍內設置5個補償通道。
圖4給出了各補償通道回波信號,第一~第五補償通道信號功率分別為-6.90dB、-9.78dB、-12.33dB、-14.69dB和-16.75dB。選大處理后目標位于第一補償通道,這與預期結果一致。與不做任何補償相比(第三通道,補償速度為0m/s),信號功率提升5.43dB,信噪比提升5.43dB。由此可見,通過通道補償大大提高了目標可檢測性。
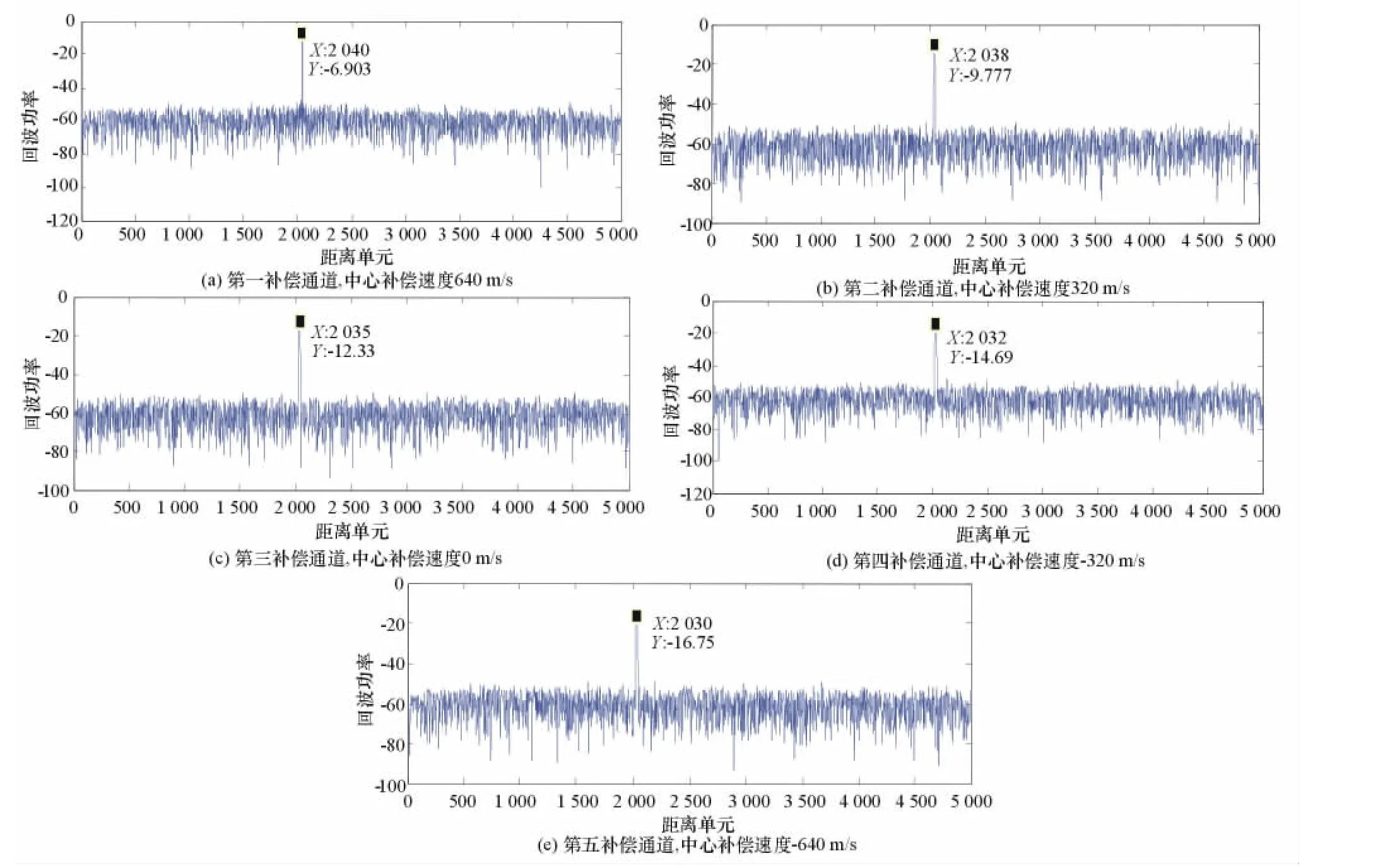
圖4 各補償通道回波信號
4 結束語
長時間積累技術是解決弱小目標信號檢測的有效途徑之一。本文對基于頻率包絡移位補償算法長時間積累技術的工作原理、積累性能以及補償通道設計等方面進行了系統研究,并結合具體雷達參數建立仿真模型,進行了仿真驗證,仿真結果表明通過頻率包絡移位補償可獲取5.43dB的信噪比增益。
[1]馬井軍,馬維軍,趙明波,等.低空/超低空突防及其雷達對抗措施[J].國防科技,2011(3):26-35.
[2]張友益.一種改善相控陣雷達低空探測性能的方法研究[J].艦船電子對抗,2008,31(4):5-9.
[3]沙祥,萬華,王寶.第四代低空監視雷達技術體制探討[J].空軍雷達學院學報,2012,26(3):170-173.
[4]楊大偉.球載雷達探測低空小目標的性能分析[J].艦船電子對抗,2012,35(2):38-43.
[5]余吉,許稼,湯俊,等.基于Keystone變換的改進雷達目標長時間積累[J].雷達科學與技術,2008,6(6):454-458.
[6]劉海波,盧俊道.基于Keystone變換的寬帶脈沖多普勒雷達目標運動補償算法[J].北京理工大學學報,2012,32(6):625-630.
[7]Richards M A.雷達信號處理基礎[M].邢孟道,王彤,李真芳譯.北京:電子工業出版社,2010.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06