微電網的能量協調控制策略研究
2014-10-21 20:04:55施芝元晏睿婷趙毅峰
電子世界 2014年6期
關鍵詞:控制策略
施芝元 晏睿婷 趙毅峰

【摘要】近年來,由分布式電源組成的微電網以其高可靠性、可持續性,成為眾多學者研究的熱點。微電網是一個小型的配電網系統,為分布式電源的接入提供了一種可行方法。微電網有并網和孤島兩種運行狀態,并網時可以從大電網獲取電能或向大電網提供電能,當大電網出現故障時,微電網能與大電網斷開單獨運行,微電源和存儲設備必須合作才能維持微電網孤島運行時的能量平衡,因而微電網的協調控制策略一直是一個研究的熱點。文中列舉并討論了現有的微電網協調控制策略,對這些不同的控制策略進行比較分析,提出根據微電網不同運行模式和影響因素采取的相應的控制策略。
【關鍵詞】微電網;控制策略;分布式電源;并網;孤島
1.引言
隨著人們對電力需求的日益增長,大電網在過去的幾十年中得到了飛速的發展,它所體現出來的優勢,已然成為主要的電力供應渠道。但是,由于電網規模的不斷擴大,傳統的大規模電力系統的弊端逐漸顯現出來。在發展集中式電網的同時,在負荷的周圍配置一些分布式電源,如果大電網出現故障突然斷電,周圍的分布式電源能夠及時的給就進的負荷提供電力支援。但是,分布式電源的接入是一個難點。分布式電源并入大電網時,會帶入大量的電子元器件,從而產生了大量的諧波,其發電的方式和轉換器的工作模式會影響諧波的幅度和階次。其次,分布式電源相對于大電網來說是一個不可控源。
為了協調大電網與分布式電源間的矛盾,充分挖掘分布式電源的潛能,美同電氣可靠性技術解決方案聯合會(CRETS)研究了分布式電源對低壓電網的沖擊,增強電力系統的可靠性,提出了微電網(MG,Micro-grid)的概念:微電網是一種由負荷和微型電源共同組成的系統,它可同時提供電能和熱量;微電網內部的電源主要由電力電子器件負責能量的轉換,并提供必需的控制;微電網相對于外部大電網表現為單一的受控單元,并可同時滿足用戶對電能質量和供電安全等的要求。
微電網的運行模式十分靈活,它既可以與大電網相連,作為大電網的一個分支,當微電網無法滿足負荷需求時,主網對其提供電量補充,當電量富余時,可以對主網提供電量支持;同時當主網出現故障或有特定需要時,微電網又可以與主網斷開連接,單獨運行,即為孤島運行模式。但與常規的發電機組不同,由于微電網中分布式電源的種類和特征不同,需要一些特殊的協調控制方式才可能使其滿足負荷對系統電壓和頻率的要求。同時,跟蹤微電網中負荷的變化,也需要針對微電網中的分布式電源采取不同的協調控制策略。
本文先詳細介紹了微電網的結構組成,然后對現有的微電網協調控制策略做了一個詳細的研究,并將不同的控制策略方法進行對比分析,得出了在不同情況下應該采用的控制策略的結論,有一定的參考價值和實際意義。
2.微電網的具體結構
2.1 微電網的基本結構
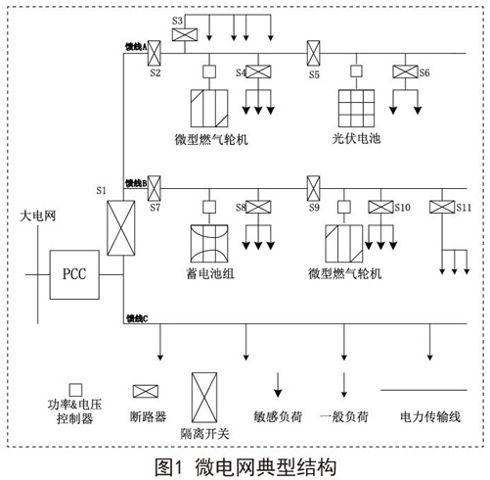
圖1所示為微電網的結構圖,微電網通過隔離變壓器與大電網連接。微電網中,大部分微電源都使用電力電子變換器和負載相連接。微電網內部有三條饋線,其中饋線A和B上連接有敏感負荷和一般負荷,根據用電負荷的不同需求情況,微電源安裝在饋線上的不同位置,而沒有集中安裝在公共饋線處。饋線C上接入一般負荷,沒有專門配置微電源,而直接由電網供電。每個微電源出口處都配有斷路器,同時具備功率和電壓控制器,能夠調整各自功率輸出以調節饋線潮流。當檢測到大電網出現電能質量問題或供電中斷時,隔離開關S1動作,微電網轉入孤島運行模式,以保證微電網內的重要敏感負荷能夠不間斷供電,同時各微電源在能量管理系統的的控制下,調整功率輸出,保證微電網正常運行。對于饋線A、B、C上的一般負荷,系統則會根據微電網功率平衡的需求,將其切除。
圖1 微電網典型結構
微電網中包含了光伏,小型燃氣輪機和蓄電池等微電源形式的電源。在微電網中有各種不同類型的負荷,需要用不同的策略進行供電,如某些當地的負荷可以直接進行供電。微電網可以通過主隔離器與主電網實行并網運行,并改善主網的電能質量。
2.2 微電源的分類
微電源是微電網的重要組成部分。主要為可再生能源,如風能、太陽能、生物質能等,發電系統類型主要有風力發電機(Wind Generator)、太陽能電池(PV Panel)、微型燃氣輪機(Micro-Turbine)、燃料電池(Fuel Cell)等,系統容量約為20kW~10MW。
風力發電是將風能轉化為機械能,再將機械能轉化為電能。它是一種沒有公害的能源,并且取之不盡,用之不竭,可以根據情況因地制宜地利用風力發電。
太陽能發電分為光熱發電和光伏發電兩種,目前光伏發電的發展速度較快。它是根據光生伏特效應原理,利用太陽能電池將太陽光能直接轉化為電能。但輸出的功率由光能決定,因此是斷續的,不能與負荷完全匹配,因此常常需要蓄電池或其他輔助系統。一般光伏電池發電模塊擁有最大功率點跟蹤(MPPT)功能、電池板監測和保護功能、逆變并網等功能,以保證光伏電池能夠可靠、安全地運行。
微型燃氣輪機是一類新發展起來的小型熱力發動機,其單機功率范圍25~300Kw,具有體積小、質量輕、發電效率高、污染小、運行維護簡單可以統一調度。具有電力電子轉換和控制接口的微型燃氣輪機可跟隨電網的電壓和頻率變化,主要起負荷跟蹤和削峰填谷的作用。它在完成基本的有功功率控制的同時,還可以調節系統輸出的無功功率,實現電壓調節和功率因數的調整。因此是目前最成熟、最具有商業競爭力的分布式電源之一。
3.微電網的能量協調控制策略
微電網的能量協調控制策略與傳統電力系統有很大的不同,主要原因如下:分布式電源(DG)具有靜態和動態特性,尤其是電磁耦合單元,不同于傳統大型水輪機;相當一部分微電網內部電源為不完全可控電源,如風力發電機;短期和長期儲能單元在微電網控制中起重要作用;在經濟上要求微電網在正常運行時,能夠連接或切除分布式電源;微電網要能夠提供較好的電能質量和對一些負荷提供特殊的服務。
微電網相對于主網來說可以視作一個整體模塊,對內可以提供滿足微電網內部負荷需求的電能,而實現這些功能,必須具有良好的微電網協調控制策略,做到能夠基于本地信息對電網中的事件做出快速獨立的響應。具體來講,微電網控制應當保證:任意一個微電源的接入不對系統運行造成影響;自主選擇運行點;平滑地與大電網并列、分離;對有功、無功進行獨立控制;具有校正電壓跌落和系統不平衡的能力。
目前,微型電網常用的控制策略主要分為三種,主從型(master-slave operation),對等型(peer-to-peer control)和多代理型(Multi-Agent)。
3.1 主從控制法
主從控制按照是否以某一分布式電源作為主單元可分為以分布式電源作為主控制單元的主從控制和以上層中心控制器作為主控制單元的主從控制兩大類。
(a)以分布式電源作為主控制單元
以一個分布式電源作為主單元,來檢測電網中的各種電量,根據電網的運行情況來采取相應的調節手段,通過通信線路來控制其他“從屬”電源的輸出來達到整個微電網的功率平衡,使電壓頻率穩定在額定值。當微電網在并網模式運行時,大電網可以穩定系統的頻率,微電網自身不需要進行頻率調節;而孤島模式運行時,主從控制系統中的主控制單元需要維持系統頻率和電壓的穩定。所以,在并網運行時微電網中所有分布式電源采用P-Q控制,即微電網不參與系統頻率調節,只輸出指定的有功和無功功率;在孤島運行時主單元采用V-f控制維持系統的電壓和頻率恒定。
(b)以中心控制器作為主控制單元
隨著微電網概念的發展和多微電網概念的出現,以中心控制器作為主控制單元又可以分為對一個微電網使用分層控制和對多個微電網的管理使用分層控制。這種主從控制的原理是上層管理系統管理底層多個分布式電源和各類負荷的一種控制方法,所以底層分布式電源與上層管理系統之間亦需要通信聯系。但是這種通信聯系是弱聯系,即使短時間通信失敗,微電網仍能正常運行。
3.2 對等控制法
所謂對等控制(peer-to-peer operation)顧名思義,每個分布式電源有相等的地位,沒有一個單元像主控制單元或中心儲能單元那樣對微電網有著特別重要的作用。所有的微電源以預先設定的控制模式參與有功和無功的調節,從而維持系統電壓頻率的穩定。對等控制策略基于外特性下降法,分別將頻率和有功功率、電壓和無功功率關聯起來,通過一定的控制算法,模擬傳統電網中的有功-頻率特性曲線和無功-電壓曲線,實現電壓、頻率的自動調節而無須借助于通信。
兩種基于下垂特性的典型控制方法在對等控制策略的分布式電源控制中被廣泛應用。一種是f-P和V-Q下垂控制方法,它利用測量系統的頻率和分布式電源輸出電壓幅值產生分布式電源的參考有功和無功功率,如圖2所示。另一種方法是利用測量分布式電源輸出的有功和無功功率產生其輸出的電壓頻率和幅值,稱作P-f和Q-V下垂控制法,如圖3所示。
圖2 f-P和V-Q下垂控制
圖3 P-f和Q-V下垂控制
圖4 多代理系統結構圖
3.3 基于多代理技術的控制法
該方法將傳統電力系統中的多代理技術應用于微電網的控制系統,提供了一個能夠嵌入各種控制性能但又無需管理者經常出現的系統。該方法主要的思路為:微電網中各底層元件(包括發電機、負荷等)都作為獨立的Agent運行;同時設定微電網Agent對這些底層Agent進行管理,例如接受元件Agent信息、根據微電網運行狀況及調整策略為其提供相應的控制策略等;微電網Agent與上級電網Agent之間通過通信協調解決各Agent之間的任務劃分和共享資源的分配;上級電網Agent負責電力市場以及各Agent間的協調調度,并綜合微電網Agent信息做出重大決策;不同的Agent還保持一定量的數據通信以更好地保證各自決策的合理性。這種結構與通信方式適應了微電網分布、復雜、靈活的特性。其結構圖如圖4所示。
目前多代理技術在微電網中的應用多集中于協調市場交易和對能量進行管理方面,還未深入到對微電網的頻率、電壓等進行控制的層面。
4.微電網運行目標和不同控制策略的比較分析
4.1 不同模式下的運行目標
在正常情況下,微電網并網運行,由大電網提供剛性的電壓和頻率支撐,內部微電源工作在電壓源或電流源狀態,在能量管理系統控制下,調整各自的功率輸出。微電網和大電網共同承擔內部負荷。并網運行發生故障時,由于微電源的分布式特性,可由微電源能量管理系統迅速定位故障點位置。當故障點在微電網內部時,由微電網能量管理控制器通過綜合各微電源的信息給出相應調整;當故障點在微電網外部時,通過主網調度中心與各高級調度中心相互通信以確定故障嚴重程度。如超出自身調節能力,相應微電網可選擇與主網斷開,進入孤島運行,這樣可同時保證主網與微電網的安全穩定運行。
微電網孤島運行的基本要求是微電源必須建立一個穩定的電壓和頻率,并且使之處于允許范同內。負荷和微電源常用來維持功率平衡以此確保微電網的電壓和相角的恒定。因此控制策略必須確保敏感負荷的正常供電。
4.2 各個控制策略的比較
下垂控制方法是基于“即插即用”與“對等”的控制思想,采用與傳統發電機相類似的下垂特性曲線進行控制,將系統的不平衡功率動態分配給各機組承擔,具有簡單、可靠、易于實現的特點。但該方法沒有考慮系統電壓與頻率的恢復問題,也就是類似傳統發電機中的二次調整問題,因此,在微電網遭受嚴重擾動時,系統的頻率質量可能無法保證。此外,該方法僅針對基于電力電子技術接口的微電源間的控制。如果只要求在發電機或負荷改變時,對功率的不平衡提供快速響應的功能,就需要有存儲容量足夠的存儲單元;如果存儲單元僅僅用于功率快速產生和吸收,不需要長時間輸出功率,在采用主從站控制方法和多代理的協調方案中也可以使用容量較小的存儲單元。
如果逆變器有孤島檢測的能力,所有的協調方法中,除了基于多代理的方法,其他方法都不要求微電源、存儲單元和控制器之間進行通信。具有孤島檢測能力的存儲單元和微電源能自動從P-Q控制切換到下垂控制,反之亦然。然而,如果微電源依靠斷路器開關等信息來決定微電網的狀態,就必須在控制器和微電源間安裝快速通信裝置。
微電網元件的關系也影響協調方法的選擇。如果微電源屬于幾個不同用戶所有,每個用戶都希望利益最大化。如果并網時微電網向主電網輸出功率,孤島時由于需求的減少,將迫使微電源減少發電量,它們將競爭發電。基于多代理的P-Q控制最適合于這種情況。用戶和微電源的所有者要事先通過協議來安排需進行交換的總功率。
如果微電網是屬于單個用戶,所有的協調方法都可以采用,即微電源不用去競爭發電。微電網控制器的目標是整個利益最優化,而不是單個元件利益最大化。對于復雜多微電網系統,分布式控制策略和多代理控制策略結合是最佳的選擇。
然而,在眾多的微電網能量控制策略中,基于多代理技術的微電網控制策略是最具發展前景的技術之一。這種方法主要是將計算機科學中廣為使用的Multi-Agent技術應用在微電網的控制系統之中。這其中各個Agent都具有很強的自治性和可靠性,可以獨自進行決策、運行管理等行為,這極大地滿足了微電網對于權限下發到底層的要求,可以在諸多電子元件中合理使用。
在實際微電網中,可能有多種類型的分布式電源接入,既有像光伏風機這樣隨機性較強的分布式電源,又有燃氣輪機、燃料電池這樣比較穩定和容易控制的分布式電源或儲能裝置,不同類型的分布式電源控制特性可能差異較大。對于同一種類型的分布式電源,在微電網中作用不同時,也可采用不同的控制策略。單一的控制策略顯然不能滿足微電網運行的要求。因此結合微電網內分布式電源和負荷都具有分散性的特點,根據分布式電源的不用類型和作用采用不用的控制策略,可以采用綜合控制方式。
5.結論
由于微電網中的微電源種類樣式繁多,控制方式不同,同時微電網的運行模式也有并網和孤島兩種模式,因此微電網中的協調控制問題一直是學者們研究的熱點。本文針現有的微電網能量協調控制策略做了總結討論,比較了不同控制策略的應用條件和優劣勢,分析了不同情況下應采取的相應的微電網控制策略,具有一定的參考價值和實際意義。
參考文獻
[1]楊艷天,張有兵,翁國慶.微網并網控制策略的研究[J].機電工程,2010,27(2):14-16.
[2]張建華,黃偉.微網運行控制與保護技術[M].北京:中國電力出版社,2010:113-121.
[3]李蓓,李興源.分布式發電及其對配電網的影響[J].國際電力,2005,9(3):46-49.
[4]陳永淑,周雒維,杜雄.微電網控制研究綜述[J].中國電力,2009,42(7):31-35.
[5]JOYARZABAL J,JIMENO J,RUELA J,et.Agent-based micro grid management system[C].International Conference on Future Power Systems,Amsterdam,Netherlands,2005:1-6.
[6]F.Katiraei,M.R.Iravani.Power Management Strategies for a Micro-grid With Multiple Distributed Generation units[J].IEEE Trans on Power Systems,2006,21(4):1821-1831.
[7]BARKLUND E,POGAKU N,PRODANOVIC M,et al.Energy management in autonomous micro-grid using stability-constrained droop control of inverters[J].IEEE Trans Power Electronics,2008,23(5):2346-2352.
[8]LOPESJ A P,MOREIRA C L,MADUREIRA A G.Defining control strategies for analyzing micro-grids islanded operation[J].IEEE Trans Power Systems,2006,21(2):916-924.
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36