某電廠5號機鍋爐主控波動原因分析及預控措施
2014-10-21 20:04:55符濤
電子世界 2014年6期
符濤
【摘要】針對某電廠5號機鍋爐主控波動問題的原因進行詳細的討論和研究,并提出相應的預控措施,希望為電廠企業的鍋爐設備的問題解決和維護日常正常運轉的工作提供一些借鑒和參考。
【關鍵詞】電廠鍋爐主控波動;原因;預控措施
1.某電廠5號機鍋爐主控波動事件發生過程
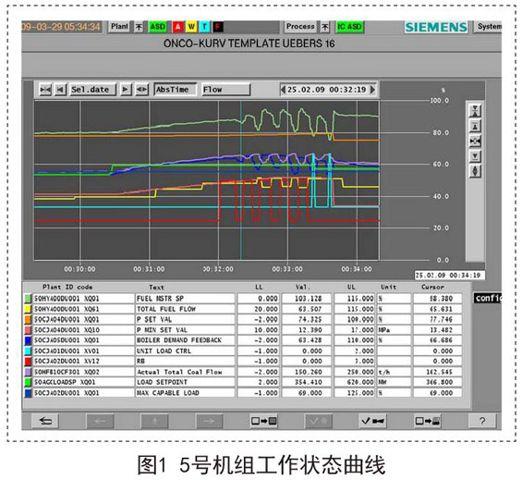
某電廠5號機組的運行方式為AGC,機組的負荷為332MW,正常運行參數為:5C/5D/5E磨運行;B-MAST指令:58.20%;總煤量可達138t/h,熱值修正0.98,主汽壓力12.7Mpa,汽包水位±10mm。自00點30分00這個時刻開始,一直到00點34分00,5號鍋爐主控機組發生了如圖1的波動變化:
圖1 5號機組工作狀態曲線
從圖1可以看出,自時間00點30分26左右,機組的AGC運行負荷指令變為367MW,機組開始以1.5%的速率增加負荷量;在00點32分11左右,機組的B-MAST指令為69%,達到了輔機的最大輸出力值;在時刻00點32分20機組的負荷變為355MW,而B-MAST開始發生大幅度的上下波動情況,期間B-MAST指令最大為72.03%,最小低至58.06%,從而導致過量的煤量產生了很大的波動。此時,運行維護人員將AGC負荷的上限設置為355MW,但是依然沒有解決B-MAST波動的問題。在00點33分36運行維護人員果斷的采取了解除CCS措施,將機組的煤量穩定在150t/h,機組的各項運行參數才逐漸呈現穩定趨勢,機組汽包水位和爐膛負壓等參數也保持正常水平;在后續的00點41分48運行維護人員啟動了5F,是煤機正常工作后,在投入CCS和AGC,整個機組恢復到了正常的運行狀態。
2.5號機鍋爐主控波動原因分析
針對上述的鍋爐主控波動事件進行全面的了解和分析可知:運行過程中出現了兩個比較突出的問題,首先,5號機鍋爐的機組的熱值修正系數為0.98,保持當時3臺磨運行的情況下機組是完全可以維持在370MW運行的,但是,加負荷達到355MW時,就已經發生了鍋爐主控的最大輸出力就已經超出了輔機的最大值,是什么原因導致的這種問題的發生呢?第二,當鍋爐主控大于最大輔機的輸出力后,通常情況下都會觸發RB,而就當時的情況來看機組的輔機最大輸出力達到了69%,卻沒有觸發RB。
2.1 鍋爐主控超出輔機最大出力值原因分析
綜合該電廠的機組的鍋爐控制模式來看,外界的負荷指令變化會使主控模塊依據功率的偏差情況調整調門的開度,以便增加進氣量,適應負荷的變化;而汽機的進氣量變化會引起機前氣壓的變化,從而使實際的壓力值和設定的壓力值產生偏差,引發鍋爐主控模塊的快速改變鍋爐燃燒率和給水量的動作,以保證鍋爐的蒸發量同汽機的需氣量盡量保持一致。燃燒量的改變就會使煤量存在過調量,過調量和變負荷量又是正比例關系,速率變化越大,過調量就會越大,AGC控制機制下的變負荷量都會固定在1.5%,過調量的增加同機組的定壓-滑壓-定壓的運行方式相互作用就會導致最終的機組在加負荷過程中鍋爐主控輸出值大于輔機最大值的問題。
2.2 鍋爐主控輸出力超出輔機最大值之后,沒有觸發RB的原因分析
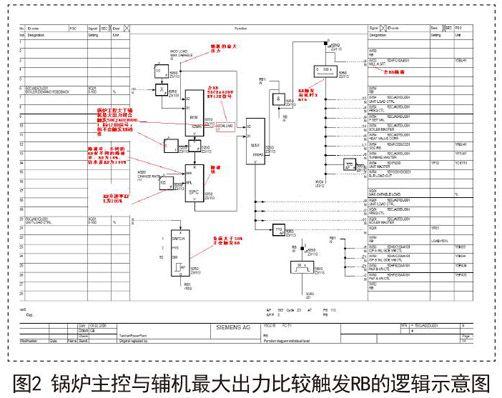
這個問題的具體原因還要配合RB的回路圖進行分析,鍋爐主控與輔機最大出力比較觸發RB的邏輯圖如圖2所示。
圖2 鍋爐主控與輔機最大出力比較觸發RB的邏輯示意圖
從圖2中我們可以看出:鍋爐主控線路的設計原理通常是要與最大計算出來進行確定,并會在計算出的結果上減掉一個常數1,并通過一個限速塊的設計,也就是我們說的RB速率塊,RB期間是一直跟蹤輔機的最大出力信息的,當升速達到100%時,鍋爐的主控下降速率就會通過限速塊中的KML實現,一旦發現主控輸出力大于輔機的最大值時,就會觸發RB。也就是說觸發RB需要三個條件,首先,鍋爐主控輸出力大于輔機最大值;其次,輔機的最大出力發生突降情況;最后是機組的負荷要大于50%。上述的電廠5號機鍋爐主控只是滿足了其中的個別條件,因此不會觸發RB。
3.針對鍋爐主控波動問題建議采取的預控措施
從某電廠的鍋爐主控波動事件和具體院校分析可知,在加負荷之前,鍋爐的實際主汽壓力和壓力指令的偏差還是比較小的,當開始加負荷后,汽機主控和鍋爐主控差距的不斷加大,會導致煤量的逐漸增加,最終導致壓力偏差的上下波動,引發鍋爐主控波動的問題。該電廠的5號機鍋爐主控采用了PID的入口偏差回路設計方式,雖然從一定程度上來講,該預控措施是可以避免在加負荷過程中出現的機組的燃料量超出輔機最大計算出力值,但是,由于鍋爐燃料總量的快速降低,也會導致PID入口偏差的增大,從而引發鍋爐主控的增加,鍋爐主控的快速增加就會帶動煤機的不斷加煤,增加了鍋爐的總燃料量,而總燃料來那個同最大計算出力的偏差就會出現負值,此時,鍋爐主控PID入口不得不采取主控突降措施,因此引發鍋爐主控的振蕩和失衡。
因此,我們建議采用PID入口偏差回路設計的鍋爐主控,應該做到兩方面的工作:首先,確保熱值的修正值設定不要過低;其次,盡量避免鍋爐主控接近或者大于輔機最大出力值。在實際的工作中,出現機組加負荷的情況時,一旦發現鍋爐主控出力接近機組輔機最大值,就應該迅速設定AGC負荷上限,觸發鍋爐主控的自動回調機制,然后,在逐漸增加負荷,避免出現鍋爐主控產生震蕩問題后,再別動尋找接觸協調措施的現象。
除了上述針對鍋爐主控波動原因的預控措施之外,還要做好以下幾方面的工作:
(1)大力開展以人為本的電業安全管理規范的普及工作,深化改革,強化安全管理,降低電業的人身傷亡事故的發生。
(2)危險的主體承擔者是人,危險因素的控制方法不單單要從物質的角度出發,消除缺陷、發現隱患,攻克工作中遇到的危險點。同時,還要從管理的角度出發,發揮工作人員的主觀能動性,將危險意思呢的控制和消除方法普及到電力生產中的每一個環節當中,根據不同人員的作業內容、工作范圍和環境條件等因素,分析和發現潛在的可能危及人身或者設施安全的不安全因素,再根據相應的標準規程,采取可行、有效的防控措施,防止事故的發生。
(3)建立健全電廠的安全臨檢和監督機制。對于高發和易于發生危險的工作環節進行重點監控,并嚴格規范工作人員上崗要求,相關崗位必須具有專業人員從事資格證,并且開展定期的安全教育和培訓工作,提高工作人員的自我安全管理意識,加強自我保護能力。監督機制是一種有效的危險預想式工作方式,能夠時刻提醒工作人員,要時刻注意不安全行為和不安全因素,可以有效降低事故的發生率,達到安全生產的目的。
4.結語
綜上所述,電廠的鍋爐機組的波動情況比較復雜,且發生迅速,在實際的工作中還要不斷的結合日常管理、維護經驗,不斷的總結和學習先進的電廠鍋爐機組維護和安全預控措施。強化管理和監督工作,切實提高電廠鍋爐機組的運行的穩定性、可靠性和安全性。
參考文獻
[1]潘笑,汪璐,鄧培敏,黃冬蘭.神經網絡PID在直流爐汽溫控制中的應用[J].微計算機信息,2007(16).
[2]李芳芹,宋涵,任建興.燃煤鍋爐主汽溫度波動原因分析及解決方案[C].2008全國能源與熱工學術年會論文集.
[3]駱惠,宋志榮,王振國.火電廠鍋爐鋼結構腐蝕勘驗及其解決方案[A].中國鋼結構協會鍋爐鋼結構分會第十三屆年會論文集[C].2012.
[4]賈崗.運行控制中提高鍋爐安全性分析[J].電源技術應用,2013(10).
[5]黃鶯,張朝陽,余志森.超臨界直流爐機組的控制策略特點[J].華北電力技術,2006(11).