電網AVC 模糊控制理論應用研究
2014-12-03 02:16:54付寧FUNing
價值工程 2014年36期
付寧 FU Ning
(內蒙古電力公司烏蘭察布電業局,烏蘭察布 012000)
(Ulaanchab Electric Power Supply Bureau,Inner Mongolia Electric Power Company,Ulaanchab 012000,China)
0 引言
傳統的控制方法需要建立控制系統的數學模型。但是在現實中,有的控制系統因結構復雜沒辦法建立模型,傳統的控制方法不奏效。于是研究者基于人對被控對象的操作經驗設計了一套模糊控制理論。我們不必了解被控對象的數學模型,只需借助實踐經驗就能實現控制目標。而地調AVC 控制是一個具有非線性和多變量控制系統,采用傳統的九區控制方法雖然能夠基本實現控制電壓穩定的目標,但其沒有考慮到無功對電壓的影響,在實際使用過程中容易造成電容器頻繁投切以及變壓器分接頭頻繁調整的問題。而根據十一區控制理論,采用模糊控制技術根據日常操作的經驗,判斷是否進入振蕩區,實現特定的操作可以達到簡化過程、精確控制的目的。
本文根據無功調節的十一區控制原理,結合模糊控制思想,設計了基于十一區控制理論的地調AVC 模糊控制系統。仿真結果表明,該地調AVC 模糊控制系統具有減少調節設備動作次數,控制曲線平滑的優點,完全滿足電力系統可靠性、實時性的要求。
1 無功電壓控制
1.1 無功電壓控制的原理 無功電壓控制目標采用基于九區圖的控制策略。如圖1所示。
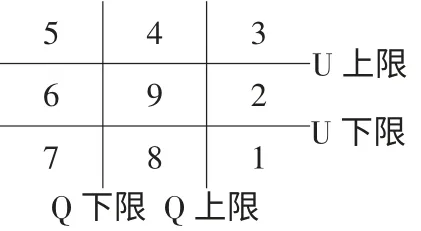
圖1 九區圖
九區圖各區域具體的綜合控制策略如圖2所示。
1.2 考慮變壓器和電容器動作延時的模糊控制系統 在變壓器和電容器動作無延時的模糊控制系統是基于理想狀態設計的。在現實中,變壓器和電容器都是在機械部件的帶動下動作,因此一般會延時十幾分鐘。為控制變壓器、電容器的動作次數,研究時考慮把電壓和無功平面細分為九個區,基于電壓和無功在電壓和無功平面上所處的位置設計控制規則,使原來的九區控制圖變成現在的十一區圖。
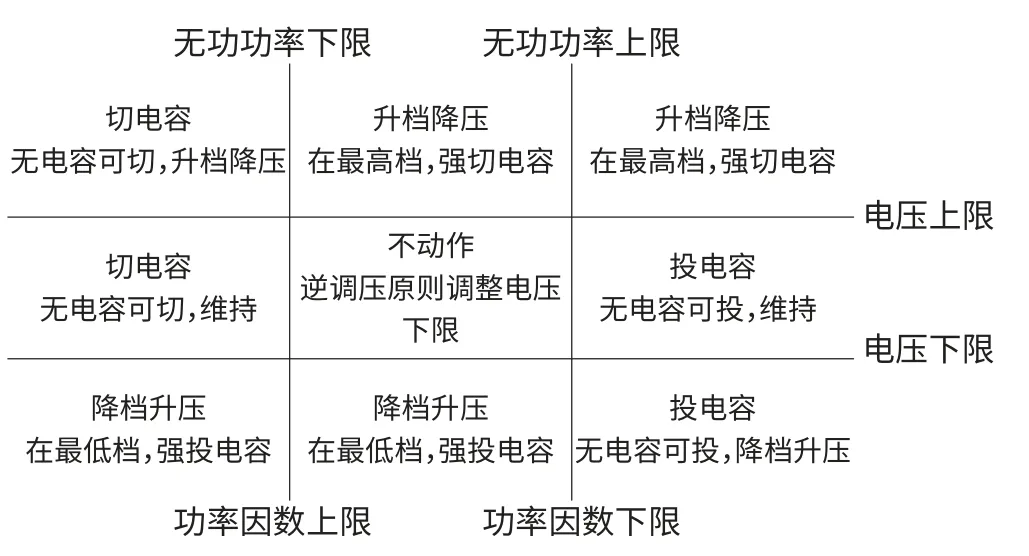
圖2 九區圖各區域的控制策略
2 模糊控制
本文根據無功調節的十一區控制原理,結合模糊控制思想,設計了基于十一區控制理論的地調AVC 模糊控制系統。在本系統中,根據人的實際經驗操作及推理可以如下規則如下:eu 越大,eq 越大,輸出U 中變壓器檔位降低就越大,投入電容就越多;eu 越小,eq 越小,輸出U 中變壓器檔位升高就越大,切除電容就越多;eu 為零,eq 為零,輸出U 中變壓器檔位不變,電容沒有操作;eu 為5檔,eq 為5檔,進行組合后得到25條控制規則(括號部分為檔位操作輸出,不帶括號的為電容操作輸出),得到規則表如表1所示。
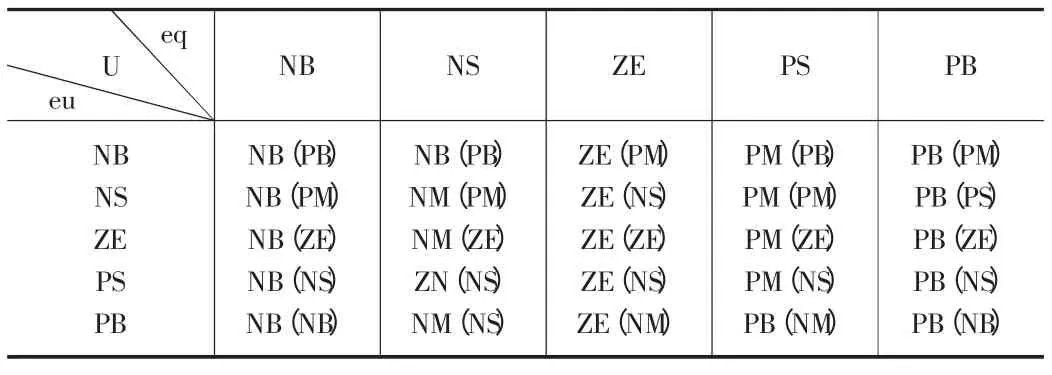
表1 地調AVC 控制模糊規則表
3 模糊控制的地調AVC 控制系統
基于模糊控制的地調AVC 控制系統由主站控制系統、數據實時采集系統、通信系統、站內控制系統組成;其中采集系統由主站SCADA 系統和站內的RTU 組成,通信系統由調度數據網或專線組成、主站控制系統由基于模糊控制的AVC 控制模塊組成的AVC 控制系統,子站控制系統由變電站VQC、電容補償設備、變壓器分接頭組成,它們共同構成完整的地調AVC 控制系統。
其工作過程為變電站的RTU 采集站內遙測、遙信、遙調、遙控等四遙信息,經過調度數據網或專線上傳至主站的SCADA 系統,主站的AVC 控制系統通過SCADA 系統讀取實時數據,將數據送到基于模糊控制的AVC 控制模塊,該模塊對母線電壓和主變高壓側無功進行處理,經過模糊化、模糊控制規則、模糊決策、反模糊化等過程,得出控制信號,通過主站SCADA 系統、調度數據網或專線、將信息下發到變電的RTU 裝置,在變電站內,通過RTU 裝置,將該指令下發到站內的VQC,通過控制變電站內的電容補償裝置和變壓器分接頭,控制站內的無功和電壓。當主站的AVC 系統出現問題時或通信出現問題時,站內可以通過獨立的VQC 對無功和電壓進行控制,達到控制電壓和無功的目的。
4 結果分析
本文以烏蘭察布電業局的地調AVC 控制系統為例,選擇橋西站進行模擬分析當電壓控制范圍為10kV-10.7 kV 時,沒有投入AVC 時,電壓低于10kV,為9.8kV;投入AVC 控制系統時,對9.8kV 的母線電壓進行補償調節,將電壓調節到10kV-10.5kV 之間,其電壓經過調節后符合設定要求。當主變高壓側功率因數設定為0.93-0.98之間時,在沒有投入AVC 時,功率因數為0.90時,沒有進行補償;當AVC 投入運行時,將功率因數由0.90補償到0.93-0.98之間達到了預期的目的。
同時,電壓為10.1kV、功率因數為0.89,此時該調節區進入6區,由于采用了模糊控制的有效的控制了變壓器分接頭和電容器短時間內頻繁投切動作,避免了在6區時可能出現的振蕩現象,保證了電壓和無功在合格范圍內,達到了預期設計的效果。
5 結論
本文根據自動電壓控制理論,采用模糊控制理論,結合電壓控制中的11區圖,進行了基于模糊控制的電壓控制系統設計,仿真結果表明,在電壓和功率因數低于設計范圍時,能夠自動進行電壓調節和無功補償,達到設計要求,特別是在系統進行傳統控制的6區,易出現振蕩時,能夠采取有效措施,避免了系統出現振蕩現象,保證了系統的安全性、穩定性、可靠性,滿足了地調AVC 控制的要求,具有良好的推廣價值。
[1]石辛民,郝整清.模糊控制及其MATLAB 仿真[M].北京:清華大學出版社,2008.
[2]王立新.模糊系統與模糊控制[M].北京:清華大學出版社,2003.
[3]王士政.電力系統運行控制與調度自動化[M].北京:中國電力出版社,2008:132-150.
[4]王士政.電力調度自動化與配網自動化技術[M].北京:中國水利水電出版社,2006:188-203.
[5]陳衍.電力系統穩態分析[M].北京:中國電力出版社,2007:67-96.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:08
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
通信電源技術(2018年3期)2018-06-26 06:33:30
家庭影院技術(2017年9期)2017-09-26 03:41:45
現代工業經濟和信息化(2016年4期)2016-05-17 05:35:38
通信電源技術(2016年3期)2016-03-26 07:13:46