基于FPGA的車牌識別算法研究
2014-10-20 03:04:00劉偉劉廣文
科技資訊 2014年24期
劉偉 劉廣文
摘 要:車牌自動識別系統在實現智能交通系統方面發揮著重要作用,整個系統包括車牌定位、字符分割和字符識別三部分。本設計先確定車牌在獲取圖像中的具體位置,從而把車輛牌照定位出來,進而對車牌用局部投影的方法進行字符分割,最后采用模板匹配法進行車牌字符的識別。本文提出的方法具有實時采集視頻圖像,車牌定位準確,分割及識別效率高的優點。
關鍵詞:FPGA 車牌識別 局部投影 模板匹配
中圖分類號:TP391.41 文獻標識碼:A 文章編號:1672-3791(2014)08(c)-0026-01
隨著道路交通智能化的逐漸普及,我國的道路交通事業迅猛發展,傳統的管理模式已經滿足不了實際的需要,自動化、嵌入式和圖像處理等技術在交通領域的廣泛使用大大的提高了道路交通智能化的水平,對車輛牌照的識別技術在交通管理方面的重要性也日益凸顯。由于每個機動車都有其唯一的汽車牌照,因此,通過獲取到車牌信息就可以對駕車人進行有效的道路交通管理,車輛牌照識別系統的正確率識別率大小也就顯的日趨重要。本文設計完全滿足系統實時性的要求。
1 工作過程
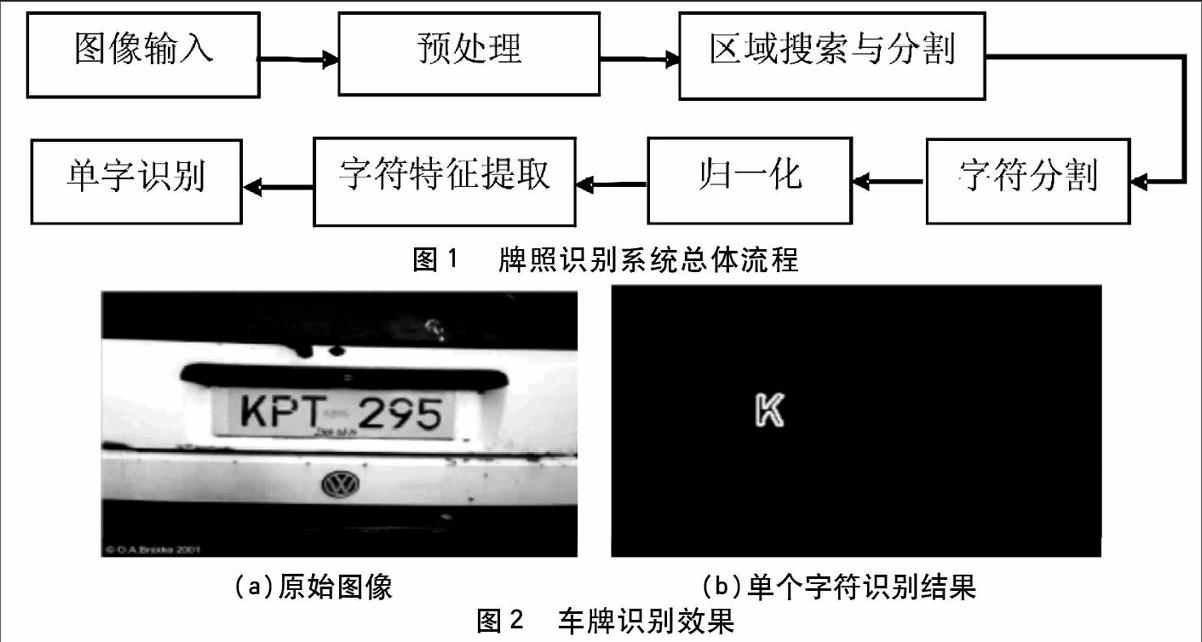
車牌識別系統在智能交通系統中應用廣泛,其中數字圖像處理與字符識別是最重要的兩門技術。系統總體框圖如圖1所示,其基本工作過程如下。
(1)當有車輛經過拍攝區域時,預先設置好的光電傳感器被觸發,并喚醒識別系統,使其處于工作狀態。負責連接攝像頭的光快門此時控制設置在車輛四周的高清相機同時對車輛進行抓拍,從而獲取圖像。
(2)抓拍到的圖像經過視頻卡輸入計算機進行預處理,預處理過程主要包括圖像轉換、圖像增強、中值濾波和水平校正等。
(3)檢索模塊負責搜索與檢測牌照,并定位、分割出包含車牌字符信息的矩形區域。
(4)對車牌的七個字符進行二值化處理,并分割出單個字符,最后輸入字符識別系統進行識別。
2 車牌識別算法設計
2.1 總體設計
整個識別系統包括定位和識別兩大部分。最初的圖像應具有較高的對比度和清晰度。只有這樣才便于對車牌圖像進行字符的分割和識別。但是受到圖像采集部分工作于條件復雜的戶外環境,加之車牌的光滑度、光照度、抓拍時CCD相機與車輛所成的角度和距離以及車輛行駛速度等諸多不確定因素的影響,圖像可能有模糊、傾斜和污損等缺陷,因此需要對初始圖像在識別前進行預處理。
2.2 圖像采集與平滑處理
本文選擇的是普通的藍底白字類牌照,藍色B通道對應的牌照區域為一亮的矩形,而在該區域中并沒有呈現出字符。因為白色與藍色在通道中并無區分,而在G、R通道或是灰度圖像中情況卻并不是如此。對白底黑字的牌照用R通道,綠底白字的牌照用G通道,牌照區域的位置就顯而易見,也為后續做進一步處理提供了方便。
當圖像受到嚴重噪聲干擾時,可以通過低通濾波器來濾除噪聲,但有時為了簡便,在空域中也可以采用求鄰域平均值的方法來削減噪聲。然而,圖像灰度在平滑處理的時候會發生很大變化,此時對字符邊緣和輪廓等區域會變得模糊不清。為了消除模糊現象,我們預先設置好中心點像素值與其鄰域平均值的差值,只有大于該閾值的點才能替換為鄰域平均值,從而大大削弱圖像模糊現象。
2.3 牌照定位與字符分割
牌照定位在車牌識別系統中是非常重要的一環,其主要目的是在圖像經預處理后的圖像中定位到牌照的具體位置。
本文采用垂直投影法進行分割,字符在垂直方向上的投影會在字符間或字符內的間隙取得局部最小值,且牌照的字符書寫格式、尺寸限制及其他一些條件均應得到滿足。分割出來的字符一般要進行進一步處理。本文只對車牌進行歸一化處理來識別,接著進行后期的處理。
2.4 字符識別
模板匹配算法首先對待識別字符進行二值化處理,并將其尺寸大小進行縮放以便跟字符數據庫中模板的大小保持一致,接著與所有的模板進行一一匹配,最終選出一個最佳匹配項。
3 算法驗證和測試
在FPGA開發環境下使用Qsys系統互聯,將各個IP與處理器進行有機互聯,從而達到硬件與軟件協同工作的目的。最終的車牌識別效果如圖2所示。
4 結論
本文在FPGA集成開發環境Quartus II軟件中分別對圖像進行灰度化、二值化、定位、分割及識別等操作,最終顯示出車牌字符。系統具有視頻圖像采集實時,定位分割準確和識別率高等優點。但從實驗結果來看,車牌定位和字符識別的算法對于污染特別嚴重的車牌有待進一步的改進。
參考文獻
[1] 岡薩雷斯.數字圖像處理[M].2版.電子工業出版社,2007,8.
[2] 郁梅.基于視覺的車輛牌照檢測[M].計算機應用研究,1999(5):65-67.
[3] D.Crookes, K.Benkrid.An FPGA Implementation of Image Component Labelling[J].SPIE,Vol.3844,1999.endprint
