基于Google地圖數(shù)據(jù)的可視化無人機(jī)航線規(guī)劃研究
2014-12-12 01:47:10李秀麗
測繪通報 2014年1期
關(guān)鍵詞:設(shè)計
李秀麗
(福建省測繪院,福建 福州350003)
一、引 言
航測成圖是獲取高分辨率影像資料的一個重要來源,航攝飛行是航測成圖的關(guān)鍵步驟,而航線的規(guī)劃工作則是決定航空拍攝任務(wù)完成質(zhì)量的關(guān)鍵因素。現(xiàn)行的無人機(jī)飛行控制軟件UP-30具有繪制航線的功能,但是其功能單一,操作復(fù)雜。在外業(yè)操作過程中,底圖信息不足、屏幕反光、數(shù)據(jù)計算不便等因素,嚴(yán)重影響著作業(yè)的效率和質(zhì)量。本文根據(jù)存在的問題,提出以Google地圖影像和DEM數(shù)據(jù)為基礎(chǔ),依據(jù)測區(qū)的范圍,使用循環(huán)算法自動求解出航點坐標(biāo),并且一鍵式導(dǎo)入飛控系統(tǒng)UP-30,以指導(dǎo)飛行作業(yè)(如圖1所示)。
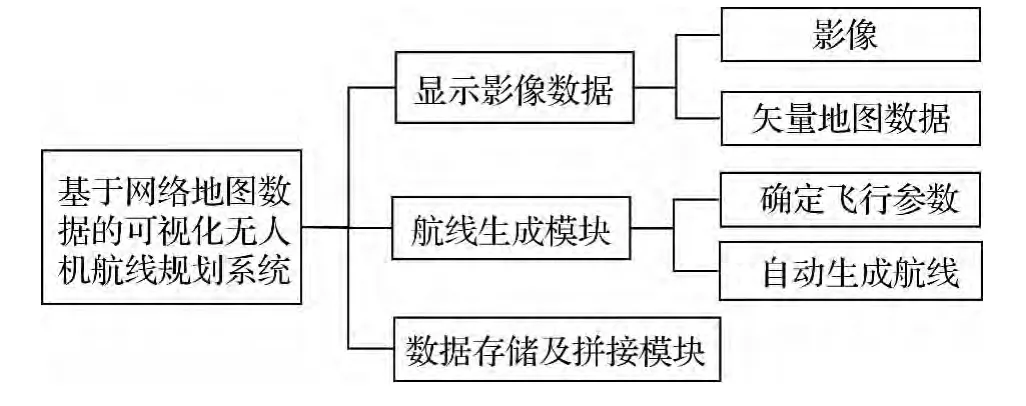
圖1 模塊組成
二、影像數(shù)據(jù)的獲取
在沒有已知底圖數(shù)據(jù)的情況下,可以從Google Earth上下載影像數(shù)據(jù)。GetScreen軟件下載衛(wèi)星影像是按網(wǎng)格下載,可以設(shè)置截屏的高度,并進(jìn)行自動拼圖。Google Earth空間參考系為改良的UTM投影,但是GetScreen軟件沒有考慮投影關(guān)系,因此在下載大區(qū)域圖像拼接時會產(chǎn)生錯位,需要進(jìn)行幾何糾正以保證坐標(biāo)信息的正確性。通過試驗,筆者認(rèn)為下載影像時以下設(shè)置會減少錯位現(xiàn)象:
1)在Google Earth的“層設(shè)置面板”中取消“地形”選項。
2)打開“工具”下拉菜單的“選項”,選中“Direct X”和“安全模式”。
3)由于屏幕刷新需要時間,可增加延遲時間,一般不大于1000 ms。
4)先啟動Google Earth,可再啟動GetScreen。
5)GetScreen截屏高度的校正。應(yīng)用GetScreen軟件把Google Earth全幅截屏到窗口,原來1024 dpi的圖像被壓縮到722 dpi的窗口中,于是就產(chǎn)生了一個倍率壓縮。截屏后獲得的圖像看上去比在Google Earth中同高度看到的要小,需要在截屏?xí)r根據(jù)二者的差值作校正,即校正系數(shù)為722/1024=0.705,也就是

三、飛行參數(shù)
飛行參數(shù)是航線設(shè)計的基礎(chǔ)資料,是底圖數(shù)據(jù)之外的又一大模塊,參數(shù)的自動計算能減少外業(yè)人員的計算量。在知道目標(biāo)參數(shù)后,首先確定飛行高度。設(shè)目標(biāo)像素的大小為P0,像元大小為P,則f/H=P/P0,進(jìn)一步解得相對航高H=fP0/P。各個參數(shù)的計算公式如下
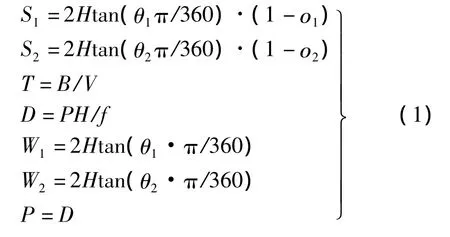
式中,f為鏡頭長度;P為像元大小;H為相對航高;θ1為平行飛行方向視場角;θ2為垂直飛行方向視場角;o1為航向重疊度;o2為旁向重疊度;S1為相鄰航線間隔;S2為曝光間隔;T為等時曝光時間;V為飛行速度;D為地面分辨率大小;W1為地面幅面寬;W2為地面幅面高。
四、航線設(shè)計
1.地形起伏的影響
地形起伏會直接影響航片重疊度。根據(jù)式(1)可得,在航線間隔和視場角不變的情況下,H越小,o1和o2值越小。重疊度在低空航測系統(tǒng)中是一個很重要的概念,它對航測的很多環(huán)節(jié)都有影響。
(1)重疊度與相對定向精度的關(guān)系
分別對不同重疊度的影像進(jìn)行相對定向點的采集,見表1。從表1可以看出,隨著航向重疊度的增加,相對定向的中誤差逐漸減小;多余的觀測數(shù)越多,結(jié)果的精度及可靠性就越高。
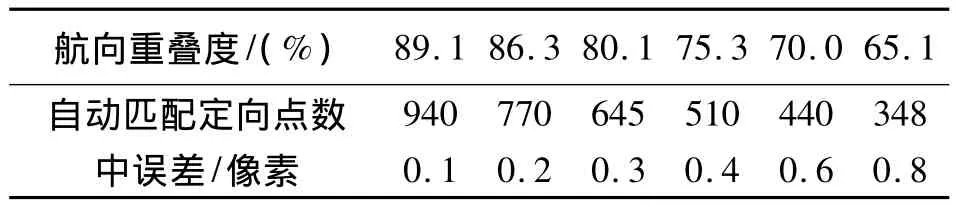
表1 航向重疊度和匹配點數(shù)及中誤差的關(guān)系
(2)重疊度與匹配的難易程度的關(guān)系
利用金字塔影像相關(guān)技術(shù)和最大相關(guān)系數(shù)法識別同名點對,在剔除粗差的同時求解未知參數(shù)。重疊度小的相鄰影像間的差異可能很大,匹配難度增加;重疊度大的影像差異小,匹配容易。當(dāng)重疊度較小時,受高差的影響,幾何變形比較嚴(yán)重,增加了匹配的困難性[1];重疊度越大,交會角越大,提高了高程和平面方向的交會精度,并增加了結(jié)果的可靠性,可滿足高精度三維重建和其他應(yīng)用的需要[2]。
基于重疊度的重要性,在航線設(shè)計產(chǎn)生航點之后,導(dǎo)入DEM數(shù)據(jù)進(jìn)行地形檢查很有必要。在檢查之前先根據(jù)式(1)確定航高的臨界值。通常無人機(jī)航拍的航向重疊度不得少于80%,旁向重疊度不得少于60%,這可根據(jù)后處理軟件的性能和經(jīng)驗值而定。設(shè)o11和o22分別為航向重疊度和旁向重疊度的臨界值,則 o11≥o1,o22≥o2,推導(dǎo)而知
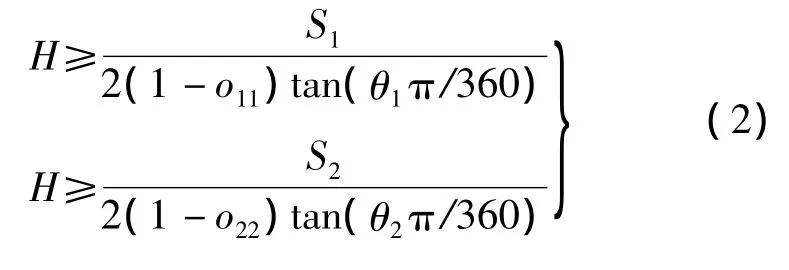
H能取得的最小值作為航高的臨界值H1,則某點的高程值h≤H-H1。取高程值的臨界值為h1,當(dāng)高程值大于h1時,增加航點,且航高改變?yōu)镠+h。
綜上所述,航線設(shè)計需要綜合考慮地形地貌、續(xù)航時間、測區(qū)面積等因素,合理地劃分架次,還需外業(yè)踏勘選準(zhǔn)起飛點,適合在開闊、信號干擾少地區(qū)選取,而后為每個架次設(shè)計曝光點。
2.航線的自動化生成思路
航線設(shè)計中需要考慮的主要問題是影像的獲取和結(jié)果如何導(dǎo)入UP-30,其中起到串聯(lián)作用的是MapInfo軟件。運用基于MapInfo的二次開發(fā)語言MapBasic可避免利用其他語言可能造成的問題,如坐標(biāo)系轉(zhuǎn)換、配準(zhǔn)、文件格式的轉(zhuǎn)換等。利用Map-Info自身的配準(zhǔn)及坐標(biāo)系,產(chǎn)生的航線作為單獨的圖層存儲,生成之后將其作為航線層導(dǎo)入UP-30進(jìn)行導(dǎo)航。
3.航點具體求解的方法
生成航線的具體步驟是:①測區(qū)的繪制;②飛行參數(shù)的輸入;③產(chǎn)生航點數(shù)據(jù)。系統(tǒng)能夠根據(jù)作業(yè)的具體要求,自動計算出飛行航點,以指導(dǎo)飛行作業(yè)。假設(shè)飛行區(qū)域為 P1、P2、P3、P4、P5、…、Pn,n為測區(qū)的角點數(shù)目。計算過程中假設(shè)經(jīng)度方向為X軸,緯度方向為 Y軸,經(jīng)緯度以度的形式表示,如圖2所示。

圖2 航點坐標(biāo)解算示意圖
算法的實現(xiàn)過程如下:
1)首先應(yīng)用ObjectNodeX和ObjectNodeY函數(shù)讀出測區(qū)角點坐標(biāo),根據(jù)所需已知數(shù)據(jù)解求航線間隔D、基線長度、斜率 K、X最大值 Xmax、X最小值Xmin、Y 最小值 Ymin。
2)為了保證測區(qū)每一塊都在航線內(nèi),使X1=Xmin-(Xmax-Xmin)/2。
3)由P點坐標(biāo)和斜率K求直線0的方程。此方程交 L 線于 D0(XD0,YD0),即

4)由D0坐標(biāo)及相鄰航線間隔求航線1的方程,需要實現(xiàn)米和度之間的換算。
a.如果是在同一緯線上,則兩點間的距離=經(jīng)度差×111×cos(緯度),單位為km。
b.如果是在同一經(jīng)線上,則兩點間的距離=緯度差×111,單位為km。
采用距離分量的方法計算D1點的坐標(biāo)。把相鄰航線間隔分成X、Y方向的兩個分量,用ΔX和ΔY分別表示X及Y方向的距離量,用θ表示傾斜角,K存在時,有:
當(dāng)K>0時
當(dāng)K<0時

5)由D1點坐標(biāo)及航線斜率K求航線的方程。
6)遍歷測區(qū)的各個邊,求航線方程和邊的交點,并判斷交點是否在邊線段內(nèi),如果在則交點為航點初值。
7)把航點初值向外拓展一個基線的長度,獲得航點坐標(biāo)。
8)重復(fù)以上步驟4)和5)分別求得每條航線上兩端的航點,并判斷YDn,當(dāng)YDn<Ymin時,退出循環(huán)。
9)特殊情況下,當(dāng)K不存在時,航線方程沿著X軸向外拓展,航點求法不變。
五、結(jié) 論
在UP-30中,航線的設(shè)計是根據(jù)起始航點確定航線的長度及方向,已知航線間隔和航線的條數(shù),在選定轉(zhuǎn)向的條件下自動生成平行等長的航線。這種設(shè)計方法的一個缺點就是航線沒有根據(jù)測區(qū)的實際情況而定,在一些邊緣地帶存在不必要的飛行區(qū)域,浪費了飛行時間和資源,原設(shè)計方式如圖3(a)所示,改良后的航線如圖3(b)所示。
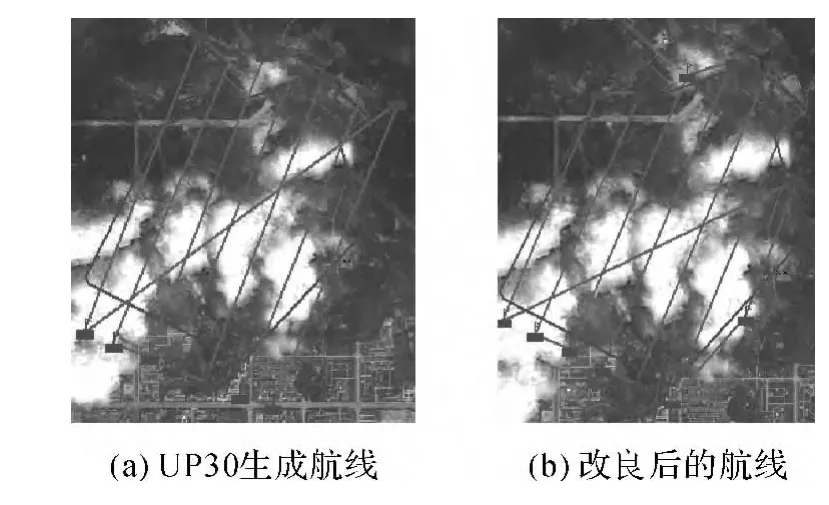
圖3
改良后,相比于以前的航線設(shè)計優(yōu)點有:
1)航線根據(jù)測區(qū)的邊界而定,除去了因航線規(guī)整化下多余的拍攝,提高了航片的可用性。
2)傳統(tǒng)作業(yè)模式下航線設(shè)計于紙質(zhì)圖上,外業(yè)需要重新繪制。本系統(tǒng)中航線的設(shè)計直接在電子地圖上完成,可以直接導(dǎo)入飛控系統(tǒng)并應(yīng)用,減少了外業(yè)工作的繁雜度。
3)相比于傳統(tǒng)航線的設(shè)計,本系統(tǒng)自動化更高,直接人工操作更少,符合自動化作業(yè)的理念與趨勢。
[1]崔紅霞,林宗堅,孫杰.大重疊度無人機(jī)遙感影像的三維建模方法研究[J].測繪科學(xué),2005,30(2):36-38.
[2]張永軍,張勇.大重疊度影像的相對定向與前方交會精度分析[J].武漢大學(xué)學(xué)報:信息科學(xué)版,2005,30(2):126-130.
[3]巴海濤.無人機(jī)航跡規(guī)劃方法研究[D].西安:西北工業(yè)大學(xué),2006.
[4]梁偉,李新國.基于數(shù)字地圖預(yù)處理的低空突防航跡規(guī)劃[J].飛行力學(xué),2008,26(4):81-85.
[5]杜萍,楊春.飛行器航跡規(guī)劃算法綜述[J].飛行力學(xué),2005,23(2):10-14.
[6]崔紅霞,林宗堅,孫杰.無人機(jī)遙感監(jiān)測系統(tǒng)研究[J].測繪通報,2005(5):11-14.
[7]馬輪基,馬瑞升,林宗堅,等.微型無人機(jī)遙感應(yīng)用初探[J].廣西氣象,2005,26(A01):180-181.
[8]崔營營,張愛武,王書民,等.無人飛艇航空遙感系統(tǒng)的研究[J].測繪通報,2010(S0):268-271.
[9]朱洋波,焦健,曾琪明,等.航空遙感任務(wù)規(guī)劃系統(tǒng)設(shè)計及航線設(shè)計方法研究[J].測繪通報,2007(8):16-19.
[10]郝斌,方學(xué)東,唐羽.數(shù)字航圖在航線設(shè)計中的應(yīng)用[J].中國民航飛行學(xué)院學(xué)報,2010,21(1):15-17.
[11]王東亮,萬幼川,徐景中,等.基于 DEM的機(jī)載Li-DAR 航線設(shè)計[J].測繪科學(xué),2011,36(1):116-118.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
