自動尋跡機器人電控系統設計
2014-10-21 20:04:55王順利王景夏石宇辛紹杰
電子世界 2014年6期
王順利 王景夏 石宇 辛紹杰

【摘要】自動避障尋跡機器人能夠在復雜的路況下精確地完成指定工作。介紹了所設計的基于攝像頭智能識別路徑的機器人的組成,完成了基于單片機的電控系統硬件的設計,采用C語言編寫控制系統的軟件。該機器人的試驗證明,應用該電控系統的機器人較好地完成了預期功能。
【關鍵詞】電控系統;自動循跡;無線視頻;C語言
自動避障尋跡機器人主要由機械系統、電控系統及其軟件、攝像系統、電源系統等組成。該機器人采用攝像頭采集數據,精確度高,采集快,很好實現了系統的功能要求。
1.電控系統硬件設計
電控系統主要包括:電源電路,電機驅動電路,主控電路和遙控電路等。電控系統硬件的設計采用飛思卡爾公司的S12XS128芯片。該芯片有8路AD,2路串口通信和8路PWM。運行時鐘可以超頻到64MHz,完全可以滿足系統的需求。
電控系統中,S12芯片需要5V電壓和200mA電流;舵機的供電電壓為5V,電流為200mA;直流電機需要直接接電壓7.2V,電流800mA的電源。系統選用電壓7.2V、功率1200mAh的鋰電池供電;穩壓芯片采用兩片LM7805芯片提供5V電壓,一路為舵機供電,另一路為其他模塊供電,電源電路如圖1所示。
圖1 LM7805電路圖
所設計的無線傳輸電路由單片機,車載無線接收發器和電腦端無線收發器組成,采用RS232通訊協議傳輸數據。無線傳輸收發器采用匯睿微通公司的XLTTL-USB串口轉USB接口和XL02-232API模塊組成。
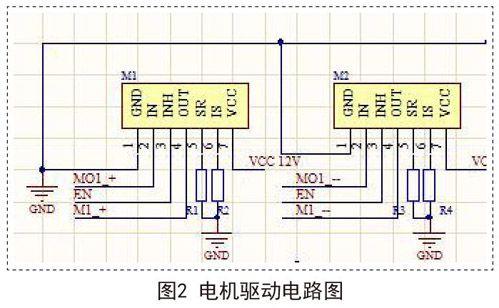
電機驅動電路采用智能功率芯BTS7960芯片,該芯片是應用于電機驅動的電流半橋高集成芯片,它帶有一個P溝道的高邊MOSEFT,一個N溝道的底邊MOSFET和一個驅動IC,工作電壓5.5V-27.5V,最大驅動電流43A,工作頻率25KHz,在本電路設計中,直流電機工作電壓7.2V,電流1A,工作頻率25KHz,2塊BTS7969芯片組成一個全橋電路,控制電機的正反轉。驅動電路如圖2所示。
圖2 電機驅動電路圖
無線攝像頭采用諾維安CC321型號的USB無線攝像頭。其發射頻率可以在2414MHz,2432MHz,2450MHz,2468MHz之間選擇,傳輸距離為100米。可以滿足本系統的要求。接收器為該攝像頭專陪的接收器。
2.軟件設計
電控系統的軟件使用C語言編寫,調試程序使用LABVIEW編寫。
2.1 下位機采集程序
系統的單片機程序選用C語言編寫。下位機程序主要完成對舵機的轉向控制,直流電機的速度控制,以及同上位機的串口通訊。
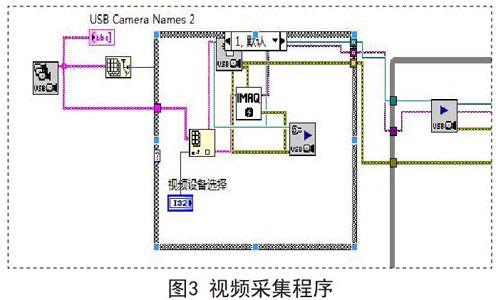
圖3 視頻采集程序
單片機上電復位后,單片機進行系統初始化,引腳初始化,之后進入電機舵機控制程序,串口通訊程序,當前命令修改程序在串口中斷里完成。下位機程序接收的命令主要是前進,后退,左轉和右轉。
2.2 上位機調試程序
視頻采集程序采用LabVIEW vision模塊。首先使用IMAQ USB Enumerrate Cameras VI選擇視頻設備,然后使用IMAQ Create程序建立一個圖像數據緩沖區,分配內存空間,在while循環里,由IMAQ Grab Acquire抓取的圖像傳送到Image Display控件顯示。視頻采集程序如圖3所示。先列舉出視頻設備,如果有設備的話,選擇要顯示的設備并在while循環中顯示圖像。實際應用中,由于IMAQ Snap.vi既要實現圖像數據采集操作,還要完成許多初始化和資源釋放的操作,其運行速度較慢。通過使用IMAQ USB Grab Acquire.vi實現連續圖像采集后,其采集每幀圖像的時間有較大降低。
參考文獻
[1]Jeffrey Travis,Jim Kring.LabView大學實用教程[M].北京:電子工業出版社,2008.
[2]陳樹學,劉萱.Labview寶典[M].北京:電子工業出版社,2011.
本項目受上海市大學生創新活動計劃資助(項目編號:2012SCX87)。
作者簡介:
王順利(1991—),男,大學本科,現就讀于上海電機學院機械設計制造及其自動化專業。
王景夏(1990—),男,大學本科,畢業于上海電機學院機械電子工程專業。
石宇(1989—),男,大學本科,現就讀于上海電機學院機械設計制造及其自動化專業。
辛紹杰(1963—),男,上海電機學院教授。