運動目標去除陰影的跟蹤
2014-10-21 20:04:55陳云彪鄭賢超
電子世界 2014年6期
陳云彪 鄭賢超

【摘要】運動目標的影子會降低視頻監控的性能,本文提出了一個提高目標跟蹤精確率的去影算法。該算法由四部分組成:建立一個實時性很強自動更新的背景模型,提取運動目標區域,消除運動目標的影子,最后對已去影的運動目標進行檢測和跟蹤。實驗結果表明我們的算法在處理目標去影跟蹤上有著良好的性能,能在一定的程度上解決運動目標的遮擋問題,并去除目標自的陰影,提高了運動目標跟蹤的魯棒性。
【關鍵詞】背景建模;陰影去除;灰度直方圖;背景相差;跟蹤
1.引言
在日新月異的計算機視覺技術發展中,行人定位變得越來越重要,尤其在智能視頻監控領域。智能視頻系統可以迅速從原始視頻幀中提取有用信息,同時它不僅解決了單一對象的細節檢測,還增強了運動目標去影檢測跟蹤的魯棒性[1]。運動目標的跟蹤意味著要準確檢測其在視頻序列中的位置和形狀。運動的目標和其他靜止目標都會在強光下產生影子,因此運動目標的其中一個跟蹤難度就是去除陰影的影響,不然就會降低跟蹤精度。
在視頻系列中對運動目標的陰影去除分為基于模型和基于屬性特征[2]。基于模型的有較大的局限性,是依據統計信息對特定場景的處理,需要事先知道場景分布,光照不同等先驗信息,所以難度較大可行性較小。基于屬性的方法則是對顏色、亮度等方面的屬性來檢測陰影[3]。陰影有和運動目標相同的速度,本文提出了一個多個運動目標跟蹤的監控系統。背景由一個固定的攝像機拍攝,我們的目標是從拍攝的視頻序列信息中實現精確跟蹤。該算法基于灰度直方圖空間來消除目標陰影并且對運動目標進行檢測跟蹤。在灰度直方圖空間中,根據運動物體和陰影之間像素值的不同可以將前景像素分為陰影和非陰影部分,用這種方式我們可以消除每一個陰影。在靜態背景下,我們使用了背景消除的方法去提取運動目標區域,同時基于灰度直方圖空間去除陰影,最后在去影后的運動目標區域對運動目標較為準確的跟蹤。
2.提取運動目標
我們運用高斯函數對背景模型進行更新,并運用背景相差法提取運動目標。背景圖像每個像素可以用K個高斯函數來表示,如下所示:
(1)
式中,K是混合高斯模型中高斯分布的個數,一般取3~5,Xt是在t時刻由紅、綠和藍色構成的像素值,表示在時刻t時刻的高斯分布的權系數估計值,和分別是均值向量和協方差矩陣,為高斯函數的密度函數。
(2)
(3)
(4)
通過高斯建模法背立后背景模型并更新后運用背景相差法來提取運動目標。背景相差法是攝像頭固定即背景靜止下運動目標提取的一種思路,建立背景模型下,當前幀差與背景圖像的差分圖像便是需要的運動目標。由此可知運動目標為:
(5)
式中I(x,y,t)為當前圖像,b(x,y,t)為背景圖像,n(x,y,t)為噪聲部分,這樣再依據閾值分割原理的判斷原則得到運動目標圖像,如下:
(6)
式中T為閾值。
3.灰度直方圖中陰影去除
在視頻系列中陰影去除的方法眾多,不少學者提出了運用色度和飽和度在陰影區域和非陰影區域的微小變化消除陰影[4]。也有學者在HSV空間根據顏色屬性設定相應的閾值去除陰影[5]。但是當場景發生變化或有噪聲引入時,在HSV空間檢測到的陰影區域和運動目標的區域接近,去除的結果也是不可靠的。我們根據前人的工作[6,7],我們運用了再灰度直方圖中去除陰影,這種方法消耗內存少,計算準確能更好的去除陰影。
在灰度直方圖中,陰影區域可以被映射到灰度直方圖中的像素空間中,在像素空間,可以顯示陰影區域和非陰影區域的灰度信息,在灰度直方圖中能有效的去除噪聲的影響。算法步驟如下:
1)把提取的運動目標圖像轉化灰度圖像。據此,根據真彩圖像轉換為灰度圖像的原理,再對圖像進行灰度統計,計算灰度直方圖的函數如下:
(7)
其中:
K{0,1,2,…,L-2},,H(k)為在圖像中出現的頻率,K為灰度值數,根據文獻[8],灰度直方圖中的函數定義為:
(8)
式中
K{0,1,2,…,L-2},L為灰度等級。
2)依據灰度直方圖中的函數計算直方圖勢函數,進而計算直方圖勢函數pH(k)的一階差分:p(k)=pH(k+1)-pH(k)
K{0,1,2,…,L-2}
3)p(k)第一個由負到正的拐點,即為灰度直方圖中的第一個極小值,對應的灰度值為為灰度分割閾值T。
4)根據以上式子,把提取出的運動目標進行閾值侵害,得到ft(x,y),式子如下:
(10)
在灰度直方圖中,陰影的灰度等級比提取的目標要低,灰度圖中的峰值和峰谷是不同的,根據灰度直方圖第的第一個波峰波谷的特性,在分析了灰度值方圖的峰谷后,我們選第一波谷作為檢測陰影的閾值[9],進行閾值分割后,得到的提取出的運動圖像便是去除陰影后的跟蹤圖像。
4.實驗結果
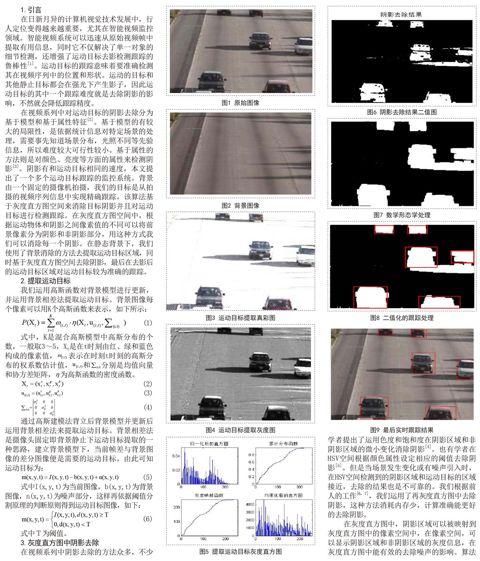
如圖1-4所示,我們選取了高速公路的測試場景,在這個場景中,運動目標多個,太陽較強,影子強烈,如果不進行去除陰影,目標的跟蹤會受到極大的影響。
提取運動目標的灰度圖通過算法生成歸一化的直方圖,因為有部分噪聲的干擾,因此,我們在運用均衡化的直方圖(如圖5所示)處理,根據波峰波谷的特性設定閾值并且在直方圖空間中去除陰影。
如圖6-9所示,我們的算法可以比較好的建立背景模型并進行更新,提取出的運動目標也更為準確,并且也包含陰影,在灰度直方圖中,灰度勢函數呈多峰多谷的分布,根據直方圖的峰值特性,自動設定閾值后可以比較好的去除目標陰影如圖6所示,但是去除陰影后還會包含有空洞,所以我們還進行了數學形態學的處理進行膨脹和腐蝕,處理后的結果如圖7所示,最后在進行目標實時跟蹤,因為比較好的去除陰影,所以跟蹤結果也可以比較精確無陰影的干擾。
5.總結
本文主要是運用了高斯函數來進行背景建模并實時的進行背景更新,背景相差來提取運動目標,并在灰度直方圖空間中對提取的運動目標進行陰影直方圖的統計,根據直方圖的特性,運用一階差分法選取了適當的閾值分割點。我們對實驗進行測試表明,該算法可以有效的去除光照變化,物體移動,場景微調等噪聲的影響,建立較為準確的背景模型,能夠完成灰度直方圖中閾值的分割及選取,對陰影進行檢測并去除,并對最后的運動目標進行跟蹤,我們的算法可以快速有效的實現。相對其它算法,我們的算法在準確率及速率上有所提高,可以比較好的運用在智能監控中。我們的算法可以有效的去除運動目標的噪聲干擾,未來的主要工作放在運動目標提取中的圖像分割上,消除陰影對前景信息的影響,并且比較好的解決運動目標的其它物體遮擋問題。
參考文獻
[1]Leone A,Distante C,Buccolieri F.A shadow elimination approach in video-surveillance context[J].Pattern Recognition Letters,2006,27(5):345-355.
[2]于東方,殷建平,張國敏.一種基于灰度直方圖的遙感影像陰影自動檢測方法[J].計算機工程與科學,2008,30 (12):43-44.
[3]吳亮.運動目標提取,陰影和鬼影檢測及去除算法研究[D].國防科學技術大學,2007.
[4]Zhou Y,Sun L,Zhang J.A shadow elimination method based on color and texture[C].IEEE,2010.
[5]Liu Y,Bin Z.The improved moving object detection and shadow removing algorithms for video surveillance[C].IEEE,2010.
[6]Cheng H D,Chen Y H,Jiang X H.Thresholding using two-dimensional histogram and fuzzy entropy principle.[J].IEEE transactions on image processing:a publication of the IEEE Signal Processing Society,1999,9(4):732-735.
[7]Ye J,Gao T,Zhang J.Moving object detection with background subtraction and shadow removal[C].IEEE,2012.
[8]裴繼紅,謝維信.勢函數聚類自適應多閾值圖像分割[J].1999.
[9]Wu M,Lin C,Chang C.Brain tumor detection using color-based k-means clustering segmentation[C].IEEE,2007.