預警機協同預警作戰模型研究
2014-10-13 07:59:56李廣強魯瑞達王茂華
艦船電子對抗 2014年3期
李廣強,魯瑞達,王茂華
(空軍預警學院,武漢430019)
0 引 言
預警機是防空預警作戰中的重要成員,其擔負的作戰任務及其作戰環境決定了預警機需要與其他預警探測裝備及指揮所等作戰單位進行情報協同。這些協同單位包括地面防空部隊、指揮所、其他預警機、支援飛機(包括電子戰飛機、空中加油機等)和海面艦艇等[1]。研究預警機協同預警作戰模型,需充分考慮各個協同單位之間的情報協同關系,有利于充分提高防空預警系統整體作戰效能。
本文重點針對2種協同情形的模型進行研究:一是多架預警機協同預警探測模型;二是預警機與艦載雷達協同預警探測模型。
1 空空協同預警作戰模型
在無地(海)面雷達支援的情況下,預警機遂行遠程預警探測任務時,多架預警機進行協同部署,組成空基雷達網[2]。該作戰樣式主要適用于遠離海岸線的前出作戰。多架預警機組成空基預警探測網時,各個預警機分別主要負責各自責任區的空情掌握,同時相互補盲,形成連續覆蓋空域。
多架預警機按圖1中所示方式并列部署,每架預警機在指定空域巡邏飛行(虛線為預警機出返航線路)。各預警機陣位間隔為L;R強為預警機強效區半徑;R弱為預警機弱效區半徑,則當L<2R強時,預警機可以按照任意陣位巡邏。
而當2R強≤L<(R強+R弱),如圖1中B與C,預警機在進行陣地部署時,2架預警機的強弱效區要在任意時刻相互重疊。同時,錯開轉彎時間,以避免轉彎盲區。
當L≥(R強+R弱),如圖1中A與B,在2架預警機之間存在弱效區,有一定的漏警率,給敵機實施突襲帶來可趁之機。
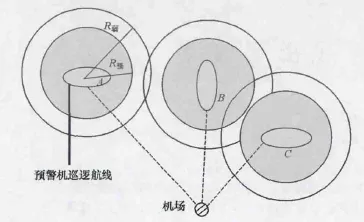
圖1 多機并列部署
綜上所述,如果預警機按式(1)所示情形部署時,雖然不會在所覆蓋區域形成盲區,但是覆蓋區域受到一定的限制;按式(3)所示情形部署時,存在一定的漏情,沒有達到空情保障要求。所以可采取式(2)所示情形進行部署。
如圖2所示,在某一空域部署3架預警機A、B、C,其巡邏邊長和轉彎半徑相同,沿航跡順時針巡邏飛行。圖中,數字表示預警機巡邏航線上的特定時刻節點,1、2表示平飛航線的中點,其余數字表示預警機轉彎節點,具體位置如圖中標注所示。假設T1時刻預警機A到達其巡邏航線1點處并向右飛行,逐漸覆蓋預警機A與預警機B之間的弱效區,預警機B到達自身巡邏航線4點處并向下飛行,逐漸覆蓋預警機B與預警機C之間的弱效區,預警機C由1點向右巡邏飛行。T2時刻,預警機A到達2點處并向左飛行,預警機B到達6點處,逐漸覆蓋預警機A與預警機B之間的弱效區,預警機C到達2點處并向左飛行,對預警機B與預警機C之間的盲區進行補盲。
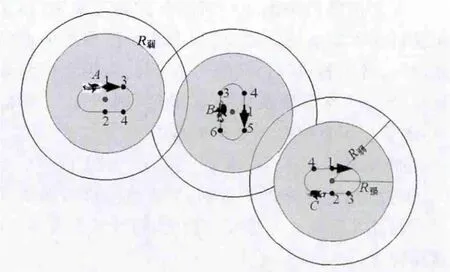
圖2 多架預警機協同預警探測
綜上所述,合理部署多架預警機的巡邏空域及預警機之間的部署陣位,有利于充分發揮空基預警探測網的整體效能。
此外,預警機還可以采用“環形”方式巡邏飛行,即多架預警機在同一航線上巡邏飛行,保持一定距離。由于轉彎時預警機基本完全丟失目標,而預警機速度慢,轉彎時間長,敵機利用我預警機轉彎時機實施突襲或進入我預警機底空盲區,對我預警機造成極大的威脅。
如圖3所示,當2號預警機轉彎時,1號預警機對其轉彎盲區進行補盲,3號預警機與1、2號預警機進行底空盲區和機身盲區互補。
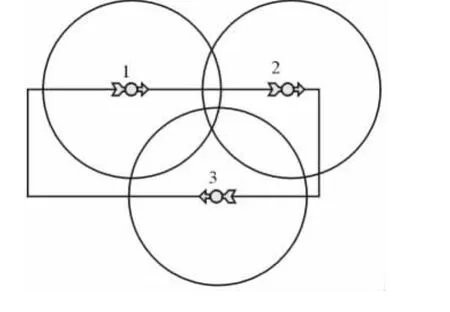
圖3 多架預警機環形巡邏部署方式
2 空海協同預警作戰模型
海面艦隊在遂行作戰任務時,由于自身速度緩慢,艦載雷達探測威力有限,往往容易受到敵方的突襲。出動預警機對海面艦隊進行空情保障,有利于提高艦隊的生存能力,同時為艦隊對敵方實施火力打擊提供空情信息。
空海協同預警作戰的主要特點有3個方面[3]:
一是海面艦隊在進行情報收集的同時,更重要的是作為作戰單元對敵方實施火力打擊。所以,空海協同預警作戰時,需以海面艦船的作戰需求為主,預警機的主要作用是為海面艦船提供空情保障。
二是相對空地協同而言,空海協同預警作戰區域距離海岸線更遠,單架預警機在巡邏空域有效巡邏時間相對縮減,需要更多的預警機輪流值班來為海面艦船提供空情保障。
三是地面火力支援力量減弱。當預警機在遂行預警探測任務時遇到安全威脅,地面火力無法對其實施有效保障。預警機由于受到威脅而放棄作戰任務進行返航的概率提高。
如圖4所示,以預警機巡邏空域的中心為圓心建立直角坐標系,Y軸的正方向為敵方可能入侵的主要方向。Y軸上方有3艘艦艇,編號分別為1、2、3。以艦艇為圓心的圓圈區域為對應艦艇艦載雷達的探測范圍。L為敵方火力打擊的最大距離。預警機巡邏區域的邊長為2a。
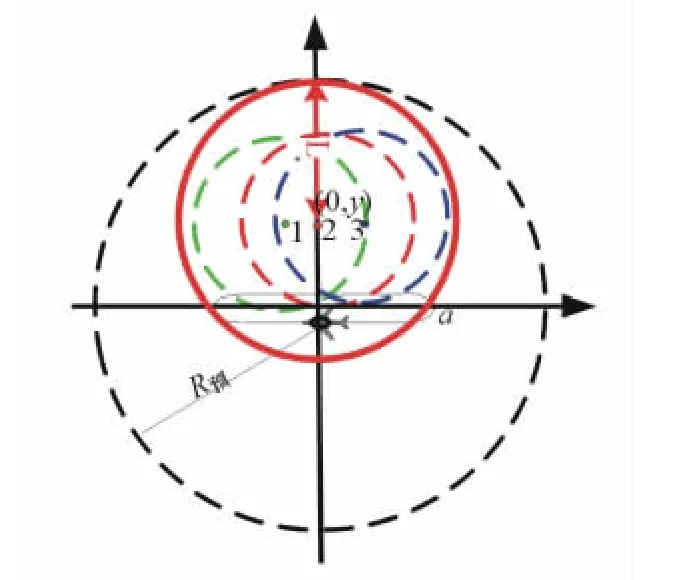
圖4 空海協同預警探測部署
設海面艦艇之間的距離為S,S?L。同時,海面艦隊在遂行作戰任務時,通常艦隊內的艦載雷達輪流開機,所以將海面艦隊作為一個點考慮,以該點為圓心,L為半徑作圓,敵方目標進入圓形區域則對我艦隊造成威脅。在發現概率Pd=0.5、虛警概率及掃描周期一定的條件下,預警機對典型目標的探測距離為R預。為了對敵來襲方向保持最大限度的預警監視,要求預警機轉彎半徑盡可能小,所以可將預警機看作沿X軸方向作往返運動。為了保障海面艦隊不受到敵方威脅,要求預警機對實線圓圈內目標實施全時段監控。由圖4可以看出,預警機在轉彎時存在與實線圓圈內任意一點距離的最大值。最大值Smax計算公式如下:

為了全時段對威脅目標進行監控,要求:Smax≤R預。
綜上所述可得,預警機巡邏邊長a與預警機距離海面艦隊的距離y之間應該滿足的條件:

3 結束語
預警機協同預警作戰時,需要充分考慮空情保障區域的大小及位置,充分發揮預警機活動性強及前出距離遠的優勢,地(海)面雷達靈活部署,從而達到優勢互補。同時,地(海)面雷達應為空中預警機提供空情保障,及時發現對預警機安全造成威脅的空中目標[4]。因此,現代戰爭中,預警探測網應該與防空火力網和電子戰部隊協同作戰,這樣有利于實現“1+1>2”的綜合效能,同時對提高預警探測網的自身安全也有重要的意義。
[1]羅繼勛,雷洪利,胡朝暉,等.預警機指揮控制飛機及編隊作戰原理[M].北京:解放軍出版社,2009.
[2]肖福來,龐雪冰.預警機抗擊戰斗機的對策[J].外國空軍訓練,2009(6):9-11.
[3]連魯軍,白雪峰.預警機的作用與發展趨勢[J].當代軍事文摘,2005(12):29-31.
[4]酈能敬.預警機系統導論[M].北京:國防工業出版社,1998.