倉儲物流系統出庫方式研究及取出機構的數學模型建立
2014-12-04 07:51:36熊建華XIONGJianhua
價值工程 2014年36期
關鍵詞:物流
熊建華XIONG Jian-hua
(江蘇經貿職業技術學院,南京 211168)
(Jiangsu Institute of Commerce,Nanjing 211168,China)
1 倉儲物流結構組成及系統出庫方式
本文以中小型貨物為具體的研究對象,其自重為60g~350g,貨物的分布體積大致為110mm×70mm×20mm。傾斜的布置方式對于微型的自動或智能高速倉儲系統貨物出庫的取出機構設計較為適宜,因而,儲存貨架擬采用傾斜的布置方式。下面我們將根據倉儲物流的取出機構與倉庫存儲口兩者之間不同的對應關系逐一進行分析。
存儲與取出一一對應式指的是倉儲物流中的倉庫存儲口位置處僅設置一個取出機構,當貨架上的貨物處于靜止狀態時,只須憑借儲存貨架上安裝的固定擋軸即可實現貨物的安全定位,當運動的時候,則須憑借倉儲口處的取出機構來實現貨物的順利出庫,如圖1。
多存儲對一取出式指的是利用倉庫存儲口處單個取出機構一次性取出貨架上同一位置上的貨物。所有用于取出貨物的取出機構均水平分布于升降機上,當貨架上的貨物需要出庫時,貨架上貨物的行定位首先是升降機通過上下運動來實現,隨后再由水平分布于升降機上的取出機構完成貨架上貨物的列定位,當貨架上待出庫貨物位置確定以后,取出機構開始執行動作直至完成貨物出庫操作后返回。
多存儲對一取出式所對應的每個倉儲存口都與之對應有一個翻板,該翻板憑借安裝于儲存貨架架體上的扭簧所產生的扭轉力來實現貨架上貨物靜止時的定位。當貨架上的貨物需要出庫派送時,翻板通過克服扭簧產生的扭矩開始旋轉,最終使該出庫貨物層的貨物順利實現出庫動作。隨后,扭簧回到原始位置,后層貨架上的貨物被翻板擋住。
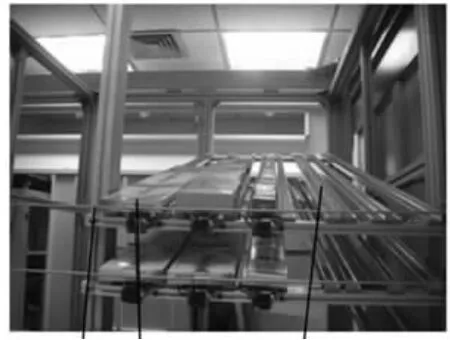
圖1 一一對應式取出示意圖
多存儲對多取出式指的是倉庫存儲系統中每一列或每一行倉庫存儲口共同使用相同的貨物出庫系統驅動,通過行列網點的交疊來最終確定貨架待出庫貨物的位置所在。多存儲對多取出式結構中同樣安裝有翻板裝置,但運行的機理和翻板的結構形狀都不甚相同。多存儲對多取出式可直接翻轉成直角,且翻板形狀為雙叉形,當貨架上的貨物能脫離翻板定位憑借自身重力實現自動出庫。
當貨架上的貨物處于不動狀態時,貨物的定位是依靠翻板在拉桿X 和Y 向上且與之對應向的銷共同作用下來實現的。當貨架上的貨物開始發生運動的時候,X 向拉桿在與之對應向驅動力的作用下實現貨物向左的運動,將對應向布置的銷從翻板上拉開,隨后貨物所在倉庫存儲口的Y 向拉桿與之對應向驅動力的作用下實現向下的運動,并將對應向布置的銷從翻板上放開,此時的翻板可在其自重和貨物沿貨架方向的滑動力共同作用下翻轉一直角角度,而貨架上的貨物則依靠沿貨架方向的滑動力順利出庫。當實現整體復位時,則按照運動的逆方向依次動作。
2 取出機構一般數學模型構建
上面對三種不同的倉儲物流系統貨架上貨物的放置方式均采用相同的斜置布置方式,故而可將貨架上的貨物抽離出來單獨作為研究對象來進行研究建模。其中,貨架上的貨物靜止不動時其受力分析示意圖如圖2 所示。

圖2 貨物靜止不動時受力示意圖
由圖2 及貨物受力平衡方程可得出:

其中,Fx和Fy分別為斜置儲存貨架沿斜面和垂直斜面方向上的力;G 為貨架上貨物自身的重力;f 為貨物與貨架間的接觸摩擦力;N 為貨架斜面的支撐力;F 為外力;θ為傾角。
由于貨物沿垂直于貨架方向無運動,故Fy向的合力為零。又可設貨物的滑動力為F′,即F′=Gsinθ-f,故式(1)可化簡為:

當Fx向的合力不大于零時,貨物靜止,當大于零時,貨物開始運動直至完成出庫動作。
3 取出機構不同出庫方式優缺點對比研究
經過不同的現場試驗表明:雖然上述三種不同的倉儲物流系統取出機構與倉庫存儲口對應方式都能很好地實現斜置貨架上的貨物順利實現出庫動作,但是根據不同的出庫要求仍存在部分差異。
從取出機構的一般的數學模型中,我們可知貨架上的貨物主要是通過重力分量來實現其出庫動作的。因而,Fx向合力的大小對倉儲整個系統的庫存和貨物出庫的可靠性起著至關重要的作用。
現以250g 質量的醫用藥品為具體事例,對上述不同的取出機構進行定量化研究分析。經不同的現場試驗發現,儲物貨架的斜置角度取14°~22°區間值時為最佳,本文暫選定θ=20°為參考值,接觸摩擦因數可取0.045。
在存儲與取出一一對應式中,貨物靜止不動時,力F=+∞,滑動力F′=Gsinθ-f=0.749N;貨物出庫時,力F=0,滑動力F′=Gsinθ-f 將逐漸變小,可得此時滑動力F′變小=0.0426N。兩種不同狀態對應的Fx向合力∑Fx為:

式中,∑Fx1為靜止沿貨架方向上的合外力;∑Fx2為貨物出庫時的合外力;F′小為傾角θ 由20°變小到10°所產生的滑動力。
在多存儲對一取出式中,貨物的定位是依靠扭簧所產生的的扭轉力來定位的,外力F>Gsinθ,此時F=1N。當貨物出庫時,扭簧所產生的的扭轉力由取出機構來克服,外力F=0N,此時,貨物抬高,傾角θ 將減小,滑動力=0.0426N。貨物靜止不動與出庫所對應的力學模型為:

在多存儲對多取出式中,貨物同樣是利用固定擋軸來實現定位,需施加的外力F=+∞,當貨物出庫時,此時不使用翻板,外力F=0N,傾角θ 不發生變化,滑動力仍為F′。貨物靜止不動與出庫所對應的力學模型為:

經式(3)~式(5)對比可發現,從功能等效和經濟性角度來看,多存儲對多取出式時所獲取出機構的可靠性最高。
4 結論
本文通過對三種不同取出機構性能優缺點的對比分析和現場試驗驗證,針對不同的倉儲物流系統來說,應合理選擇不同的取出機構,以取得更好的經濟和社會效益。
[1]張正義.自動倉儲系統及其應用[J].物流技術及應用,2006,11(7).
[2]曹彬.現代倉儲物流管理信息系統分析與設計[J].物流技術,2008,11(1).
[3]程娟,唐岫,倪鉉珣.現代企業倉儲物流的發展模式與對策[J].物流工程與管理,2013,35(6).
猜你喜歡
物流技術與應用(2021年11期)2021-12-27 05:17:08
物流技術與應用(2020年11期)2020-03-11 03:11:36
物流技術與應用(2020年10期)2020-03-10 06:06:12
物流技術與應用(2019年8期)2019-09-04 03:29:56
汽車觀察(2018年12期)2018-12-26 01:05:44
現代企業文化(2018年13期)2018-06-09 08:22:26
消費導刊(2018年8期)2018-05-25 13:20:16
中國公路(2017年6期)2017-07-25 09:13:58
大陸橋視野(2015年17期)2015-12-15 10:07:32
現代企業(2015年2期)2015-02-28 18:45:09