基于狀態觀測器的LCL 濾波器型并網逆變器狀態反饋最優化設計
2014-11-25 09:28:54姚文熙杭麗君呂征宇
電工技術學報 2014年6期
關鍵詞:系統
李 賓 姚文熙 杭麗君 呂征宇
(浙江大學電力電子國家專業實驗室 杭州 310027)
1 引言
當今社會,化石燃料燃燒造成的環境污染以及非可再生資源的不斷消耗所帶來的能源危機,使得可再生能源的開發變得非常重要。風能、地熱能、燃料電池以及太陽能等新能源不斷興起,并在分布式發電(Distributed Generation,DG)中占據越來越多的份額[1-3]。
這些新能源都要通過并網逆變器來向電網饋能。并網逆變器一般采用脈沖寬度調制(Pulse Width Modulation,PWM)下的電流型控制,因此會有很多含有高頻諧波的電流進入電網,影響電網質量。為了濾除高頻電流,通常要在逆變器與電網之間加入電感。相對于傳統的L 型濾波器,LCL 濾波器通過電容支路提供高頻旁路從而顯著衰減流入電網電流的高頻分量,因此被廣泛使用于大功率設備[4-6]。但由于LCL 本身存在諧振,在實際的控制過程中需要阻尼來抑制其諧振。傳統的阻尼方法一般是在電感或電容上串聯電阻(Passive Damping,DP)[7,8]。但是這種方法不僅增大了系統的損耗,還削弱了LCL濾波器的性能[8]。為了解決這一問題,許多學者提出通過不同的控制方式進行有源阻尼(Active Damping,AD)[8-17]。文獻[9-12]分別利用電容電壓和電容電流反饋進行阻尼;文獻[13]則提出了一種基于虛擬電阻(virtual resistor)的解決方案。但是這三種方法都要增加傳感器的數量,增加了系統成本。文獻[8]通過加入A-D 模塊來改善系統的性能;文獻[14,15]則提出了一種分裂電容的方法,通過采集兩個電容之間的電流進行阻尼。雖然這兩種方法在不增加系統成本的前提下達到了阻尼LCL 諧振的效果,但對于系統的動態響應卻沒有明確的改善,而且對LCL 參數要求很高。相對于前述幾種使用傳統伯德圖理論的分析,極點配置理論[18]能夠更好的解釋系統的動態性能,因此一種基于狀態空間的極點配置方法被提了出來[16,17],這種方法通過配置閉環極點的位置來改善系統的動態響應和穩態波形,取得了不錯的效果。觀測器[18]能夠通過系統中可測量的值得到系統中不可測量的值,因此觀測器的采用可以有效減少傳感器的數量。文獻[19-21]設計了基于LCL 型并網逆變器的觀測器,但并沒有說明閉環極點位置對觀測器極點配置的影響以及觀測量反饋的穩定性,同時也沒有驗證系統的動態響應。而且文獻[21]沒有考慮到系統延時以及濾波器參數對系統極點的影響,對系統動態性能的改善也沒有在零極點圖上進行討論。
本文在建立系統離散狀態空間模型的基礎上引入了狀態變量反饋,并利用閉環極點配置的方法[17]使整個系統達到最好的動態性能。同時設計了改進型觀測器,在零極點圖[16]上說明了閉環系統極點對觀測器極點配置的影響,并通過計算推出了其限制范圍。本文還討論了LCL 參數對閉環系統極點以及狀態反饋極點的影響,證明了這種使用狀態觀測器的狀態反饋方法的魯棒性。最后在一臺10kW 的樣機上驗證了本文所設計的狀態變量反饋以及觀測器設計方法的有效性。
2 并網逆變器結構及離散狀態空間模型
2.1 主電路拓撲
圖1 所示為本文研究的基于LCL 濾波器的并網逆變器的主電路拓撲。其中Udc為直流側電壓,VT1~VT66 個IGBT 開關管組成三相半橋結構。Lg、Ls和C組成LCL 濾波器。其中Rg、Rs和Rc分別表示網側電感、逆變器側電感以及電容的等效串聯電阻。
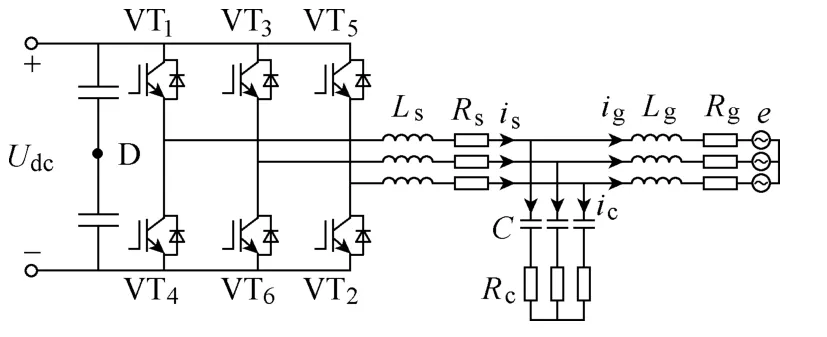
圖1 基于LCL 濾波器的三相并網逆變器拓撲Fig.1 Topology of three phase grid-connected inverter with LCL-filter
2.2 傳統的并網逆變器控制方式
加入狀態變量反饋后的控制方式如圖2 所示,主要包括兩相旋轉坐標系下的電流環控制以及之后的狀態變量反饋。圖中ssfbα和ssfbβ分別代表α 軸和β 軸的狀態反饋。相對于傳統的配置方法,這種反饋方式對系統的控制效果更好,能夠很好地改善系統的動態響應。
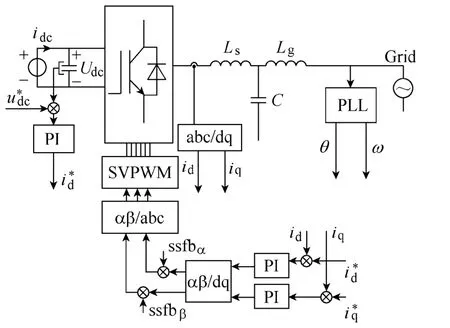
圖2 并網逆變器控制策略Fig.2 Control strategy of three phase grid-connected inverter with LCL-filter
2.3 改進型離散狀態空間模型
為了建立系統的狀態空間方程,假設圖1 中三相電網是平衡的,根據基爾霍夫電流電壓定律,可以得到LCL 濾波器部分的微分方程,再通過Clarke變換,可以消除三相中的共模分量,得到兩相靜止坐標系下的微分方程[16]。
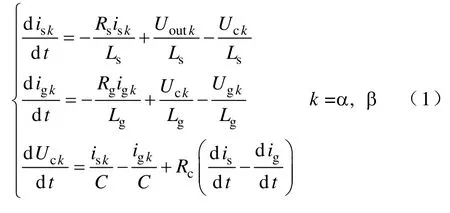
式中,isk和igk分別表示逆變器側和網側電流;Uoutk、Uck和Ugk分別表示逆變器輸出、電容和電網電壓。
由該微分方程可以得到并網逆變器LCL 濾波器部分的狀態空間方程
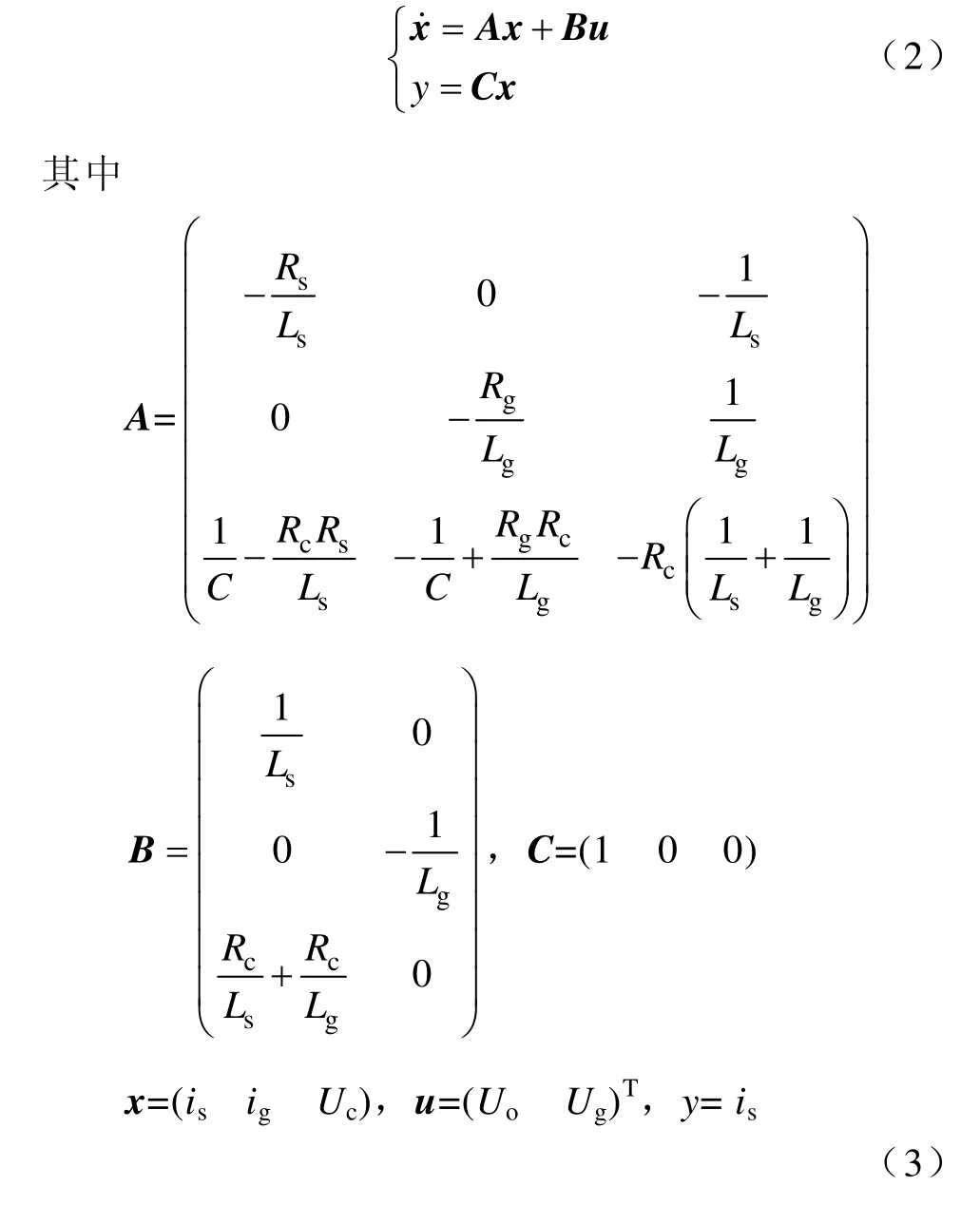
因為并網逆變器采用離散數字控制,因此需要推導出LCL 濾波器部分的離散狀態空間方程。根據連續狀態空間方程和離散狀態空間方程的關系,可以推出
其中
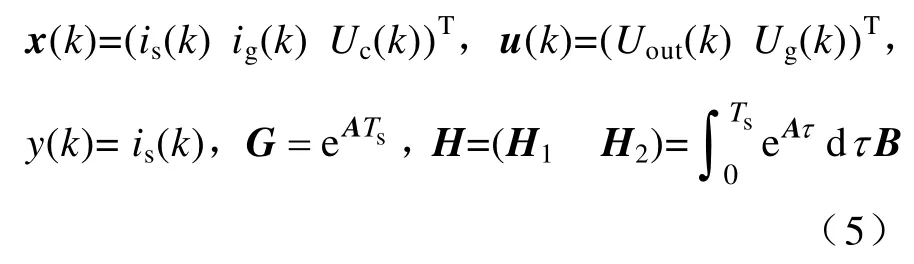
式中,Ts為離散周期。
此時系統的狀態空間框圖如圖3 所示。
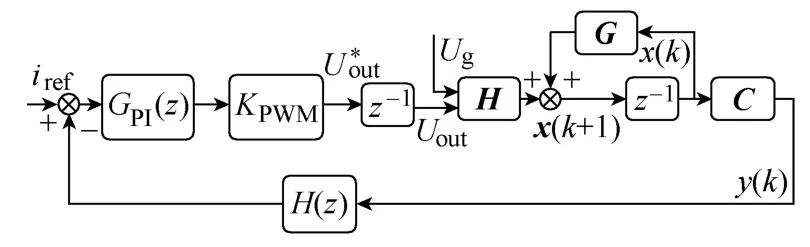
圖3 系統離散狀態空間模型框圖Fig.3 Block diagram of discrete state space model
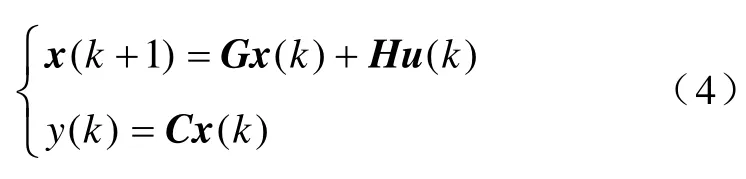
在實際系統中還需要考慮數字控制帶來的延時。因此,需要將式(4)表示的離散狀態空間方程進行改進。假設控制系統的延時為一個控制周期,則

由式(6)可以將逆變器的離散狀態空間方程改進為
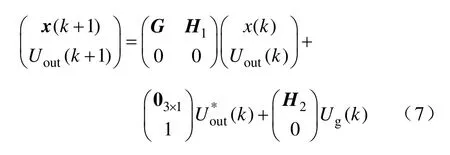
如果定義新的一組矩陣,則加入延時后系統的離散狀態空間方程可以表示為

根據式(8),可以畫出逆變器控制框圖,如圖4 所示。
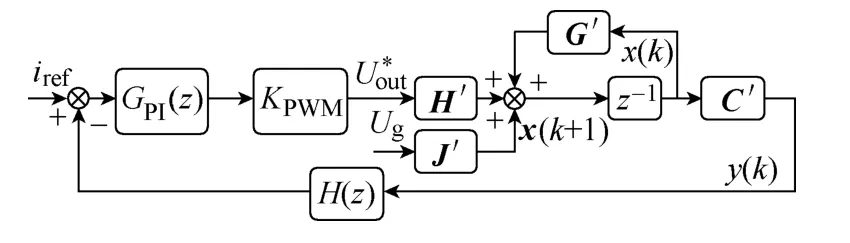
圖4 改進的逆變器離散狀態空間模型控制框圖Fig.4 Block diagram of improved discrete state space model
3 狀態變量反饋和改進型觀測器的建立
3.1 狀態變量反饋
在文獻[22]中,已經將式(8)所表示的離散狀態空間可控的充分條件歸納為
式中,fs為離散頻率。
如果系統的延時與LCL 參數滿足式(9),則該離散狀態空間系統一定可控。這樣就可以以上一小節建立的改進型離散狀態空間為基礎進行系統的狀態變量反饋設計。加入狀態變量反饋后系統控制框圖如圖5 所示,系統的狀態空間表達式為


圖5 加入狀態變量反饋的離散狀態空間模型框圖Fig.5 Block diagram of discrete state space model with state variable feedback
其中,反饋矩陣定義為


結合之前的電流環PI 調節器以及PWM 放大模塊,最終可以得到系統的傳遞開環函數為

式中,GPI(z) 表示離散PI 調節器,KPWM表示PWM模塊的增益。

系統的閉環傳遞函數可以表示為

最終得到的開環離散傳遞函數和閉環系統離散傳遞函數見式(16)和式(17),其中a0~a3是與矩陣G′、H′和Kc有關的量,而b0~b2則只和矩陣G′以及H′有關;kp和ki為PI 調節器參數。
從系統的閉環傳遞函數可以看出該閉環系統零極點的特性。
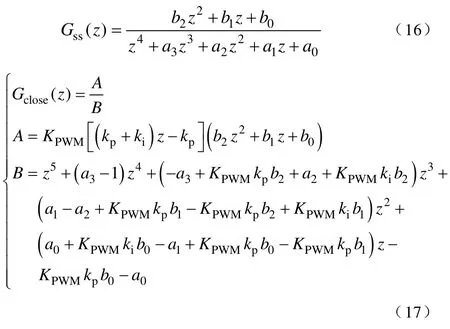
(1)這是一個五階系統,有5 個極點和3 個零點。
(2)3 個零點中,一個零點的位置由PI 調節器參數確定,另兩個零點的位置只與LCL 參數有關。
(3)5 個極點的分布與狀態反饋矩陣以及PI 調節器參數有關。
(4)系統的可控參數有6 個,包括PI 調節器中的2 個參數以及狀態反饋矩陣中的4 個參數。系統可調的零極點數也有6 個,包括一個零點和5 個極點。
因此,該閉環系統中的5 個極點和1 個零點完全可以通過改變狀態反饋矩陣以及PI 調節器的參數來自由配置。同時另外兩個零點不可改變。
3.2 改進型觀測器設計
通過上述建立的改進型離散狀態空間方程,可以建立Luenberger 觀測器。
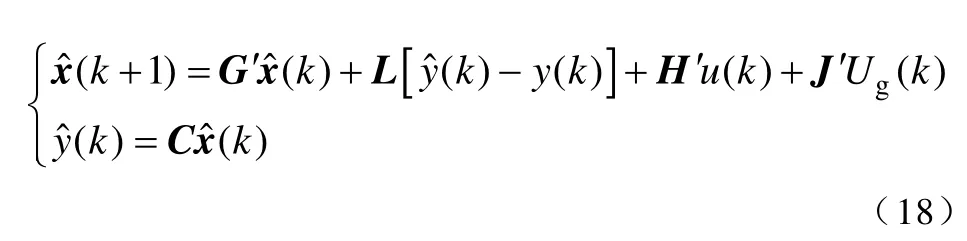
由式(18)可以得到系統的誤差方程為

式中,L是觀測器的反饋矩陣,用來讓觀測值更快收斂到實際值。觀測器的收斂速度取決于矩陣'+G LC。
如果考慮到系統的狀態變量反饋,則觀測器方程應該變為
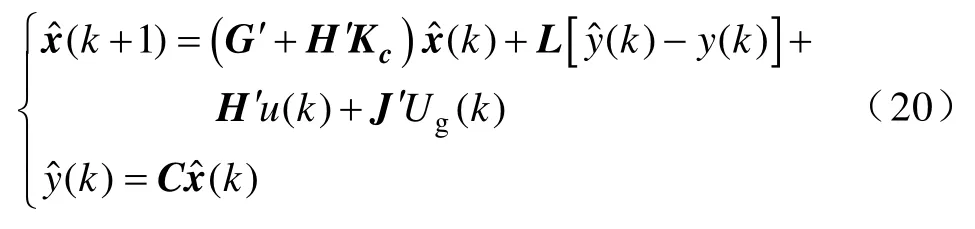
此時系統的結構框圖如圖6 所示。
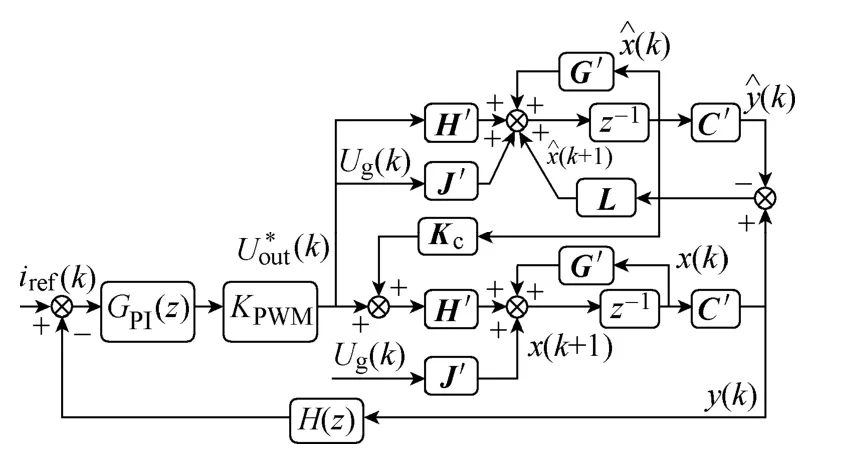
圖6 加入狀態觀測器后系統的結構框圖Fig.6 Block diagram of state space with improved state observer
狀態觀測器觀測值的收斂速度取決于矩陣G′+H′Kc+LC。同時根據分離原則,反饋矩陣Kc以及L的配置互不影響。這對于系統的極點配置以及觀測器的設計是非常有利的。
觀測器的輸入量是逆變器側電流、網側電壓以及逆變器輸出電壓給定。因此這種觀測器只需要一個逆變器側電流傳感器和一個網側電壓傳感器,與傳統的逆變器相同,不會增加系統的成本。
4 系統及改進型觀測器極點配置
相比于傳統的伯德圖理論,極點配置理論更好地反映了系統的動態特性。本節就根據極點配置理論,通過配置整個系統的閉環極點來改善系統的動態特性。但由于狀態變量是通過觀測器得到的,因此還需要考慮到系統在引入狀態觀測量反饋后的穩定性。
4.1 閉環系統極點配置
上一小節已經介紹了閉環系統的零極點特性。根據極點配置理論,主導極點的阻尼設置在0.707時系統的動態效果最好。同時非主導極點對系統的作用應該盡可能小,在s平面上表示就是盡可能遠離虛軸。因此,可以將系統的零極點進行如下的配置(z平面):
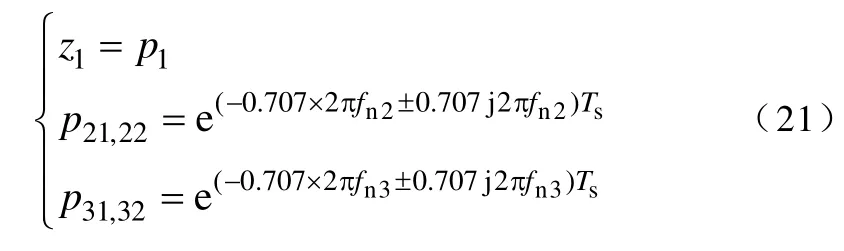
式中,fn2和fn3分別是第二對和第三對極點的振蕩頻率,且有fn2?fn3。
4.2 觀測器極點配置
上一小節介紹的觀測器是基于狀態反饋部分的模型建立的,因此觀測器的極點配置要基于狀態反饋部分的極點,而不是整個系統的極點。
觀測器的收斂速度一般都要比所觀測的系統快,因此在s域中,觀測器極點的實部一般是系統極點實部的1.5~2 倍,而虛部可以保持不變。在z域中,這一關系可以表示為

式中,上標ss 表示該極點是狀態反饋部分的極點。
4.3 觀測值反饋穩定性分析
實際上,當系統閉環極點的振蕩頻率到達一定范圍以外時,狀態反饋部分將處于不穩定狀態(極點位于單位圓之外)。雖然從整個閉環傳遞函數來看系統是穩定的,但觀測器只是基于狀態反饋部分,因此后者的不穩定會對前者造成較大影響,特別是狀態觀測值還要反饋到系統中進行控制。為了保證狀態觀測值反饋之后系統的穩定性以及魯棒性,有必要將狀態反饋部分的極點限制在單位圓內,討論系統閉環極點與狀態反饋部分極點的關系,找到能夠實現的最佳閉環系統極點配置,即在系統穩定的前提下應該盡量提高系統的響應速度,
假設狀態反饋部分的離散傳遞函數為

則系統的閉環傳遞函數可以表示為
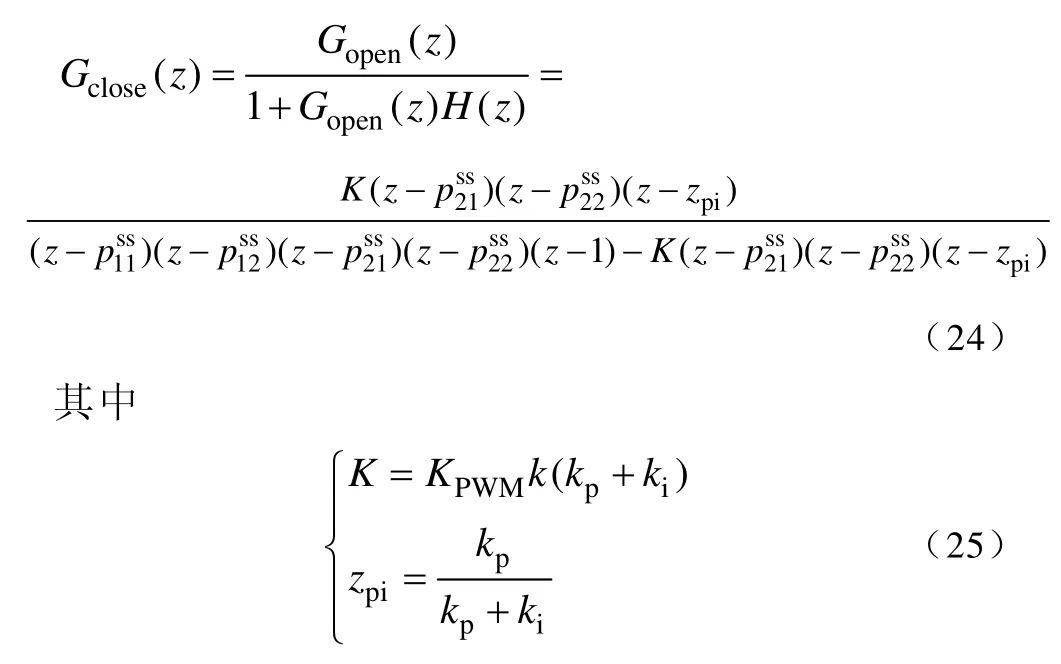
假設經過極點配置的系統閉環傳遞函數為
對比式(24)和式(26),再考慮到式(21)中第一個零極點的配置,不難得到
再將式(24)和式(26)的分母對應起來,即可解出狀態反饋部分的極點
如果將式(21)的第二和第三對極點配置代入式(28),則式(28)可以化簡為
為了使狀態反饋部分的極點都落在單位圓內,要求

因為零點z21和z22只與系統的LCL 濾波器參數有關,當LCL 確定時z21和z22都是常數,所以狀態反饋部分的極點實際上只與閉環系統極點的振蕩角頻率有關,將其關系的三維圖畫出如圖7 所示。
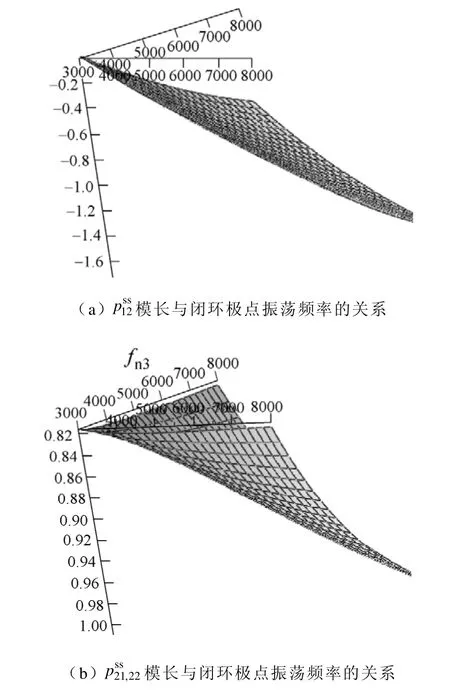
圖7 狀態反饋部分極點與閉環極點振蕩頻率的關系(z 軸位為極點到原點的模長,x、y 軸為振蕩頻率)Fig.7 Relationship of state space poles and the frequencies of closed-loop poles (z-axis represents the distance between poles and the original point.x,y-axis represent the frequencies of closed-loop poles respectively)
由圖7 可以看出狀態反饋部分極點的位置與閉環極點振蕩頻率的關系:當閉環極點振蕩頻率增大時,狀態反饋部分的極點開始向單位圓外移動。
通過上述分析,可以計算出合理的閉環極點分布。如果LCL 的參數如表所示,數字運算頻率選為30kHz,則系統的零極點可以配置為
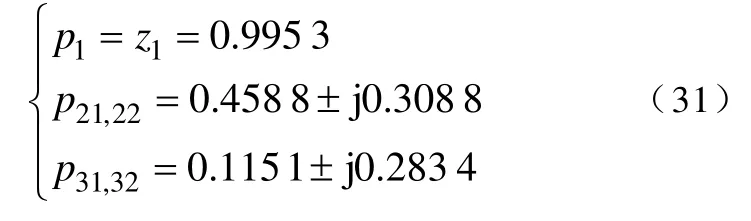
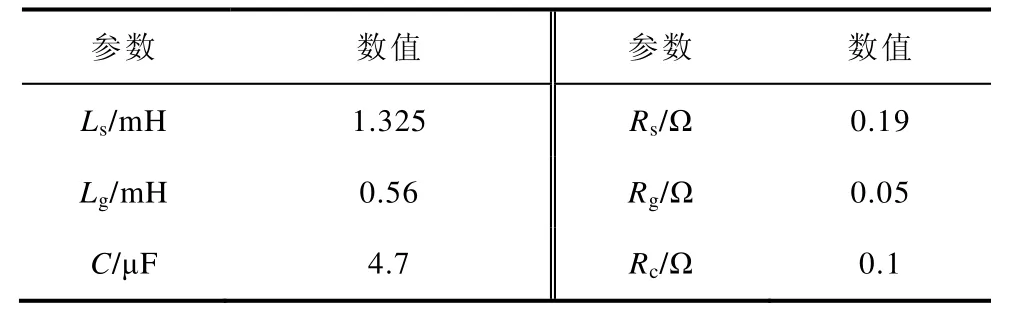
表 LCL 濾波器參數Tab.Parameters of LCL-filter
與加入狀態反饋前系統(保持系統帶寬不變)單位階躍響應的對比如圖8 所示。
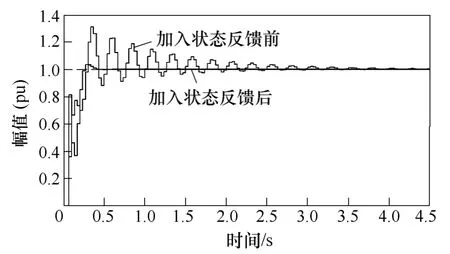
圖8 加入狀態反饋前和加入狀態反饋后系統的階躍響應Fig.8 Step response without and with state variables feedback
加入狀態反饋后和加入狀態反饋前的閉環系統根軌跡如圖9a 中“×”所示,分別用虛線和實線標注。狀態反饋部分的根軌跡則在圖9b 中表示。其中加粗的“○”和“×”表示最終選定的零極點位置。在圖9a 中可以看到經過狀態反饋之后,系統的極點分布更加合理,穩定裕量更大。
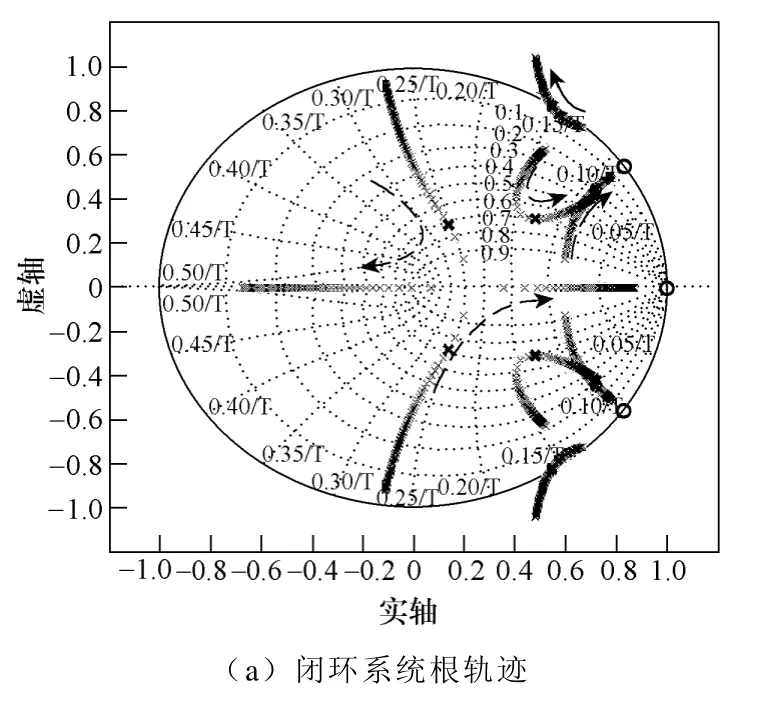
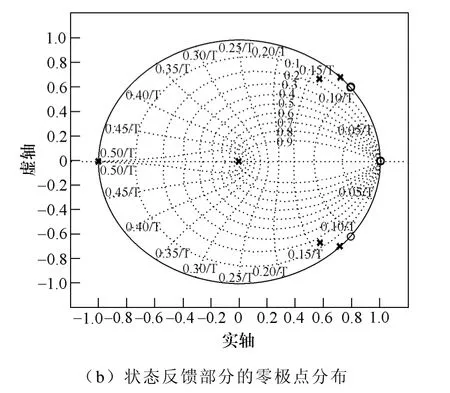
圖9 系統的零極點分布Fig.9 Distribution of poles of the closed-loop system and state space
在選定系統的極點位置之后,只需要將式(15)中的分母與式(26)的分母系數一一對應列寫方程,即可求出反饋矩陣Kc以及PI 調節器參數kp和ki。
確定系統極點之后,狀態反饋部分的極點也隨之確定,通過式(22)可以求出改進型觀測器的極點配置,并得到改進型觀測器反饋矩陣L,因此整個系統的設計步驟可以簡述為:①建立系統的離散空間模型和改進型觀測器模型;②根據LCL 參數進行最優化極點配置,確定狀態反饋矩陣Kc、PI 調節器參數和觀測器反饋矩陣L;③實驗驗證。
5 系統魯棒性分析
5.1 系統參數對閉環極點的影響
在系統的運行中,隨著功率的增大,電感會出現飽和,同時溫度的變化也會導致LCL 參數發生變化,因此有必要分析系統在LCL 參數變化時的穩定性。
5.1.1Ls對系統極點的影響
當Ls從0.65~2mH 變化時,系統的根軌跡如圖10a 所示。Ls對系統的影響較大,當Ls<0.95mH 時系統會不穩定。因此實際設計中逆變器側電感要留有足夠的裕量,且要選擇不易飽和的磁心。
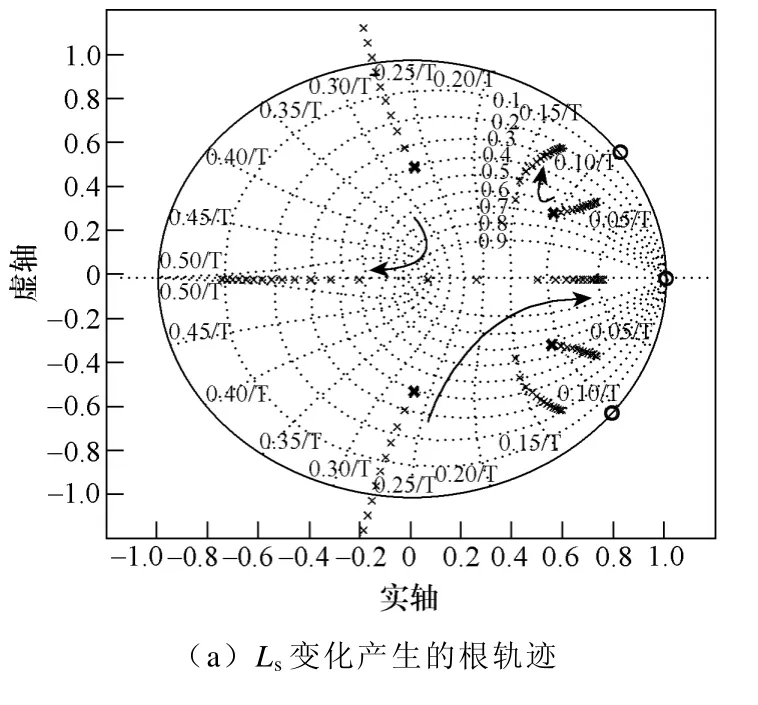
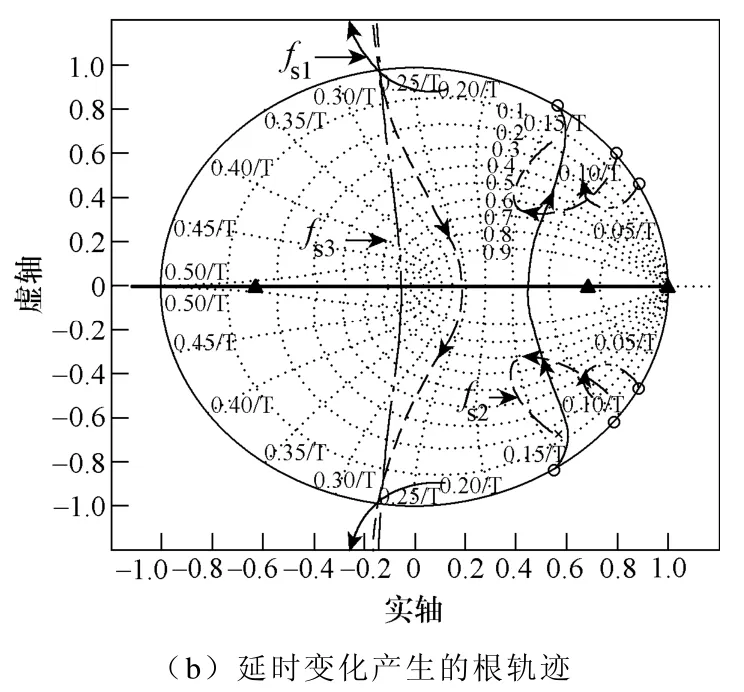
圖10 系統參數變化對閉環極點位置的影響Fig.10 Influence of system parameters on the position of closed-loop poles
5.1.2Lg和C對系統極點的影響
對于Lg和C來說,系統的魯棒性很好,在很大的范圍內均穩定。但是在電容較小時,系統的阻尼不足,會使狀態反饋的效果變差。
5.1.3 延時對系統極點的影響
當計算頻率分別為fs1=20kHz、fs2=30kHz和fs3=40kHz 時,產生的根軌跡如圖10b 所示。當計算延時大于43.5μs(23kHz)時,系統將不穩定。可見延時對系統穩定性的影響也較大。
5.2 系統參數對狀態反饋部分極點的影響
5.2.1Ls對系統極點的影響
當Ls從0.65~2mH 變化時,系統的根軌跡如圖11a 所示。Ls減小反而利于狀態反饋部分的穩定,方便觀測器的設計。
5.2.2Lg和C對系統極點的影響
對于Lg和C來說,狀態反饋部分的魯棒性很好,在很大的范圍內均穩定。
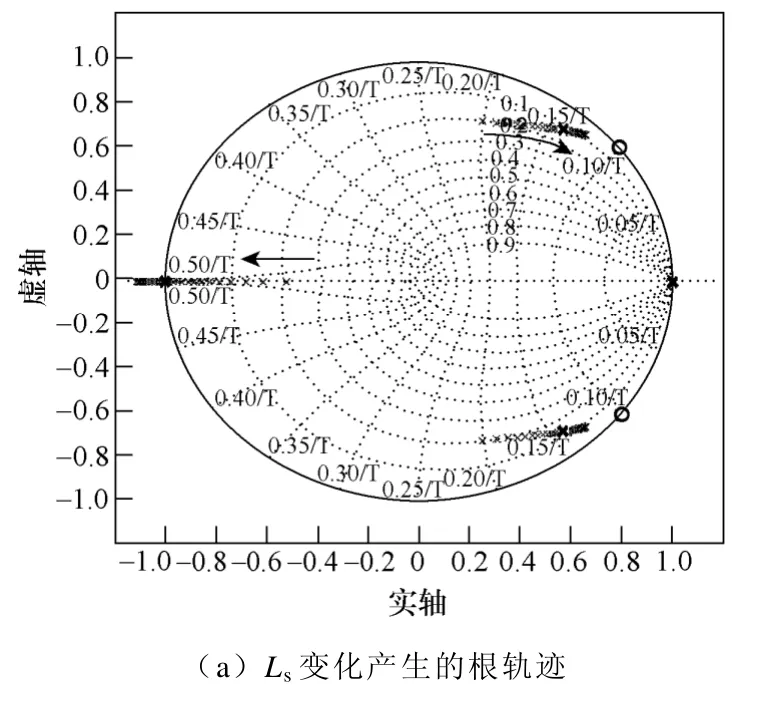
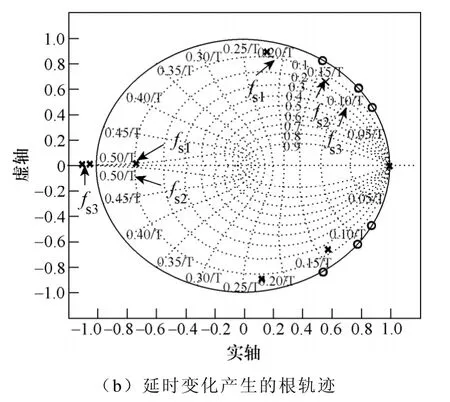
圖11 系統參數變化對狀態反饋部分極點的影響Fig.11 Influence of system parameters on the position of state space poles
5.2.3 延時對系統極點的影響
當計算頻率分別為20kHz、30kHz和40kHz 時,產生的根軌跡如圖11b 所示。當系統延時過小時反而會使狀態反饋部分的極點會落在單位圓之外,此時無法設計狀態觀測器。
通過上述分析可以發現,相對于閉環系統,狀態反饋部分魯棒性更好,這也證明了狀態觀測器的魯棒性——系統參數發生變化時也能保持穩定。
6 實驗驗證
為了驗證上述狀態反饋以及狀態觀測器設計的有效性,根據圖1和圖2 的拓撲以及控制原理,搭建了一個10kW 的基于LCL 濾波器的并網逆變器實驗平臺。LCL 濾波器的參數如前表所示。所有的控制算法,包括直流電壓外環、狀態變量反饋、電流PI 內環以及改進型狀態觀測器都在德州儀器微控制器TMS320F28335 中實現。系統的載波頻率為15kHz,計算頻率為30kHz。采用SVPWM 控制方式。逆變器交流側直接與電網相連,直流母線電壓設定為650V。實驗結果顯示改進型觀測器能夠很好地對系統的狀態變量進行觀測,同時經過狀態反饋,系統的動態性能有顯著的提升,穩態性能也有一定的改善。
觀測器的觀測效果通過數字到模擬轉換(Digital Analog Conversion,DAC)后輸出到示波器進行觀測。圖12a 所示為改進型觀測器的網側電流觀測效果。圖12b 則為電容電壓的觀測效果。圖13是在電流給定從半載突變為1/4 載時觀測器的動態跟蹤效果。
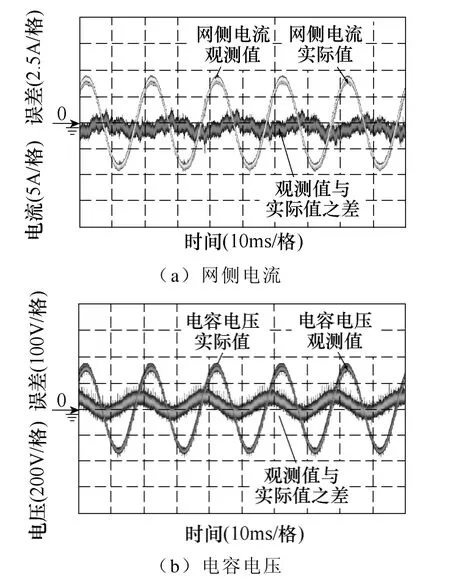
圖12 改進型狀態觀測器穩態觀測效果Fig.12 Steady state performance of the improved state observer
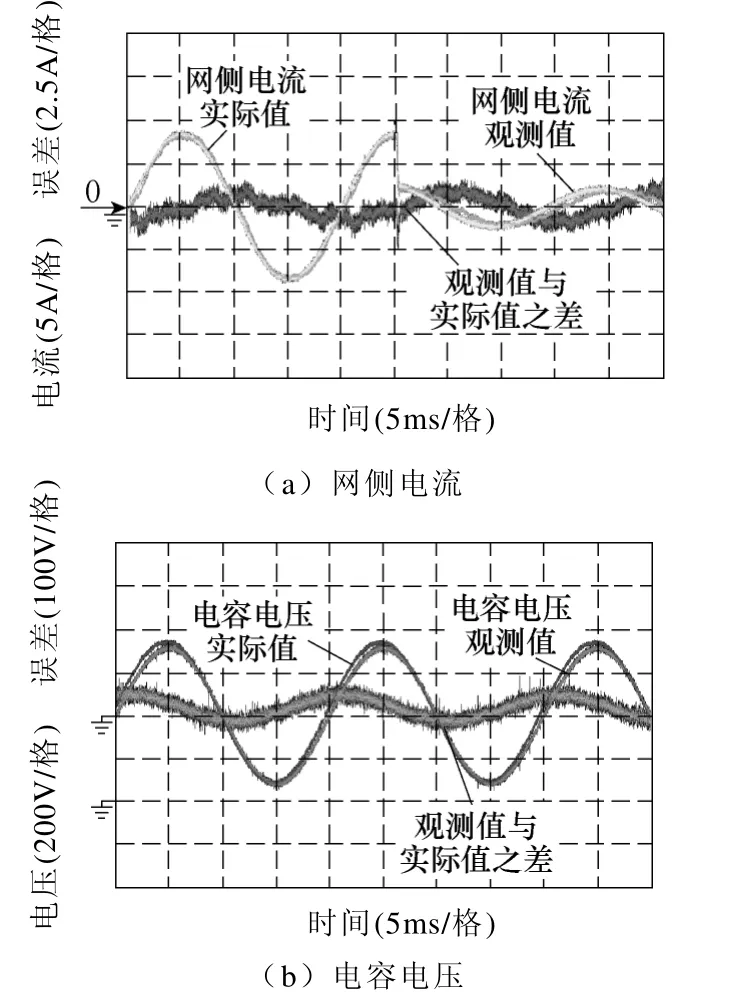
圖13 改進型狀態觀測器動態觀測效果Fig.13 Dynamic performance of the improved state observer
改進型觀測器與傳統觀測器的觀測效果對比如圖14 所示。在相同極點配置下,改進型觀測器在觀測效果上要明顯優于傳統觀測器,網側電流觀測誤差最大值從5A 降到了1.5A。可見系統延時對觀測器影響很大。
將觀測器觀測得到的觀測值用于狀態變量反饋,得到的系統穩態波形圖如圖15 所示。圖16是系統在使用狀態變量反饋后的動態響應。
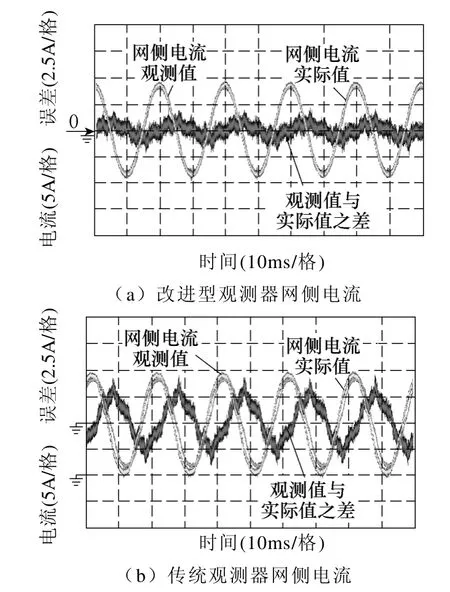
圖14 改進型觀測器與傳統觀測器觀測效果對比Fig.14 Comparison between improved state observer and traditional state observer
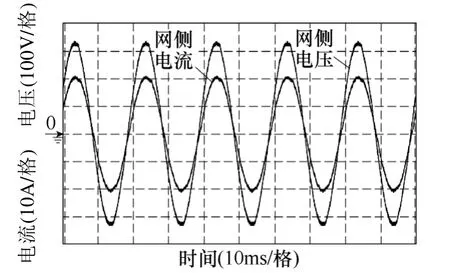
圖15 加入狀態變量反饋后網側電壓和電流穩態波形Fig.15 Steady state performance of grid voltage and current with state variable feedback
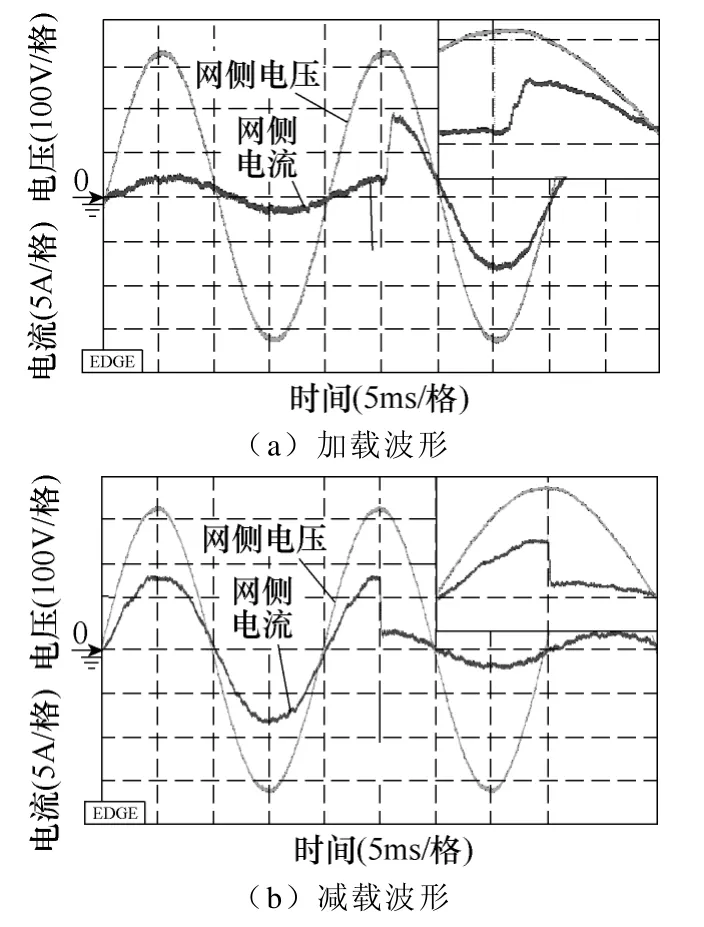
圖16 加入狀態反饋后網側電壓電流的動態響應波形Fig.16 Dynamic performance of grid voltage and current with state variable feedback
圖17 所示為不加狀態反饋時的動態響應波形。如果與不加狀態反饋的系統進行比較可以發現,在加入狀態反饋之后,系統的動態性能得到了極大的改善。在減載時,電流超調量明顯減少,同時系統很快進入穩態,而幾乎不產生任何振蕩,調整時間減小。而在加載時則沒有任何振蕩。再比較d 軸電流的動態波形,如圖18 所示。
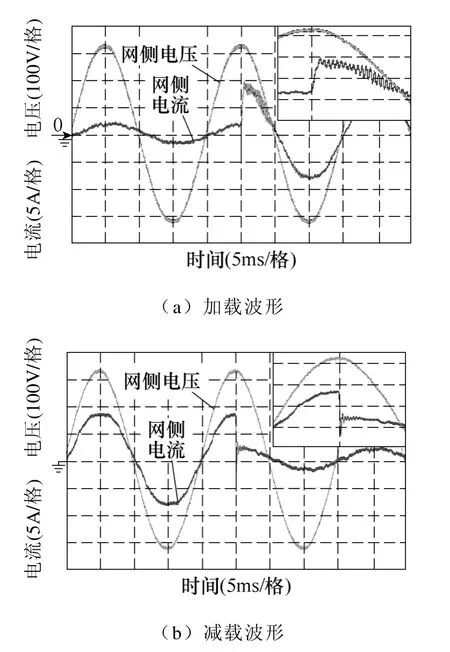
圖17 不加狀態反饋時網側電壓電流的動態響應波形Fig.17 Dynamic performance of grid voltage and current without state variable feedback
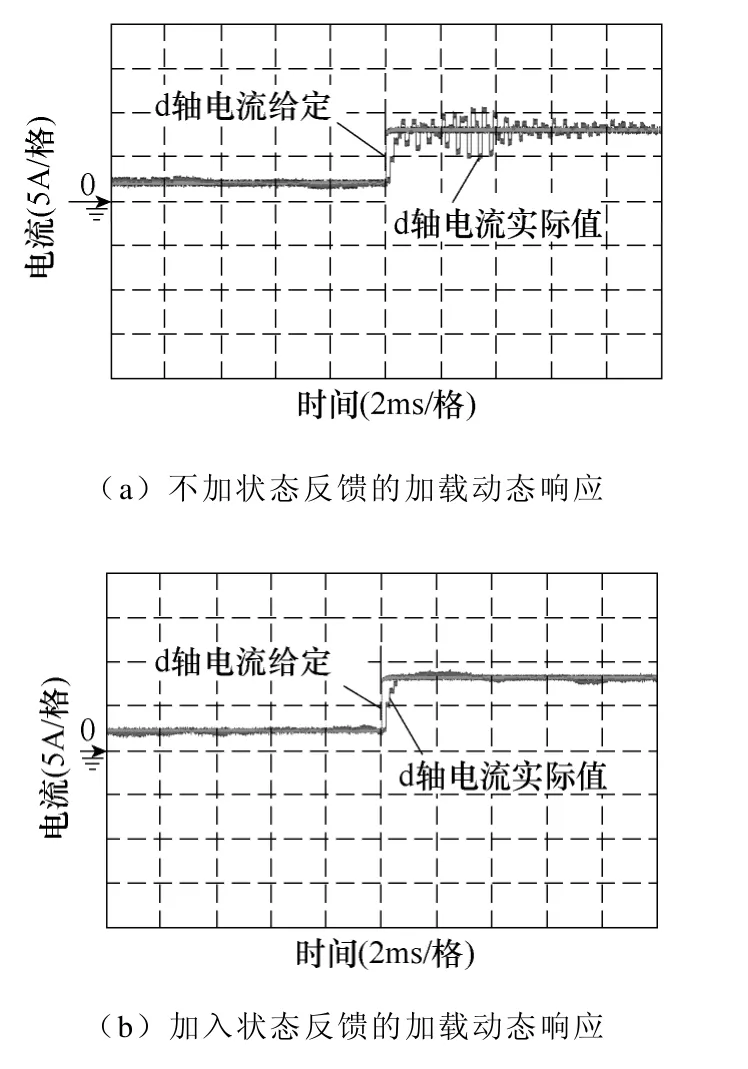
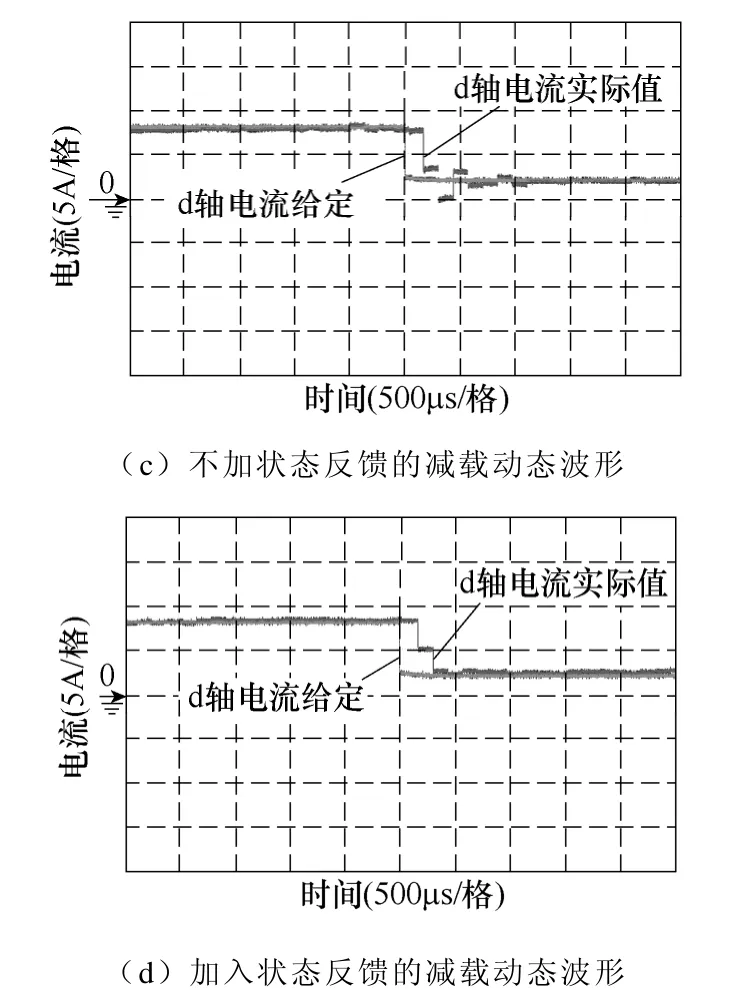
圖18 d 軸電流階躍響應對比Fig.18 Comparison of the current step response under d axis
由于DAC 的傳輸速率有限,圖中觀測值呈現階梯狀,但結果仍能夠說明問題。
經過分析得到,在加入狀態反饋之前,d 軸電流分量從半載到1/4 載的調整時間為1ms,超調量為2A。此時系統帶寬已經接近臨界穩定,1/4 載到半載時有可能產生振蕩(見圖17a),且滿載時不穩定(電流增大造成電感值減小);而在加入狀態反饋之后并網電流的調整時間降低為300μs,超調量則接近零,且滿載工作也非常穩定。
將PI 參數調節到全負載范圍穩定,對比狀態反饋方法和普通PI 調節方法的穩態波形,可以得到如圖19 所示的THD 分布。
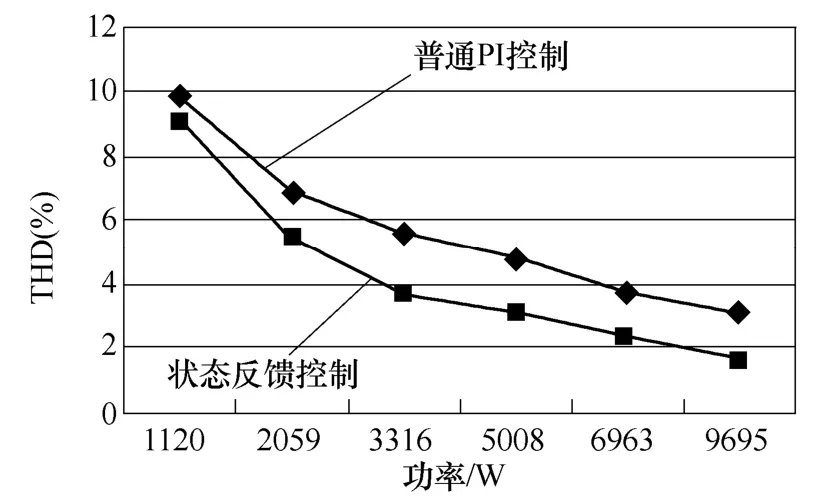
圖19 不同功率下并網電流THD 對比Fig.19 Comparison of grid current THD under different loads
通過以上實驗,可以證明基于狀態觀測器的狀態反饋對系統的動態以及穩態都有改善效果。
7 結論
本文在建立改進型離散狀態空間方程的基礎上,通過閉環極點配置實現了系統的最佳阻尼,明顯改善了系統的動態響應。設計了基于改進型離散狀態空間方程的改進型狀態觀測器,避免系統傳感器數量的增加。同時還討論了閉環極點對狀態觀測器極點配置的影響、狀態觀測值反饋的穩定范圍以及系統參數變化對穩定性的影響。最后在10kW 并網逆變器樣機上證實了所提出的方案對系統動態和穩態效果的改善。
[1]張強,張崇巍,張興,等.風力發電用大功率并網逆變器研究[J].中國電機工程學報,2007,27(16):54-59.Zhang Qiang,Zhang Chongwei,Zhang Xing,et al.Study on grid-connected inverter used in high-power wind generation system[J].Proceedings of the CSEE,2007,27(16):54-59.
[2]戴欣平,馬廣,楊曉紅.太陽能發電變頻器驅動系統的最大功率追蹤控制法[J].中國電機工程學報,2005,25(8):95-99.Dai Xinping,Ma Guang,Yang Xiaohong.A control method for maximum power tracing of photovoltaic generation system[J].Proceedings of the CSEE,2005,25(8):95-99.
[3]姚志壘,王贊,肖嵐,等.一種新的逆變器并網控制策略的研究[J].中國電機工程學報,2006,26(18):61-64.Yao Zhilei,Wang Zan,Xiao Lan,et al.Research on a novel grid-connected control strategy of inverter[J].Proceedings of the CSEE,2006,26(18):61-64.
[4]Liserre M,Blaabjerg F,Hansen S.Design and control of an LCL-filter-based three-phase active rectifier[J].IEEE Transactions on Industry Applications,2005,41(5):1281-1291.
[5]王斯然,呂征宇.LCL 型并網逆變器中重復控制方法研究[J].中國電機工程學報,2010,30(27):69-75.Wang Siran,Lü Zhengyu.Research on repetitive control method applied to grid-connected inverter with LCL filter[J].Proceedings of the CSEE,2010,30(27):69-75.
[6]徐志英,許愛國,謝少軍.采用LCL 濾波器的并網逆變器雙閉環入網電流控制技術[J].中國電機工程學報,2009,29(27):36-41.Xu Zhiying,Xu Aiguo,Xie Shaojun.Dual-loop grid current control technique for grid-connected inverter using a LCL filter [J].Proceedings of the CSEE,2009,29(27):36-41.
[7]Routimo M,Tuusa H.LCL type supply filter for active power filter-comparison of an active and a passive method for resonance damping[C].IEEE Power Electronics Specialists Conference,2007:2939-2945.
[8]Liserre M,Dell'Aquila A,Blaabjerg F.Stability improvements of an LCL-filter based three-phase active rectifier[C].IEEE 33rd Annual Power Electronics Specialists Conference,2002:1195-1201.
[9]Malinowski M,Bernet S.A simple voltage sensorless active damping scheme for three-phase PWM converters with an LCL filter[J].IEEE Transactions on Industrial Electronics,2008,55(4):1876-1880.
[10]Siran Wang,Xia Zhou,Jifeng Chen,et al.Investigation of fully digital controlled Li-ion battery power recovery system[C].IEEE Applied Power Electronics Conference and Exposition,Twenty-Fifth Annual,2010:2091-2095.
[11]Poh Chiang Loh,Holmes D G.Analysis of multiloop control strategies for LC/CL/LCL-filtered voltagesource and current-source inverters[J].IEEE Transactions on Industry Applications,2005,41(2):644-654.
[12]Erika Twining,Holmes D G.Grid current regulation of a three-phase voltage source inverter with an LCL input filter[J].IEEE Transactions on Power Electronics,2003,18(3):888-895.
[13]Wessels C,Dannehl J,Fuchs F W.Active damping of LCL-filter resonance based on virtual resistor for PWM rectifiers stability analysis with different filter parameters[C].IEEE Power Electronics Specialists Conference,2008:3532-3538.
[14]Shen Guoqiao,Xu Dehong,Cao Luping,et al.An improved control strategy for grid-connected voltage source inverters with an LCL filter[J].IEEE Transactions on Power Electronics,2008,23(4):1899-1906.
[15]Shen Guoqiao,Zhu Xuancai,Zhang Jun,et al.A new feedback method for PR current control of LCLfilter-based grid-connected inverter[J].IEEE Transactions on Industrial Electronics,2010,57(6):2033-2041.
[16]Eric Wu,Lehn P W.Digital current control of a voltage source converter with active damping of LCL resonance[J].IEEE Transactions on Power Electronics,2006,21(5):1364-1373.
[17]Dannehl J,Fuchs F W,Th X F,et al.PI state space current control of grid-connected pwm converters with LCL filters[J].IEEE Transactions on Power Electronics,2010,25(9):2320-2330.
[18]Ogata Katsuhiko[美].離散時間控制系統.陳杰等譯[M].北京:機械工業出版社,2005.
[19]Xue Mingyu,Zhang Yu,Liu Fangrui,et al.Optimized pole and zero placement with state observer for LCL-type grid-connected inverter[C].IEEE Energy Conversion Congress and Exposition,2011:377-382.
[20]Choi C H.Step response improvement by pole placement with observer[C].40th Southeastern Symposium on System Theory,2008:7-12.
[21]侯朝勇,胡學浩,惠東.基于離散狀態空間模型的LCL 濾波并網變換器控制策略[J].中國電機工程學報,2011,31(36):8-15.Hou Chaoyong,Hu Xuehao,Hui Dong.Control strategy of grid-connected converter with LCL filter based on discrete state-space model[J].Proceedings of the CSEE,2011,31(36):8-15.
[22]Gabe I J,Montagner V F,Pinheiro H.Design and implementation of a robust current controller for VSI connected to the grid through an LCL filter[J].IEEE Transactions on Power Electronics,2009,24(6):1444-1452.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
