水面拖曳系統龍須纜靜態構型算法
2014-11-29 03:01:57孫洪波施朝健翁躍宗
中國航海 2014年4期
關鍵詞:系統
孫洪波, 施朝健, 翁躍宗
(1. 上海海事大學 商船學院, 上海 201306; 2. 集美大學 航海學院, 福建 廈門 361021)
水面拖曳系統龍須纜靜態構型算法
孫洪波1, 2, 施朝健1, 翁躍宗2
(1. 上海海事大學 商船學院, 上海 201306; 2. 集美大學 航海學院, 福建 廈門 361021)
為快速確定水面拖曳系統龍須纜的穩態運動參數,建立拖纜三維穩態平衡微分方程。根據拖纜兩端的邊界條件,利用二分法和龍哥庫塔方法,對拖纜微分方程進行積分求解,確定水面拖曳系統中龍須纜的構型及穩態運動參數。以具體的拖曳實例為例進行數值仿真計算,分析龍須纜物理參數變化對系統穩態運動的影響。結果表明,運用這種算法,可以在拖曳系統初步設計階段快速確定系統索具的參數,并能滿足系統設計要求。
水路運輸; 水面拖曳; 龍須纜; 靜態構型; 二分法
水面拖曳系統作為一種水上運輸及失事船舶救助系統,應用于諸多領域。其中的一種龍須纜拖曳方式,由于能夠有效抑制整個拖曳系統在拖航過程中的偏蕩,應用更加廣泛。特別是在大型遠洋船舶拖航時,采用的多是龍須纜。
龍須纜拖曳系統坐標系見圖1,其中龍須纜PLOC和PROC的長度由被拖物拖力點距離確定,其夾角α應在35°~60°。沿海及遮蔽航區可用龍須纜;導纜孔磨擦區域必須使用龍須鏈,不得使用鋼纜[1];主拖纜OCPT為鋼纜。
拖曳系統的靜態構型指的是拖曳系統勻速直線運動時的運動姿態,在該系統的計算中具有十分重要的作用,不僅可以在系統設計初期直接幫助確定系統的物理參數,而且可以作為拖曳系統動態運算初始值,以加速運算收斂。因此,提出的龍須纜拖曳系統的靜態構型計算方法不僅對龍須纜的設置有現實指導意義,而且可為系統的動態分析提供計算基礎。

圖1 龍須纜拖曳系統坐標系
拖纜水動力模型建模方法主要包括: 集中質量法、有限元法、有限差分法和直接積分法等。WALTON等[2]采用集中質量法研究了海軍武器試驗中水下錨鏈的二維運動響應,并給出了詳細的求解算法和公式。中島俊夫等[3]建立了船舶系留錨鏈的三維集中質量法模型,并給出了詳細的算例。ABLOW等[4]在建立拖纜運動控制微分方程的基礎上, 采用有限差分法求解其三維動態運動。雖然有限元法和直接積分法更適于分析拖纜靜力,但計算繁瑣。[5]國內的王飛、朱軍等[6-8]在拖纜的建模與仿真方面,分別對集中質量法和有限差分法進行了詳細的總結和研究。上述研究多集中于單纜及水下拖曳系統,關于水面拖曳特別是龍須纜拖曳的研究比較少。
基于以上分析,首先對拖纜進行空間離散;然后建立拖纜微元在流體中穩定運動時,在重力、浮力和流體阻力作用下的平衡方程;最后將拖纜的邊界條件轉換為一組初始值,采用二分法進行積分求解。
1 拖纜三維穩態運動數學模型
1.1拖纜系統坐標系轉換關系
圖1中,慣性坐標系Oxyz的3個坐標軸單位矢量為(i,j,k),局部坐標系Otnb的3個坐標軸單位矢量為(t,n,b),2個坐標系均為右手坐標系,其中:t為纜的切線方向;n,b為纜的2個法線方向。根據歐拉角的定義,可得2個坐標系的變換關系為
(i,j,k)=BV(t,n,b)
(1)
(2)
式(2)中:θ為水平面方位角;φ為垂向仰角。
1.2拖纜微元受力平衡方程式
設拖纜細長、有柔性、圓柱形狀,受重力、水動力和慣性力作用,由拖船拖動前進,不考慮所受扭矩。拖纜微元Δs在t時刻所受張力、慣性力、水中重力和流體力分別為T,B,W和F。s為未拉伸的拖纜長度,S為拉伸后的拖纜長度。考慮一般拖纜材料的拉伸特性,有S′=?S/?s=1+eT,其中:e=1/EA,E為拖纜彈性模量,A為拖纜橫截面積。根據牛頓第二定律,拖纜微元的動力平衡方程為

(3)
在計算拖纜穩態構型時,慣性力B=0,因此將式(3)與重力、浮力及阻力代入平衡方程中,并在拖纜局部坐標系下沿各個坐標軸方向展開,所得平衡
方程可寫為標量形式:
(4)
式(4)中:ρ為海水密度;g為重力加速度;A為拖纜橫截面積;m為每米拖纜質量;w=(m-ρA)g為水中每米纜重量;d=(1+eT)1/2d0為拉伸后纜的直徑,d0為未拉伸纜的直徑;Ct,Cn和Cb為拖纜的水動力系數;ut,un,ub分別為拖纜微元在3個局部坐標軸方向上的速度。
拖纜在慣性系下的坐標見式(5)。
(5)
2 邊界條件及穩態初始值
為簡化計算,設定拖船和被拖船的初始航向為零,這樣主拖纜部分可簡化到二維空間來考慮,而龍須纜的兩根支纜存在以下關系:
(6)
式(6)中:下標L,R分別為左支纜和右支纜。
2.1不連續點的處理
經過上述簡化,不連續點(即OC點)處的約束方程可根據經典力學平衡關系得到。
(7)
聯立式(6)可得
(8)
式(8)中:下標M為主拖纜;下標MC,LC,RC分別為主拖纜連接點、左支纜連接點和右支纜連接點。
2.2端點的處理
首先考慮被拖船端,當給定了穩定拖航速度V后,被拖船端點PL和PR所受的水平拉力FL=FR=0.5XuuV2,Xuu為被拖船縱向運動的總阻力系數。根據拖纜兩端的空間位置以及兩根支纜的對稱關系,拖纜的邊界條件可確定為
(9)
式(9)中:下標PL,PR,PT分別為左支纜拖帶點、右支纜拖帶點和主拖纜拖帶點;sC和B分別為支纜長度、兩支纜拖帶點間的距離;Z為水中浸深,如龍須纜兩端都在水面處可取為0。
根據實際情況,可確定φPL,φPR和θPL,θPR的取值范圍為:φPL,φPR∈(-π/2,π/2);θPL∈[0,π/2);θPR∈(-π/2,0]。
式(9)可采用二分法迭代求解,直至滿足式(10)要求。其中,εz和εy分別為龍須纜兩端位置點垂向誤差和兩支纜連接點位置誤差,計算時均取0.001。
(ZPL-ZPT)|lt;εz
(10)
3 穩態運動計算仿真
3.1計算方法及步驟
通過聯立式(6)和式(9),可將式(9)簡化為只含有2個變量的方程組形式:
(11)
式(11)可以采用二分法迭代求解。雖然二分法在擴展后可以解決二維、三維甚至更高維的問題[7],但通過對龍須纜拖帶的實際情況進行分析,可以將式(11)變為一維問題進行求解。由于左右兩根龍須纜對稱,僅需以其中一根龍須纜為例進行求解。以左側龍須纜為例,根據φP和θP的取值范圍,具體的計算求解步驟如下。

運用該方法迭代求解龍須纜靜態構型的計算過程見圖2,從中可以看出該方法每次循環的計算結果和龍須纜的收斂過程。需指出,φP的計算值在計算過程中是臨時的或無用的。如果在計算過程中動態地設置φP的取值范圍(即逐漸減小φP的取值范圍),還可以提高計算效率。
3.2計算仿真
為驗證該算法的可行性與精確性,以直徑為70 mm的拖纜為例進行計算仿真。拖纜主尺度見表1。

表1 拖纜參數
以300 m長的拖纜為例,進行不同拖力下的計算仿真,并與實驗結果[9]進行比對,以驗證算法的精確性,結果見圖3。
通過與實驗數據比較可知,本算法不僅可行,而且在精度上完全滿足實際工程計算要求。
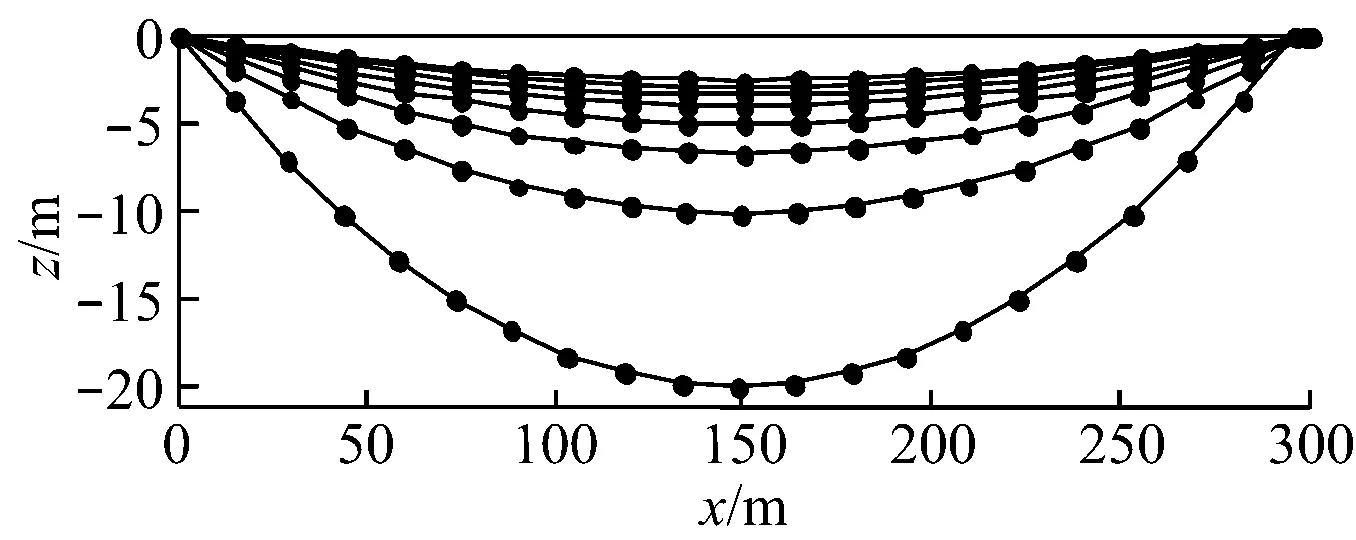
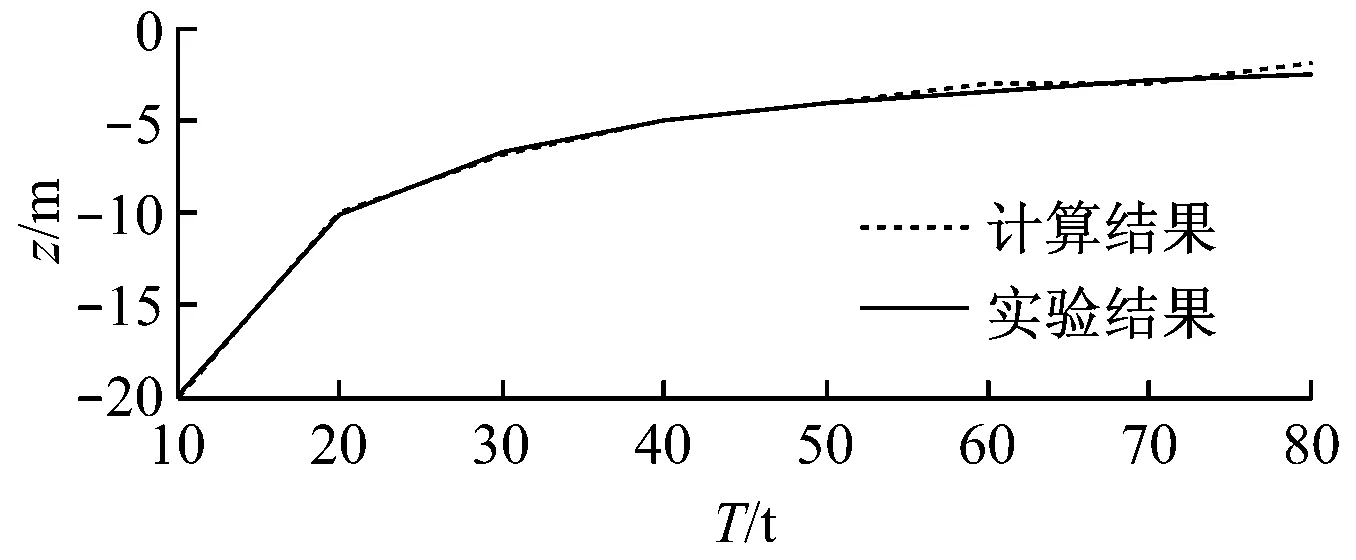
圖3 300 m拖纜構型及懸垂深度
為進一步驗證本算法在龍須纜構型計算中的可行性與精確性,以海洋石油支持船“海洋石油681”號拖船以225 t系柱拉力海上拖帶“海洋石油981”號半潛平臺為例進行計算仿真。表2為海上拖航的索具配置,圖4為拖船和平臺在拖航作業工況下靜水中的拖航阻力曲線。[9]平臺龍須纜懸掛點寬度B=56.56 m。
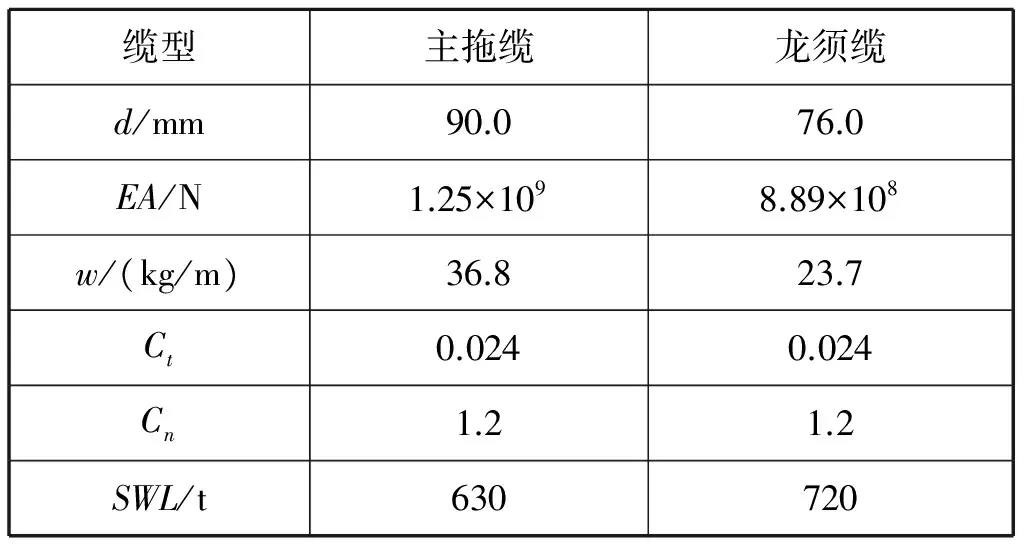
表2 海上拖航索具配置
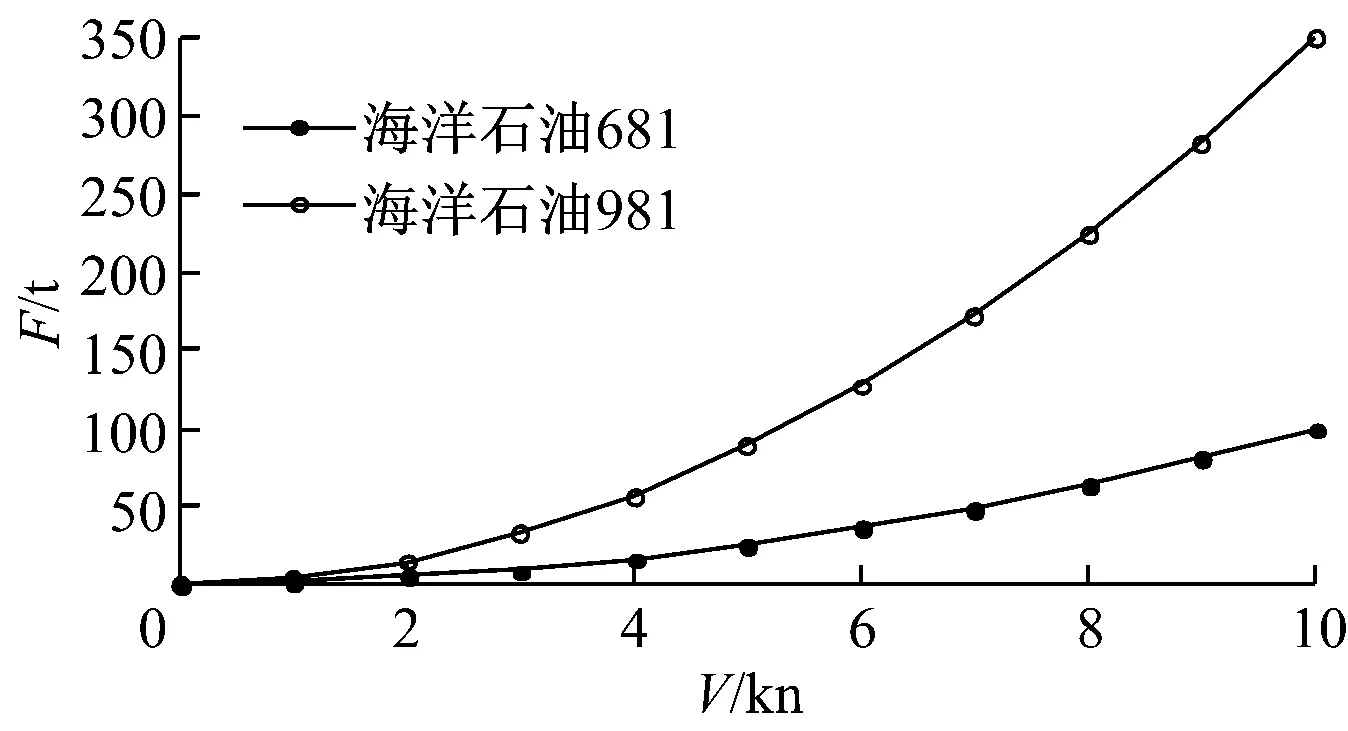
圖4 拖航阻力曲線
圖5和圖6為主拖纜長1 200 m,龍須纜長60 m,在最大拖航速度下的龍須纜構型及沿纜長的張力分布情況。

圖5 拖纜構型
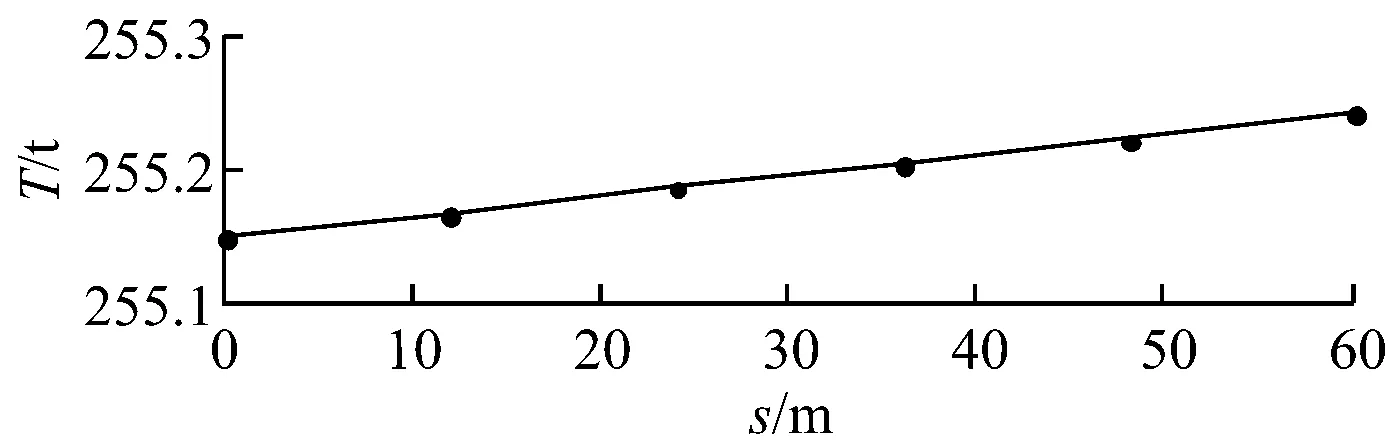
圖6 沿纜長的張力分布
根據拖船與平臺的阻力曲線,可以反推出此時的拖航速度為7 kn。但分析圖5和圖6可知,雖然此時滿足拖纜安全工作負荷要求,但拖纜的懸垂深度并不能滿足《海上拖航技術要求》中“遠洋拖帶移動式平臺的懸垂值≥15 m”的規定[1]。其原因是在計算拖曳系統拖航阻力時,既考慮了拖船與被拖平臺的拖航阻力,又計算了拖纜的拖帶阻力。因此,計算方法不僅可行,而且更加精確。
圖7和圖8為不同拖航速度下的龍須纜構型及沿纜長的張力分布情況。
圖7 拖纜構型
圖8 沿纜長的張力分布
圖9和圖10為3 kn拖航速度、不同主拖纜長度下的龍須纜構型及沿纜長的張力分布情況。
圖9 拖纜構型
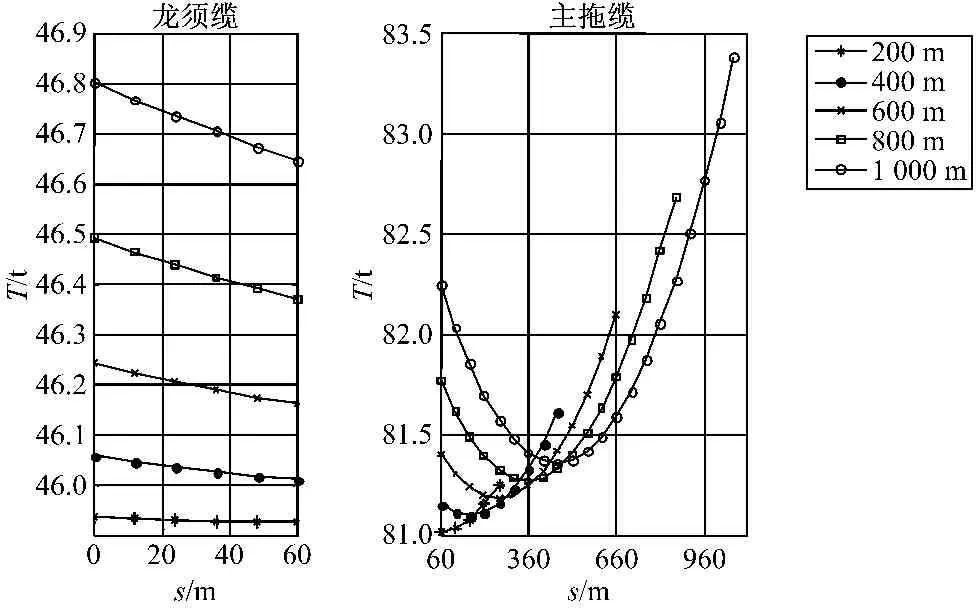
圖10 沿纜長的張力分布
4 結 語
在建立拖纜三維穩態平衡微分方程的基礎上,利用二分法和龍哥庫塔方法對拖纜微分方程進行了積分求解,最終確定了龍須纜拖曳系統穩態拖曳下的拖纜構型及拖纜上的張力分布,通過實際算例驗證了算法的可行性與精確性。此外,還進行了不同拖航速度及拖纜長度下的計算仿真,結果充分表明
了拖曳系統參數對龍須纜拖曳系統的影響。因此,這種算法不僅對龍須纜拖曳系統設計初期確定纜索參數具有較強指導意義,而且由其得到的拖曳系統的穩態構型可為該系統的動態分析提供計算基礎(即可加速龍須纜動態計算仿真的收斂性)。
[1] 中華人民共和國交通部.JT/T 214—1995,海上拖航技術要求[S].
[2] WALTON T S, POLACHECH H. Calculation of Transient Motion of Submerged Cables[J]. Mathematics of Computation, 1960,14:27-46.
[3] 中嶋俊夫,元良誠三,藤野正隆. 質點系モデルによる係留ラインの3次元動的解析法[C]. 東京:日本造船學會論文集, 1983.
[4] ABLOW C M, SCHECHTER S. Numerical Simulation of Undersea Cable Dynamics[J]. Ocean Engineering, 1983, 10(6):443-457.
[5] VANDANA R K. Finite Element Analysis of Under Water Towed Cables[C]. Proceedings of International Conference on Energy and Environment, 2013.
[6] 王飛, 黃國梁,鄧德衡. 水下拖曳系統的穩態運動分析與設計[J]. 上海交通大學學報, 2008, 42(4):679-684.
[7] 王飛. 海洋勘探拖曳系統運動仿真與控制技術研究 [D].上海:上海交通大學,2007.
[8] 朱軍,熊鷹,王志國. 拖纜系統直線定常運動仿真計算[J]. 海軍工程大學學報, 2001,13(2):17-20.
[9] 林文錦, 蔡鈿, 邵哲平. 海洋石油支持船拖航作業技術及應用指導書[M].北京:人民交通出版社,2011:10.
SteadyStateSolutionofTowedSurfaceSystemwithBridleConfiguration
SUNHongbo1,2,SHIChaojian1,WENGYuezong2
(1. Merchant Marine College, Shanghai Maritime University, Shanghai 201306, China; 2. Navigation College, Jimei University, Xiamen 361021, China)
In order to quickly determine the steady state motion parameters of the surface towed system with bridle configuration, the towing steady-state equilibrium differential equation is established. The differential equations are solved under the boundary conditions at the ends of the towing lines by both bisection method and 4th order Runge-Kutta method, to determine the towing bridle configuration and the steady state motion parameters. The numerical simulation was carried out and the effect of physical parameters of the towing bridle on the steady state motion of the system is analyzed. The simulation results prove that this algorithm can be used to determine the parameters of the systems quickly for preliminary design.
waterway transportation; surface towing; towing bridle; static configuration; bisection method
2014-08-12
國家自然科學基金(51109090);李尚大基金資助項目(ZC2010011)
孫洪波(1977—),男,黑龍江尚志人,講師,博士生,研究方向為船舶運動建模及仿真。E-mail: sunhongbo1977@126.com
1000-4653(2014)04-0059-05
U661.3
A
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
