艦船相對組合導航最優定位算法
2014-11-29 03:01:56馮肖亮史軍杰邱愛兵
中國航海 2014年4期
劉 明, 馮肖亮, 史軍杰, 邱愛兵
(1. 南通大學 電氣工程學院, 江蘇 南通 226019; 2. 河南工業大學 電氣工程學院, 鄭州 450001; 3. 南通航運職業學院 管理信息系, 江蘇 南通 226010)
艦船相對組合導航最優定位算法
劉 明1, 馮肖亮2, 史軍杰3, 邱愛兵1
(1. 南通大學 電氣工程學院, 江蘇 南通 226019; 2. 河南工業大學 電氣工程學院, 鄭州 450001; 3. 南通航運職業學院 管理信息系, 江蘇 南通 226010)
針對船舶相對組合導航過程中常見的通信延遲問題,在最小均方誤差意義下發展出一種最優融合濾波方法。首先將各相對測量信息轉化為目標船只的偽測量信息,然后按照序貫融合的思想來設計融合濾波算法。運用該算法,不僅能夠保證濾波過程的實時性,而且可以保證導航精度的最優性。通過仿真實驗,驗證了方法的有效性和可行性。
水路運輸;相對導航;延遲;融合濾波;實時性
現有的艦船導航系統主要包括全球衛星定位系統(Global Positioning System, GPS)、捷聯慣性導航系統(Strap-down Inertial Navigation System, SINS)、地文導航系統、天文導航系統等。[1-2]由于單一導航系統存在一定的局限性,因此需要利用信息事例技術設計一種準確、快速、高性能的組合導航系統。組合導航系統能夠綜合利用單個導航設備的測量數據,提供更準確可靠的位置、航向等航行信息。目標船在航行過程中不僅可以獲得自身導航設備采集到的信息,而且能夠通過船舶自動識別系統(Automatic Identification System, AIS)及其他設備接收到一定海域內相鄰船舶的定位設備發送的自身位置、航向等航行信息。因此在導航過程中,除了利用自身導航設備提供的測量信息以外,還需要根據參考船的位置、速度、姿態等信息來估計本船的位置、速度、姿態等航行信息,即相對組合導航。目前,該領域的研究主要集中于航天器對接、水下載體編隊運動、多移動機器人等的導航與定位過程[3-10],對艦船導航過程的研究相對較少[1-2,11]。文獻[1]和[2]在假設船舶自身導航系統與參考位置的導航信息同步、無延遲到達的情況下提出一類艦船的相對組合導航算法;文獻[3]基于GPS偽距單差研究了艦船的相對導航問題。此外,文獻[2]還進一步考慮了各導航系統采樣頻率的異步性,并基于錯序延遲信息的融合濾波方法研究了導航系統的測量信息延遲到達場景下的相對組合導航定位問題。但是,其給出的多艦船相對組合導航定位算法忽略了不同船舶導航信息之間的相關性,這將嚴重影響相對組合導航定位的精度。因此,考慮到艦船組合導航系統在出現錯序或延遲信息時所產生的信息相關性,發展出相應的最優相對組合導航定位算法,主要針對艦船組合導航系統中的信息延遲問題開展研究,因而在一定程度上弱化了海浪、洋流、天氣等因素的影響,將其近似建模為系統噪聲。
1 系統描述
考慮艦船的航行狀態方程[11-12],可建模為
xi(k+1)=Fi(k+1,k)xi(k)+wi(k+1,k)
(1)
式(1)中:i=1,2,…,M;航行狀態向量xi(k)=[xi(k),yi(k),υi(k),φi(k)]T,其中xi(k),yi(k),υi(k),φi(k)分別為東向坐標、北向坐標、對地航速、對地航向;Fi(k+1,k)為狀態轉移矩陣;wi(k+1,k)為過程噪聲。
每艘艦船都可以通過自身的各類導航設備(如GPS,SINS等)獲取測量信息,以對自身的航行狀態進行估計。這些導航信息均可寫成如下形式。
yi,l(k)=Hi,l(k)xi(k)+vi,l(k)
(2)
式(2)中:l=1,2,…,Γ,Γ為船上的導航設備的數目;yi,l(k)為裝備在標號i船上的第l個導航設備的測量值;Hi,l(k),vi,l(k)分別為對應的測量矩陣和測量噪聲。
目標艦船與某一參考船(假設其標號為i)的位置關系見圖1。

圖1 目標艦船與某一參考船的位置關系示意圖
在圖1中,實心圓為目標艦船的位置,空心圓為參考船的位置。參考船與目標艦船之間的位置關系可能有I、II、III、IV等4類,在第I類位置關系中,θi(k)為目標艦船與參考船之間的方向角,ρi(k)為兩船間的距離。在目標艦船上,ρi(k)及θi(k)可通過雷達測量獲得,測量方程可表示為
(3)

由圖1可知
(4)

(5)
在雷達測量精度有一定保障的情況下,可用η1,i(1,k),η2,i(2,k)近似代替兩船間的距離及目標艦船對參考船的方向角,即
(6)
由此得到的參考船對目標艦船的相對量測為
(7)


(8)
式(8)中:j1≥1,j2≤M;j3≥1,j4≤Γ,j5≥2,j6≤M;l1≥1,l2≤k。
在k時刻,如果各參考船的相對量測信息與目標船通過自身的導航設備得到的測量信息yi,l(k)能夠同時獲得,那么就可以利用測量值擴維形式的并行式Kalman融合濾波器或文獻[12]中提出的分步式(序貫式)融合濾波技術對這些導航信息進行處理。但是,受各參考船自身導航處理的效率、傳輸網絡、目標艦船接受方式等因素的影響,來自參考船的相對測量信息在到達目標艦船時會出現隨機延遲現象(一般情況下,延遲時間小于1步采樣間隔),這會使不同參考船對同一位置的目標艦船的相對測量信息不能同時到達目標艦船。目標艦船在同一時刻接收到的(相對)測量信息可能源于其在不同航行狀態下的相對測量信息,這給目標艦船的精確導航定位帶來了困難。文獻[2]在近似忽略不同船舶相對測量信息相關性的基礎上,給出了一類相對測量信息發生錯序時的次優組合導航算法。此處擬在融合濾波過程中充分考慮相對測量信息在發生錯序情況下各參考船相對測量信息相關性的影響,設計一種最優的相對組合導航定位算法。
2 相對組合導航定位算法
測量信息在傳輸過程中發生錯序時,融合中心在同一融合周期內接收到的測量信息來自于對不同時刻系統狀態的觀測。如需利用這些測量信息對系統當前的狀態進行融合估計,首先需要克服時間軸上的不同步現象。此處采用偽量測轉化的方法來解決各參考船相對測量信息的時間坐標統一問題。
2.1偽量測轉化
假設融合周期[k,k+1)中,目標艦船接收到的一個可能的相對測量信息為yi(j) (i=1,2,…,N;0lt;j≤k),建立其與系統狀態之間的等量關系式為

(9)
式(9)中:
(10)
F(j,k)=F-1(k,j),F(k,k)=I
F(k,j)=F(k,k-1)F(k-1,k-2)×…×
F(j+1,j)
(11)
w(k,j)=F(k,k)w(k,k-1)+F(k,k-1)w(k-1,k-2)+…+F(k,j+1)w(j+1,j),w(k,k)=0
(12)
這樣,就將傳感器i在j時刻采集到的測量值yi(j)轉化為k時刻的偽測量。由式(10)可知,偽測量轉換之后所得的測量噪聲v*(i)與過程噪聲w(j+1,j),…,w(k,k-1)均相關。因此,在利用延遲量測yi(j)對系統當前的狀態進行更新時,需充分考慮該噪聲相關性對濾波器參數的影響。此外,需注意:
1) 文獻[2]在進行偽測量轉換后,仍將測量噪聲v*(i)考慮為與過程噪聲不相干的白噪聲,這會對濾波精度產生一定影響。

2.2融合濾波


(13)
P(k|k-1)=F(k,k-1)P(k-1|k-1)×
FT(k,k-1)+Q(k,k-1)
(14)
(15)
在線性最小均方誤差意義下推導,得知
(16)

(17)
(18)
(19)
(20)
(21)
(22)

(23)
(24)

(25)

(26)

(27)
(28)
(29)
(30)

(31)
(32)


3 應用仿真
以1艘目標艦船和2艘參考船在恒定航向下勻速運動時的CV動態模型來描述,式(1)中的狀態轉移矩陣為
(33)
式(33)中:φ1=60°;φ2=30°;φ3=30°;Ti=12 s;i=1,2,3。系統噪聲滿足如下統計特性:
假設各船都有2套導航設備,且導航設備的測量矩陣均為單位陣,初始航行狀態為:x1(0)=[10 5 10 60]T,P1(0)=diag{10,10,50,1};x2(0)=[15 6 12 30]T,P2(0)=diag{10,10,50,1};x3(0)=[15 9 10 30]T,P3(0)=diag{10,10,50,1}。
仿真場景:3艘船舶的導航系統的更新周期均為12 s,目標艦船的對地航速為12 kn,參考船1的對地航速為14 kn,參考船2的對地航速為16 kn。受參考船自身導航處理的效率、傳輸網絡、目標艦船接受方式等因素的影響,目標艦船獲取相對量測信息時滯后了1個周期(見圖2)。目標艦船和參考船的仿真時間均為100個周期且同時開始工作。目標艦船的導航系統獨立工作30個周期后開始接收參考船的相對量測信息。仿真結果見圖3~圖6。
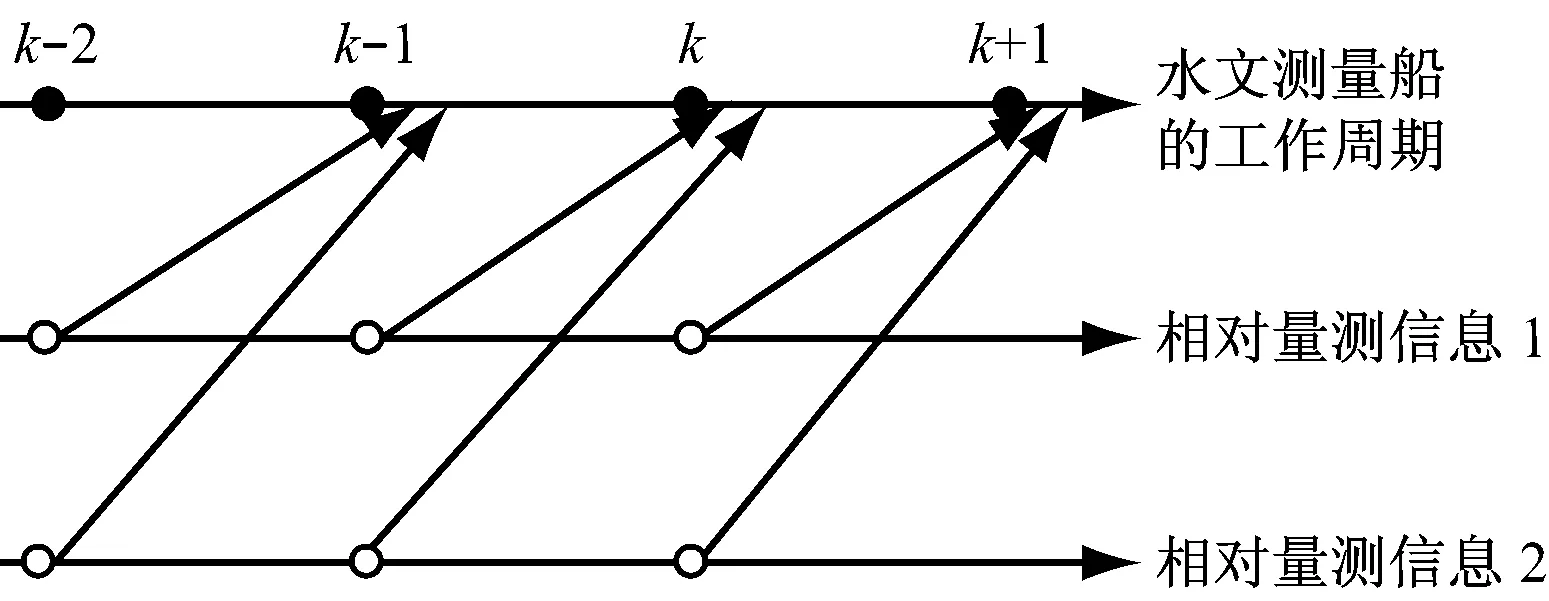
圖2 相對量測信息的延遲示意圖
由上述仿真結果可知,利用參考船的相對量測信息的相對組合導航算法能夠對目標艦船的航跡進行有效估計。文獻[2]在處理相對測量信息的錯序問題時,沒有考慮偽量測噪聲轉換后的相關性,圖5~圖6給出了文獻[2]所提組合導航算法的估計誤差曲線(算法1),同時將其與所提算法估計誤差曲線(算法2)進行了比較,可以看出,所提算法具有更好的估計效果。
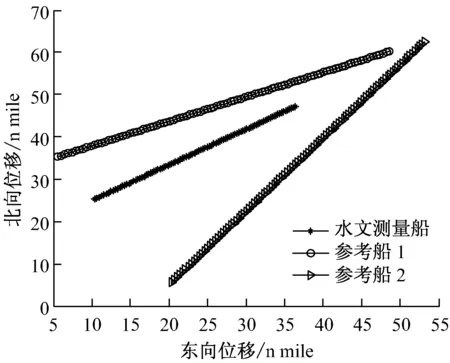
圖3 3艘船的真實航跡
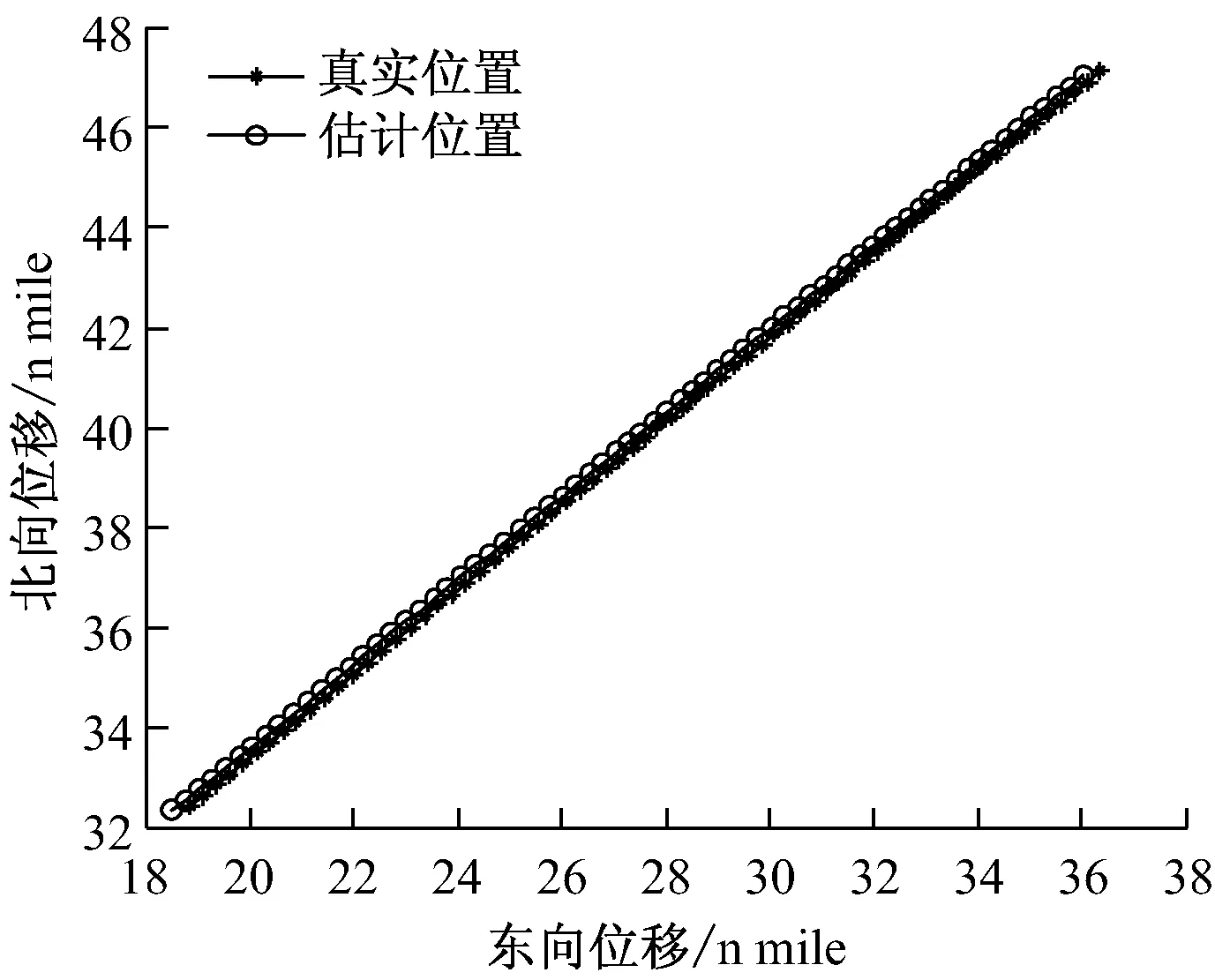
圖4 目標艦船的航跡估計曲線
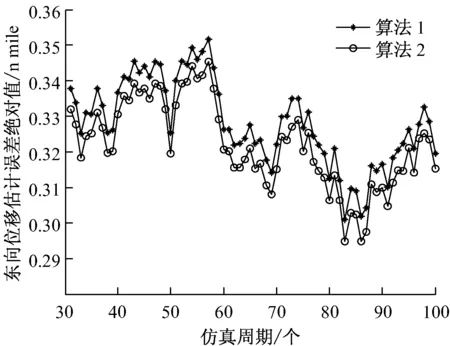
圖5 東向位移的絕對估計誤差曲線
圖6 北向位移的絕對估計誤差曲線
4 結 語
通過在線性最小均方誤差意義下進行嚴格推導,給出了一種艦船組合導航系統出現錯序延遲信息時的最優相對組合導航定位算法,可以有效處理因通信條件局限性導致的相對測量信息一步錯序傳輸延遲問題。通過數值仿真實驗,驗證了方法的可行性與有效性。
船舶在海面作業過程中會受到天氣、海浪等因素的影響,如何在艦船相對組合導航方法中考慮這些因素的影響值得進一步深入研究。
[1] 高社生, 何鵬舉, 楊波, 等. 組合導航原理及應用[M]. 西安: 西北工業大學出版社, 2012:5-6.
[2] 葛泉波. 無序信息的網絡融合及在艦船組合導航中的應用[D].上海:上海海事大學, 2008.
[3] 王小剛, 郭繼峰, 崔乃剛. 一種魯棒Sigma-point濾波算法及其在相對導航中的應用[J]. 航空學報, 2010, 31(5): 1024-1029.
[4] 王龍, 董新民, 郭軍,等. 基于自適應聯邦濾波的相對導航信息融合[J]. 飛行力學, 2011, 29(5): 92-96.
[5] 陶久亮, 邵曉巍, 龔德仁,等. 基于魯棒卡爾曼濾波的編隊衛星相對導航[J]. 航天控制, 2011, 29(5): 8-14.
[6] 劉勇, 徐世杰, 徐鵬,等. 基于改進型兩步卡爾曼濾波的相對導航方法[J]. 中國空間科學技術, 2011, 31(3): 20-25.
[7] 張共愿, 程詠梅, 程承,等. 基于相對導航的多平臺INS誤差聯合修正方法[J]. 航空學報, 2011, 32(2): 271-280.
[8] 王楷, 陳統, 徐世杰. 基于雙視線測量的相對導航方法[J]. 航空學報, 2011, 32(6): 1084-1091.
[9] 李九人, 李海陽, 唐國金,等. 基于僅測角的自主交會相對導航策略研究[J]. 中國科學:技術科學, 2011, 41(9): 1197-1204.
[10] 王玲, 邵金鑫, 萬建偉,等. 基于相對觀測量的多機器人定位[J]. 國防科技大學學報, 2006, 28(2): 67-72.
[11] 王秀森, 周紅進, 張尚悅. 基于GPS偽距單差的艦船相對導航方法[J]. 中國慣性技術學報, 2012, 20(4): 464-467.
[12] 文成林, 呂冰, 葛泉波. 一種基于分步式濾波的數據融合算法[J]. 電子學報, 2004, 32(8): 1264-1267.
OptimalPositioningAlgorithmforIntegratedRelativeNavigationofShips
LIUMing1,FENGXiaoliang2,SHIJunjie3,QIUAibing1
(1. School of Electrical Engineering, Nantong University, Nantong 226019, China, 2. College of Electrical Engineering, Henan University of Technology, Zhengzhou 450001, China, 3. Management and Information Department, Nantong Shipping College, Nantong 226010, China)
An optimal fusion filtering method for relative ship navigation is proposed to deal with the communication delay. The idea is to derive the synchronized pseudo measurements of the target ship from the actual measurement data and to process the derived data instead of actual measurements with an optimal real-time sequential fusion filtering algorithm in the sense of linear minimum mean error. The proposed method has the advantages of real time and optimality. The simulation is conducted to verify the effectiveness and feasibility of the method.
waterway transportation; relative navigation; delay; fusion filtering; real time
2014-07-26
國家自然科學基金(61104028);南通航運職業技術學院科研項目(HYKJ/2011A01);南通大學科研項目(12R07)
劉 明(1981—), 男, 江蘇宿遷人,講師,從事船舶自動化及船舶導航等研究。E-mail: liumingsongliuming@126.com
1000-4653(2014)04-0006-05
TN911.7;U675.7
A
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中華手工(2017年2期)2017-06-06 23:00:31
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中外會展(2014年4期)2014-11-27 07:46:46
