北斗衛星導航(區域)系統星座對中國載人航天器的服務能力仿真分析
2014-11-20 08:42:46趙思浩
載人航天 2014年2期
關鍵詞:區域
趙思浩,郭 佩,張 偉
(1.中國空間技術研究院載人航天總體部,北京100094;2.清華大學電子工程系,北京100084)
1 引言
全球導航衛星系統(Global Navigation Satellite System,GNSS)在任意氣象條件下可以提供覆蓋全球的實時、連續、高精度的位置和時間信息[1]2-3,也是載人航天器重要的導航定位手段[2]。國際空間站、航天飛機等載人航天器使用全球定位系統(GPS)進行自身位置測量[3,4];日本、歐洲等國家使用GPS作為載人航天器交會對接絕對定位和相對測量的手段之一[5];我國載人航天器也配置了 GNSS 設備[6,7]。
我國自主研發的北斗導航系統目前正在運行和進一步部署當中,從國家戰略安全和自主知識產權角度考慮,我國載人航天器無疑需要使用北斗導航系統作為自主定位的手段。但根據計劃,2020年前北斗(區域)系統只具備中國和部分周邊地區的服務能力[8],為了在未來北斗系統形成全球服務能力時迅速將其應用于載人航天,需要研究當前階段北斗區域系統服務于載人航天器的能力。為此,本文建立了當前北斗區域系統的星座仿真環境,利用我國長期在軌運行的天宮一號的軌道參數,對載人航天器軌道處的北斗星座覆蓋特性進行了仿真分析,并與美國GPS和俄國全球衛星導航系統(Global Navigation Satellite System,GLONASS)在相同場景下的特性進行比對。仿真結果表明北斗衛星導航(區域)系統在載人航天器軌道處具有短時連續服務能力,可以在一定的持續時間段內提供絕對和相對定位服務。
2 北斗系統的星座
北斗衛星導航系統由空間星座、地面控制和用戶終端三大部分組成。空間星座部分由5顆地球靜止軌道(Geostationary Earth Orbit,GEO)衛星和30顆非地球靜止軌道(Non-GEO)衛星組成。GEO 衛星分別定點于東經 58.75°、80°、110.5°、140°和160°。Non-GEO衛星由27顆中圓地球軌道(Medium Earth Orbit,MEO)衛星和3顆傾斜地球同步軌道(Inclined Geosynchronous Satellite Orbit,IGSO)衛星組成。其中,MEO衛星軌道高度21 500 km,軌道傾角55°,均勻分布在3個軌道面上;IGSO衛星軌道高度36 000 km,均勻分布在3個傾斜同步軌道面上,軌道傾角55°,3顆IGSO衛星星下點軌跡重合,交叉點經度為東經118°,相位差 120°[9]。
當前的北斗系統提供區域服務[8,10],區域星座由5顆GEO衛星、5顆IGSO衛星和4顆MEO衛星組成。GEO衛星的軌道高度為35 786 km,分別定點于東經 58.75°、80°、110.5°、140°和160°。IGSO衛星的軌道高度為35 786 km,軌道傾角為55°,分布在三個軌道面內,升交點赤經分別相差120°,其中三顆衛星的星下點軌跡重合,交叉點經度為東經118°,其余兩顆衛星星下點軌跡重合,交叉點經度為東經95°。MEO衛星軌道高度為21 528 km,軌道傾角為55°,回歸周期為7天13圈,相位從Walker 24/3/1星座中選擇,第一軌道面升交點赤經為0°。四顆MEO衛星位于第一軌道面7、8相位、第二軌道面3、4相位,示意圖如圖1 所示[11]。
導航星座于2012年底組網運行。其覆蓋能力能夠服務于中國及周邊大部分地區[10],如圖2所示。據計劃,至2020年,建成由5GEO+3IGSO+27MEO 的全球導航系統[8,10]。
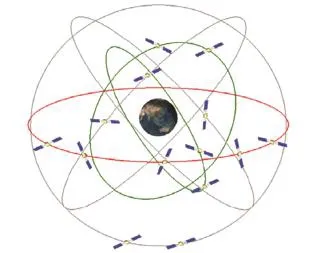
圖1 北斗衛星導航(區域)系統星座示意圖[11]Fig.1 BeiDou navigation satellite(regional)system constellation
3 北斗星座對載人航天器的覆蓋能力仿真
載人航天任務軌道范圍跨越全球所有經度區域[12,13],為具備連續的導航定位能力,需要使用具備全球服務能力的衛星定位系統。覆蓋范圍是一個導航星座是否具備全球服務能力的重要特性[14]。GPS、GLONASS是當前具備全球覆蓋能力的兩個導航星座,在航天領域包括載人航天器應用方面占據主導地位[3,4,15]。我國的北斗系統目前只具備區域服務能力,隨著工程的進展,北斗也在向著全球系統的方向發展[10]。
根據公布的北斗GEO標稱定點位置[9]和國外網站發布的對北斗區域星座在軌IGSO的觀測結果(2014年3月1日觀測星歷)[16],在仿真軟件[17]中構建當前的北斗星座(4GEO+5IGSO+4MEO)如圖3所示。
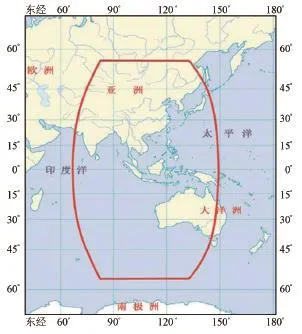
圖2 北斗系統服務區示意圖[1111]Fig.2 BeiDou navigation satellite(regional)system service area
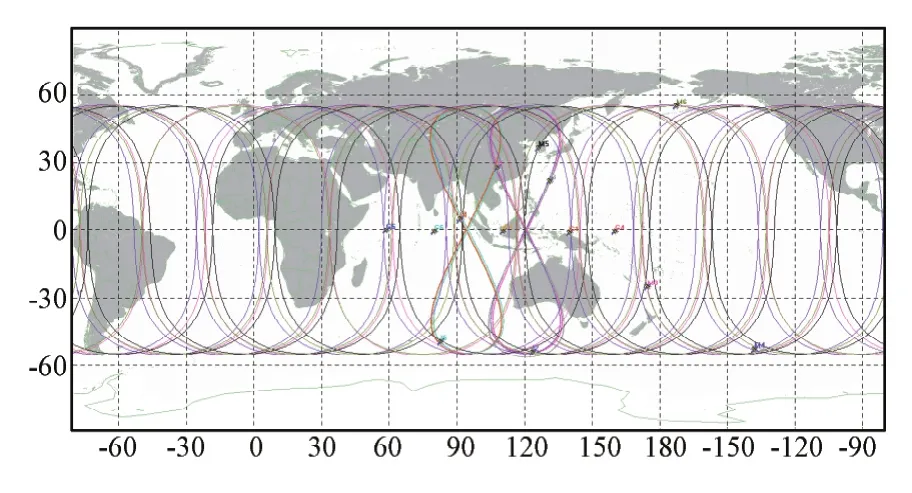
圖3 北斗衛星導航(區域)系統星座仿真場景Fig.3 Simulation scenario of BeiDou Navigation Satellite(regional)System constellation
為考察北斗星座在我國載人航天軌道處的服務能力,使用天宮一號軌道參數[12]進行仿真,其星下點軌跡如圖4所示。用戶可見的導航星數量越多且數量多的時間越長表明星座對用戶的覆蓋越好,即服務能力越強;用戶可見的導航星位置精度因子(DOP)越小且數值小的時間越長同樣可以表征良好的星座服務能力[11]248-257。因此,對可見星數、位置精度因子等參數進行考察。將載人航天器北斗導航接收天線模型化為圓錐視場,導航衛星進入該視場時接收天線可以收到信號。仿真條件如表1所示。

圖4 天宮一號星下點軌跡Fig.4 Ground track of Tiangong-1 spacecraft
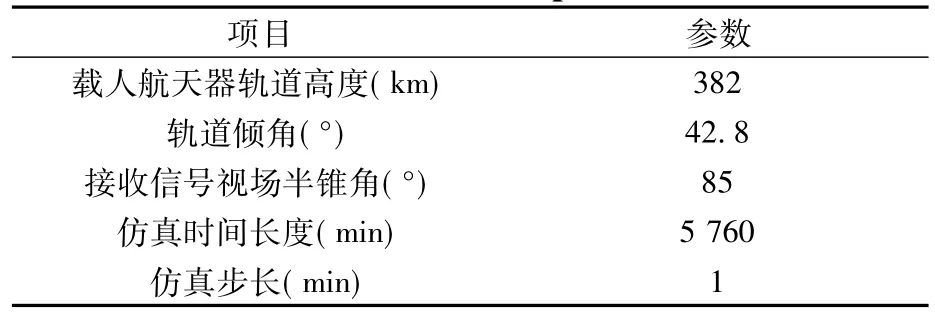
表1 仿真參數設置Table 1 Simulation parameters
在載人航天器軌道處的北斗可見星數仿真結果如圖3、表2第一列所示。其中,無法收到北斗信號的區域占10.0%(圖3中可見星數為0的時段),以載人航天器軌道周期92 min計算,則平均每圈完全無法收到北斗信號的時間約9.2 min。
作為對比,利用 GPS和 GLONASS星座參數[18,19]分別建立兩個星座的仿真場景,給出在相同軌道處的仿真結果,如表2后兩列所示。可見,與GPS和GLONASS相比,北斗系統的可見星絕對數量和相同可見數量條件下的時間比例仍有很大差距。
位置精度因子(PDOP)仿真結果如圖6所示(星座信號完全無法覆蓋的區域PDOP設置為1000,圖中不再顯示)。
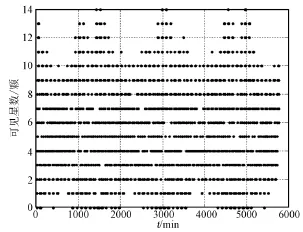
圖5 北斗可見星數隨時間變化情況Fig.5 Number of visible BeiDou satellites vs time
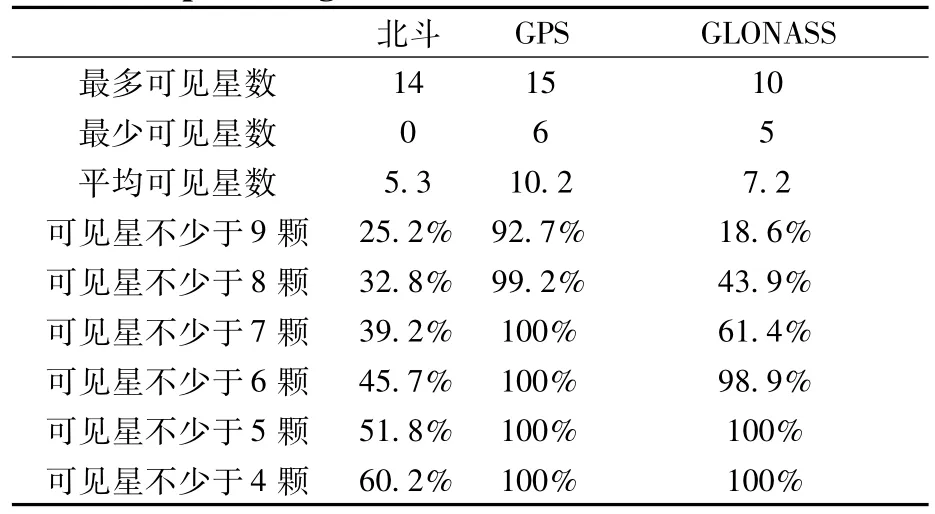
表2 北斗可見星數量和時間比例統計結果Table 2 Number of visible BeiDou satellites and time percentage
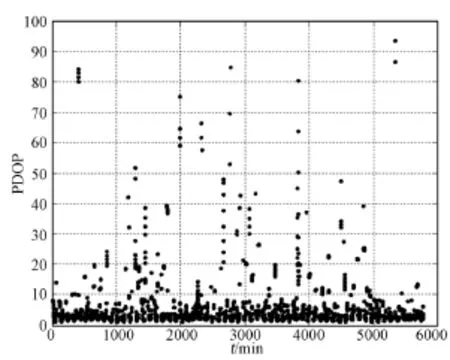
圖6 PDOP隨時間的變化Fig.6 PDOP vs time
在全部載人航天軌道區域和其中的北斗衛星可見區域統計PDOP在不同取值范圍內的時間比例,如表3所示。
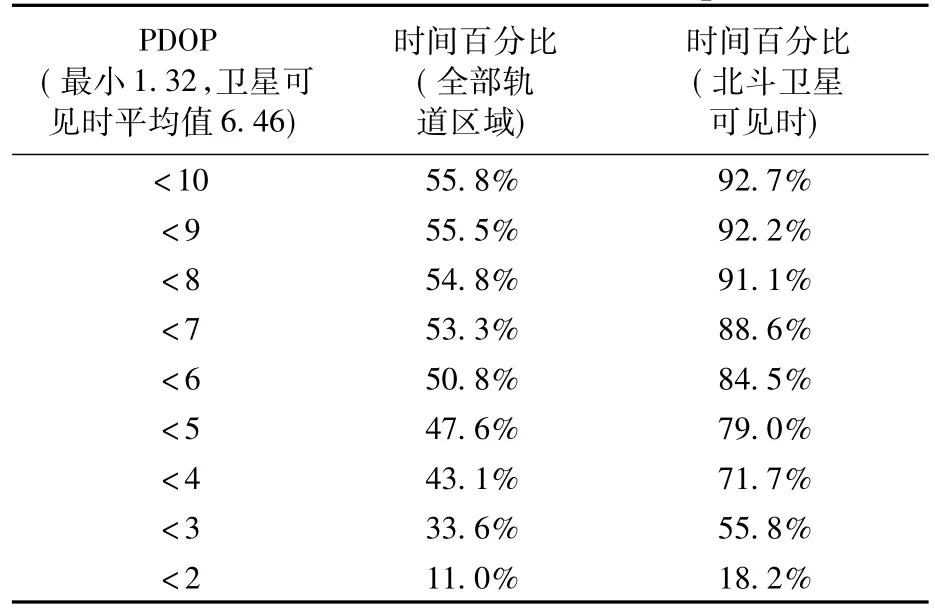
表3 載人航天軌道處PDOP統計結果Table 3 PDOP statistics on manned space orbit
作為對比,將GPS和GLONASS在相同軌道處的仿真結果一并列出,如表4、表5所示。可見,與GPS和GLONASS相比,由于星座衛星數量有限,北斗系統的位置精度因子較大,且小精度因子占據的時間比例較小,對載人航天軌道的覆蓋能力仍有較大差距。
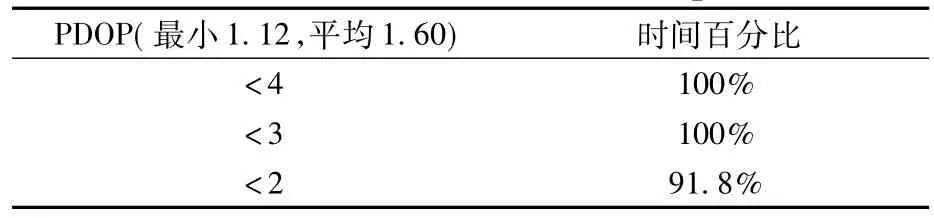
表4 GPS在載人航天軌道的PDOPTable 4 PDOP of GPS on manned space orbit

表5 GLONASS在載人航天軌道的PDOPTable 5 PDOP of GLONASS on manned space orbit
用戶定位誤差可以近似使用距離測量誤差與PDOP乘積進行估算[11]327-328,若北斗導航信號的距離測量誤差不大于5 m,PDOP小于4的區域可以達到約20 m的絕對位置精度,以載人航天器軌道周期92 min計,從表3的統計結果可以估算在載人航天軌道處達到20 m定位精度的平均時間約為39 min。
對北斗星座仿真結果進一步分析可知,可見星數不少于7顆且PDOP<4的平均持續時間約為27 min,最長持續時段為43 min,如圖7所示。其中77%的時段持續時間大于20 min,如果在兩艘載人航天器分別配置北斗導航接收機并進行通信,則在以上持續時間段內,可以進行載波整周模糊度求解以得到高精度實時差分定位結果。
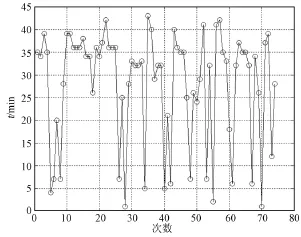
圖7 載人航天軌道處北斗可見星數≥7且PDOP<4的持續時間Fig.7 Duration time(visible BeiDou satellite#≥7 and PDOP<4)for manned space orbit
4 載人航天應用北斗導航系統的初步分析
根據仿真分析結果,北斗衛星導航(區域)系統在載人航天器軌道處有平均連續約39 min具有良好的星座覆蓋特性(PDOP<4),載人航天器上的導航接收機可以在此時段內完成絕對定位功能。如果利用快速捕獲技術[20]在1 min內完成4顆以上衛星導航信號的捕獲從而獲得絕對定位結果,則在每個軌道圈次中,接收機實際可以利用北斗信號完成絕對定位的平均時間約38 min。
如果需要使用兩個接收機完成兩航天器間的高精度相對定位功能,還需具備快速的載波相位整周模糊度解算能力,由于載人航天器軌道高度較低,飛行速度近似為第一宇宙速度,因此在接收機看來,導航星座幾何分布變化很快,可以在較短時間內為載波整周模糊度解算方程提供較多信息量,為快速解算提供了良好條件,如果具備在100 s左右進入載波相位固定解的能力,則每次高精度相對定位可以持續的時間最長約41 min,平均約26 min。由此可見,以北斗系統當前的覆蓋能力,當兩載人航天器距離較近(若干千米)時,可以在較短但持續的時間段內完成高精度相對測量任務。
5 結語
使用載人航天器軌道和北斗星座參數的仿真結果表明,我國載人航天器使用北斗衛星導航(區域)系統,可以獲得平均約38 min的時間完成絕對定位功能;同時可利用最長約41 min,平均約26 min的持續時間段完成高精度相對定位功能。因此,當前北斗衛星導航(區域)系統可以為載人航天器提供部分時段的導航定位服務,支持載人航天器的絕對定位和相對測量任務。
隨著北斗導航星座的不斷完善,在可以預見的未來,北斗導航系統必將在我國載人航天工程中發揮更重要的作用。
[1]Kaplan E D,Hegarty C J.Understanding GPS principles and applications[M].2nd ed.Norwood,MA:Artech House,Inc.,2006.
[2]Fehse W.Automated rendezvous and docking of spacecraft[M].UK:Cambridge University Press,2003:17-18.
[3]Goodman J L.Space shuttle guidance,navigation,and rendezvous knowledge capture reports;revision 1[R],USA:Lyndon B.Johnson Space Center,2011.
[4]Goodman J L.Application of GPS navigation to space flight[C]//Proc.of Aerospace Conference,USA:IEEE,2005:1837-1852.
[5]Chullen C,Blome E,Tetsuya S.H-II Transfer Vehicle(HTV)and the operations concept for extravehicular activity(EVA)hardware[R].USA:NASA,2010.
[6]陳相周,顧側峰,呂大奎.神舟號載人飛船船載測控通信分系統[J].上海航天,2005(5):9-13.
[7]張慶君,余孝昌,左莉華,等.神舟載人飛船測控與通信分系統的研制[J].航天器工程,2004(13):97-103.
[8]中國衛星導航系統管理辦公室.北斗衛星導航系統發展報告[EB/OL].1.0版.2011[2014-03-01].www.beidou.gov.cn.
[9]中國衛星導航系統管理辦公室.北斗衛星導航系統空間信號接口控制文件公開服務信號[EB/OL].2.0版.2013[2014-03-01].www.beidou.gov.cn.
[10]中國衛星導航系統管理辦公室.北斗衛星導航系統發展報告[EB/OL].2.2版.2013[2014-03-01].www.beidou.gov.cn.
[11]中國衛星導航系統管理辦公室.北斗衛星導航系統公開服務性能規范[EB/OL].1.0版.2013[2014-03-01].www.beidou.gov.cn.
[12]周建平.天宮一號/神舟八號交會對接任務總體評述[J].載人航天,2012,18(1):1-8.
[13]周建平.載人航天交會對接技術[J].載人航天,2011,(2):1-8.
[14]Misra P,Enge P.Global Position System,Signals,Measurements,and Performance[M].羅鳴,曹沖,肖雄兵,等(譯).第二版.北京:電子工業出版社2008:99-100.
[15]Branets V,Mikhailov M,Stishov Y,et al.“Soyuz”-“Mir”orbital flight GPS/GLONASS experiment[C]//Proc.of ION GPS 1999,USA:Institute of Navigation,1999:2303-2312.
[16]N2YO.com.Real time satellite tracking and predictions[EB/OL].[2014-03-01].www.n2yo.com.
[17]楊穎,王琦.STK在計算機仿真中的應用[M].北京:國防工業出版社,2005:36-51.
[18]Global Positioning Systems Directorate.Navstar GPS space segment/navigation user interfaces(IS-GPS-200G) [EB/OL].2013[2014-03-01].www.gps.gov.
[19]Information-analytical centre. GLONASS ephemeris[EB/OL].[2014-03-01].glonass-iac.ru.
[20]謝鋼.GPS原理與接收機設計[M].北京:電子工業出版社,2009:370-374.
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15
