
基于SolidWorks的碼垛機器人機構設計與實現
2014-12-07 11:16:43王其林李倩孫潔
中國科技縱橫 2014年9期
王其林 李倩 孫潔
(山東省機器人與制造自動化技術重點實驗室,山東濟南 250014)
基于SolidWorks的碼垛機器人機構設計與實現
王其林 李倩 孫潔
(山東省機器人與制造自動化技術重點實驗室,山東濟南 250014)
隨著計算機輔助設計技術的不讀發展,各種三維設計軟件已得以廣泛應用,這為工程設計人員提供了一種有效的設計方法。SolidWorks軟件因其功能強大、易學易用和技術創新等特點迅速得以推廣,使得傳統的機械設計逐步向三維設計轉化。本文利用SolidWorks進行設計的基本過程和方法,完成了從三維實體造型到零部件的虛擬裝配,設計出了一種碼垛機器人機構的三維模型,并著重介紹了該款機器人的機械機構。為碼垛機器人產品開發提供參考,相比傳統的設計方式大幅度地提高了零件的設計水平和生產效率。
SolidWorks 碼垛機器人 機構設計
隨著經濟和科技水平的飛速發展,使得機器人在碼垛行業有著更加廣泛的應用。碼垛是物流自動化領域的一門新興技術,是將形狀基本一致的物料按照一定的碼放模式堆疊成垛,以實現物料的搬運、存儲、裝卸運輸等物流活動[1]。
伴隨著計算機應用技術的不斷發展,通過CAD/CAE技術進行機器人機構設計,進一步解決在機器人設計、制造和運行過程中的問題,已經變成了一種實用高效的設計方法[2]。這樣能夠有效地減少設計修改,從而大大降低了設計成本, 提高了設計質量,同時縮短產品開發周期。
本文首先介紹了SolidWorks軟件的強大功能,總結出了該利用該軟件進行零部件設計的過程和方法,接下來著重介紹了基于該軟件模式下設計的一種碼垛機器人機構,為今后的碼垛機器人研發工作提供了參考。
1 利用SolidWorks進行設計的基本過程和方法
由達索公司開發的SolidWorks是一款基于Windows操作平臺的三維CAD系統,具有功能強大、易學易用和技術創新三大特點,使得SolidWorks 成為領先的、主流的三維CAD解決方案[3]。在軟件中采用了全相關性設計技術,支持參數化和變量化技術,設計人員可以在設計的任何階段對不滿意之處進行修改,都可使裝配體和零件之間相互驅動以完成相關部分的改變。提供了特征管理技術,通過特征樹可以方便的管理設計過程并查詢編輯設計的各個步驟零件,它還可以動態模擬零部件裝配過程,它將2D繪圖與3D造型技術融為一體,直接可以出滿足生產和加工所需的二維工程圖。利用SolidWorks進行設計的過程和方法,其流程圖,如(圖l)所示。
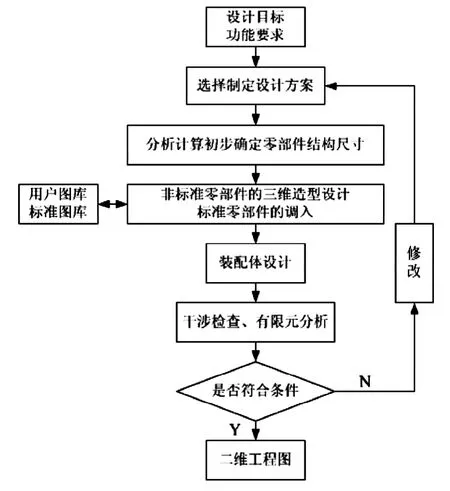
圖1 利用SolidWorks進行設計的流程圖
1.1 零件的三維造型設計和制作
零件的三維造型設計是SolidWorks軟件的基本功能之一,它是一種基于零件特征的建模方式,對于同一形體的零件,往往會有多種建模形式,因此,在實際建模過程中,我們要設定合理的設計變量,以便于零部件在裝配及優化時能夠方便快捷地進行修改。
1.2 部件及整機的模擬裝配
SolidWorks軟件不僅能解決一般的零部件設計問題,還可以處理系統級的大型裝配設計。在該系統下我們能清晰直觀地看到零部件的三維實體模型和裝配關系。SolidWorks的模擬裝配功能是:在裝配體模式下,將創建的零件三維模型按照零部件之間的連接方式及裝配關系,添加相應的裝配約束(如同軸、平行、重合等)進行模擬裝配[4]。具體操作時可以將所需零部件全部或部分插入后依次裝配,也可以插入一個裝配一個[5]。
1.3 裝配體的仿真運動及檢測
零部件在之前的模擬裝配過程中,SolidWorks已建立并記錄了裝配體各零部件之間的約束關系,使用該款軟件所提供的動態仿真插件,我們可以清晰直觀的查看裝配體的所有運動,也可以使零部件按設定的約束條件來進行各種仿真運動,并且可以對運動的零部件進行動態的干涉檢查和間隙檢測[6]。這樣可以使我們清晰直觀地知道零部件之間是否有干涉等現象,以便于能及時發現問題并解決問題。
2 碼垛機器人機構設計
我們所研制的碼垛機器人是基于solidworks三維設計軟件系統設計完成的,該款機器人的機械機構,如(圖2)所示。其主體機械結構是基于平衡吊原理而設計的平面四連桿機構,具有承載力大、穩定性好、結構緊湊、節省能耗等特點[7]。該機構主要有四個自由度組成,在四臺交流伺服電機控制作用下能夠實現四種運動:腰部關節的旋轉運動,后大臂上下運動,小臂前后運動和腕部的回轉運動四種運動,這四種運動的組合可以完成在機器人三維作業空間范圍內的物品搬運碼垛任務。
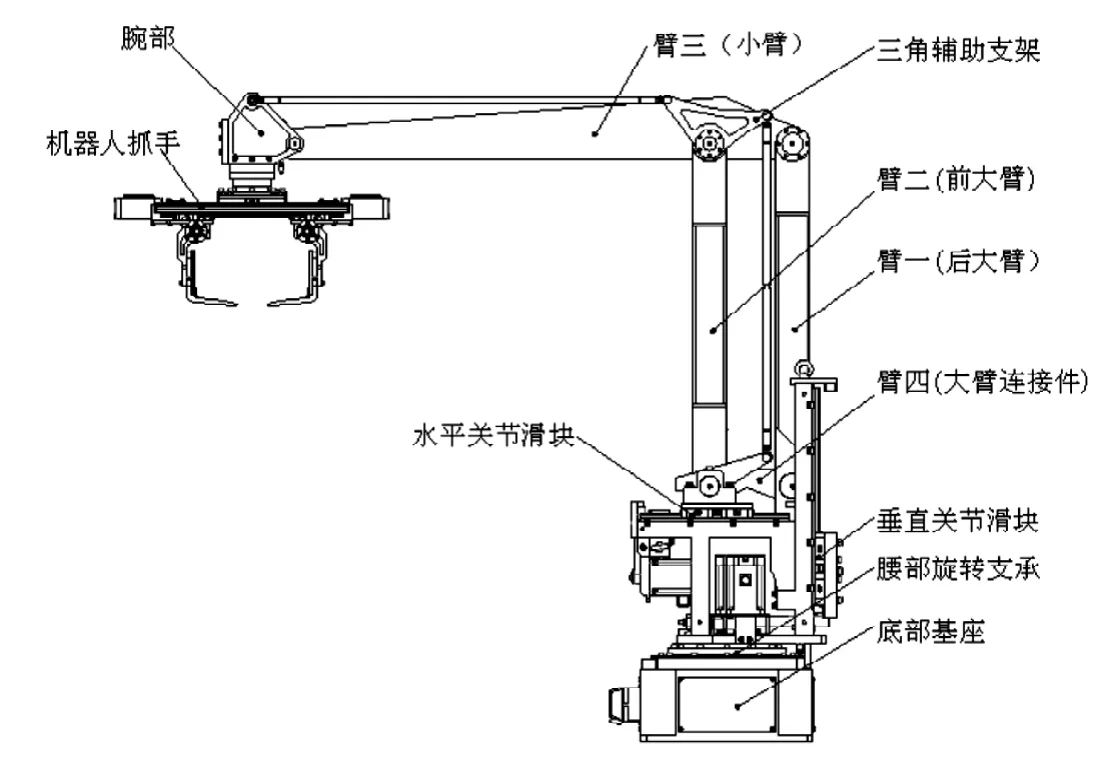
圖2 總體機械結構模型
2.1 平行四連桿機構的設計
平行連桿機構機械構圖,如圖3所示。其主架體是由臂一、臂二、臂三、臂四組成的四連桿機構。為使末端執行器始終與地面保持平行,我們引入了平衡桿機構,即平衡桿一和平衡桿二,它們通過連接三角板相接,平衡桿一下端再連接到平衡桿支座上。這樣抓手一經調平,在平衡桿的拉動下,即可始終處于水平狀態。

圖3 四連桿機構圖
為了能使水平滑板、垂直滑板能夠沿各自方向往復滑動,在這里我們使用了導軌和滑塊,滑板和滑塊用螺釘相連,在動力的作用下,四連桿機構可實現在水平及豎直方向上的復合運動。它是怎么實現的呢,我們在下文的水平及垂直關節的機構設計中加以敘述。
2.2 水平及垂直關節的機構設計
水平及垂直關節的機械構圖,如(圖4)所示。水平和豎直滑塊的移動帶動臂桿做回轉運動以分別帶動末端執行器沿水平方向和垂直方向俯仰,實現這兩個方向上的運動學解耦,且機構在垂直平面內形成一種放大機構[8],使其腕部在水平和垂直方向的位移僅分別于水平和垂直滑塊的相對位移成正比關系,以便于運動控制和操作。

圖4 水平及豎直關節的機械構圖
在水平和垂直方向上,我們使用的是伺服電機通過同步帶輪驅動動滾珠絲杠,滾珠絲杠上連接滑板,這樣就使伺服電機的圓周運動通過滾珠絲杠變成了直線運動,進而實現了由四連桿組成的機械臂在水平和垂直方向上做相應的運動。
2.3 腰部底座的機構設計
腰部底座的機構圖,如(圖5)所示。該機構主要主要由底座、減速機、回轉支承、回轉主架體等零部件組成。其動力傳遞是:伺服電機所提供的動力由輸入軸帶動減速機的高速軸轉動,其低速軸和底座上的連接法蘭盤相固定,這樣減速機的機殼就轉變為了動力輸出軸,經回轉支承、聯軸體后和回轉盤相連,回轉盤上安裝的是回轉主架體,從而使碼垛機器人主架體實現了腰部的回轉運動了。

圖5 腰部底座的機構圖
2.4 機器人腕關節及抓手的設計
機器人腕關節及抓手的機構圖,如圖6所示。主要由連接與機器人小臂轉軸的腕部支撐平臺及作為末端執行器的抓手組成。在腕部機構中,伺服電機輸出軸連接減速機,經減速增矩后能夠使位于其輸出法蘭上的機器人抓手按設定程序自由旋轉,從而實現腕部機構的回轉運動。抓手的機構,是以托舉為主、抓舉為輔一種結構形式。該機構通過電磁閥控制左右兩側氣缸活塞桿的伸縮,帶動兩側手抓的張開與閉合,以完成碼垛過程中抓放袋的工作任務。
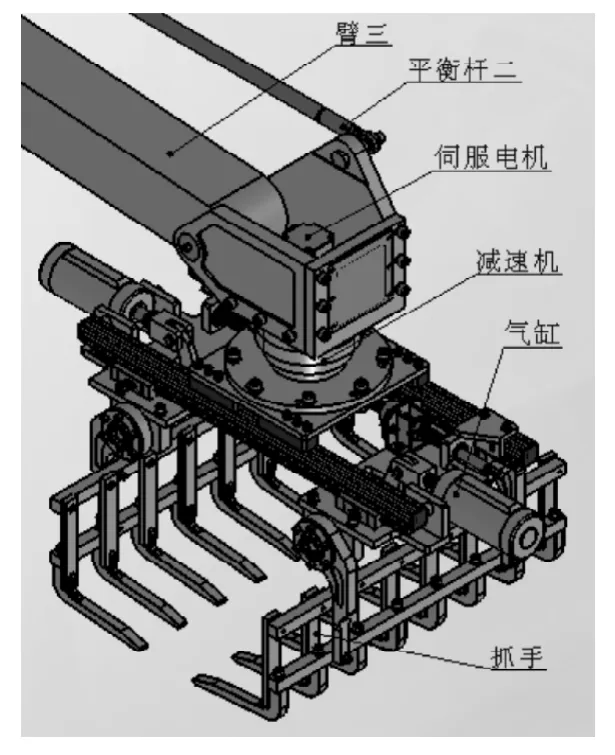
圖6 腕部關節及手爪機械構圖
3 結語
本文首先簡述了SolidWroks軟件的強大功能,總結出了利用該款三維設計軟件進行零部件設計的基本過程和方法,接下來著重介紹了使用軟件設計的一種碼垛機器人的機構,相比傳統的設計方式大幅度的提高了零件的設計水平和生產效率,為以后的碼垛機器人研發設計工作提供了一些參考。
[1]陳魁.基于馬爾可夫決策過程的碼垛機器人路徑規劃研究[D].南京航空航天大學,2012.
[2]陶永.基于CAD/CAE的工業機器人設計開發平臺[J]機器人技術與應用,2013(2).
[3]付鵬.基于模塊化的堆垛機快速設計系統研究與實現[D]中北大學,2010.
[4]陳芳.SolidWorks軟件在機械類畢業設計中的應用[J].河北科技師范學院學報,2006(4).
[5]詹才浩.SolidWorks應用教程[M].北京:清華大學出版社,2008.
[6]刑啟恩.SolidWorks工業設計與案例精粹[M].北京:機械工業出版社,2007.
[7]孫潔等.四軸碼垛機器人的機構設計及運動分析[J].山東科學,2011(1).
[8]薄少軍,李云江等.優化設計在噴槳機器人研制中的應用[J].中國制造業信息化,2006(8).
猜你喜歡
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
火花(2019年12期)2019-12-26 01:00:28
人大建設(2019年12期)2019-05-21 02:55:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
學苑創造·A版(2015年11期)2016-01-14 09:03:27
中國火炬(2010年8期)2010-07-25 11:34:30
