北斗與GPS雙系統測姿研究
2014-12-12 01:47:36白征東
測繪通報 2014年2期
關鍵詞:系統
邵 奎,白征東
(清華大學土木工程系,北京100084)
一、引 言
姿態測量作為導航系統的一個重要應用,已有的理論和算法都比較成熟。GPS作為最重要的數據源,在精度和實用性方面已經得到充分驗證,北斗作為新興的GNSS系統,以其作為數據源將成為必然趨勢。然而,其在載體測姿方面,國內鮮有學者對其精度和穩定度作過詳細研究。
本文使用北斗數據作為數據源求解載體姿態,在試驗處理中,使用同源GPS數據對姿態進行解算,并將兩者的結果進行對比分析,得出北斗系統作為數據源在姿態解算應用上的可行性和精度信息,進一步分析表明,北斗數據解算結果無論精度還是穩定度都不輸于GPS系統,甚至在一些情況下優于GPS系統。
二、數據模型和算法
姿態角求解的核心是坐標系的旋轉變換,站心直角坐標系到載體坐標系的變換可以通過繞坐標軸的3次旋轉實現,3次的旋轉角分別為偏航角(yaw)、俯仰角(pitch)和翻滾角(roll),旋轉后的站心直角坐標系和載體坐標系重合。
本文使用3臺接收機構成雙基線同時求取3個姿態角。實際中可根據不同情況選擇不同的接收機位置,不同的位置選擇將直接影響到計算模型和姿態角求取公式的不同[1]。本文中,主接收機位于載體坐標系原點,從1接收機位于載體坐標系Y軸,從2接收機位于XOY平面,與Y軸夾角為θ。
目前的姿態算法可分為兩類,即基于基線求解的姿態算法和基于濾波的姿態算法。基于基線求解的姿態算法又可以分為直接法、姿態矩陣最小二乘法和姿態角最小二乘法。其中,直接法因其簡單有效獲得了廣泛應用,本文采用直接法求取姿態角[2]。
載體坐標系到站心坐標系的轉換可用如下公式表示

式中,Xl為站心坐標系坐標,由空間直角坐標旋轉得到,見式(2)。Xb為載體坐標系,是固定值,不隨時間改變,根據本文試驗接收機位置,其具體形式見式(3)
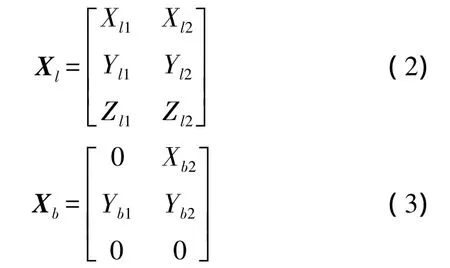
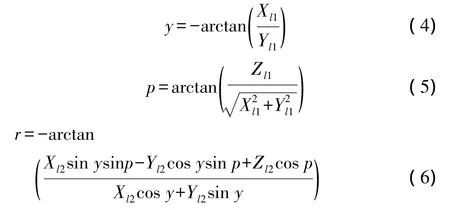
式(1)中未知量為y、p、r 3個姿態角,將式(2)和(3)代入式(1)中,進行矩陣相乘后,可以得到
三、試驗及結果分析
為了得到北斗數據在姿態解算上的可行性和精度,本文設計了試驗加以求解。為了獲得穩定姿態角預期,試驗以靜態方式進行。本文使用BD/GPS雙系統接收機同時采集數據,然后分別進行測姿處理,最后進行對比分析。在處理方法上,采用雙差kalman濾波求解基線[3],其他誤差,如對流層和電流層誤差,采用相同算法和處理模型[4],具體見表1。
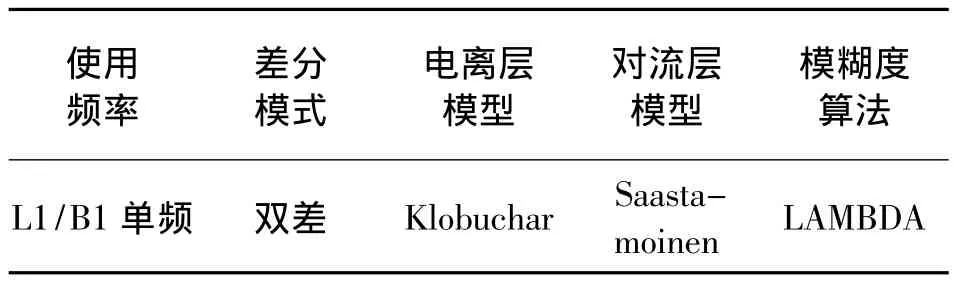
表1 程序參數設置
1.試驗結果對比
下圖中,為了有效地顯示,剔除了整周模糊度未固定之前的數據,以下各圖均從開始觀測后的兩百個歷元起始。
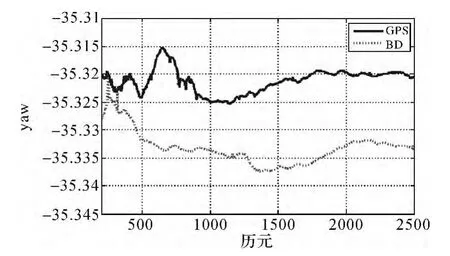
圖1 北斗與GPS系統YAW解算結果
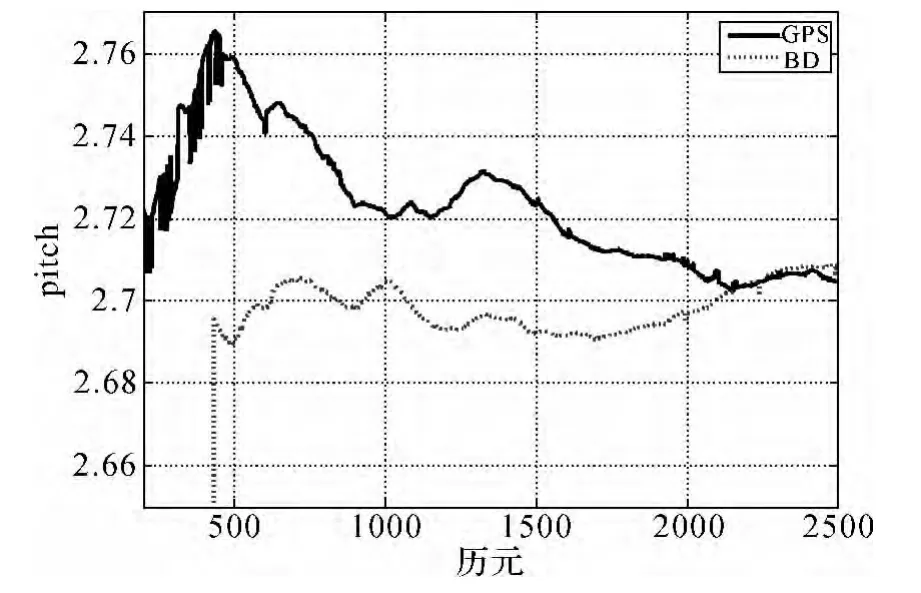
圖2 北斗與GPS系統PITCH解算結果

圖3 北斗與GPS系統ROLL解算結果
解算結果統計信息如表2所示,表中分別列出測量平均值、標準差、數據剔除率和最大誤差[5]。平均值的差異表現出兩系統結果的系統差異,標準差的對比顯示了系統測量的穩定程度,數據剔除率顯示了測量數據的有效性,最大誤差在一定程度上能夠反映測量數據粗差情況。

表2 試驗統計數據(°)
表2中同一組數據里前者為北斗結果,后者為GPS結果。
數據淘汰率是以所有觀測數據為樣本,求取中誤差,極限誤差選取3倍中誤差,落在極限誤差外的數據視為無效數據,進行淘汰,數據淘汰率是淘汰數據占全部數據的比率[6]。
為了更清查表達兩系統解算結果的差異,將GPS的解算結果同北斗解算結果做差,得到偏航角yaw、俯仰角pitch和翻滾角roll在對應歷元下的差異,用圖表示如下。
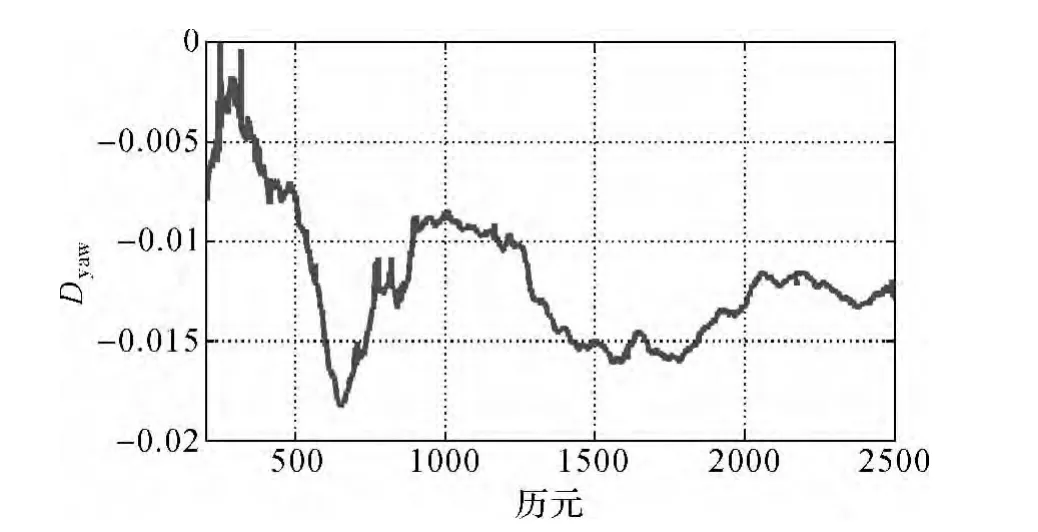
圖4 YAW結果差異圖
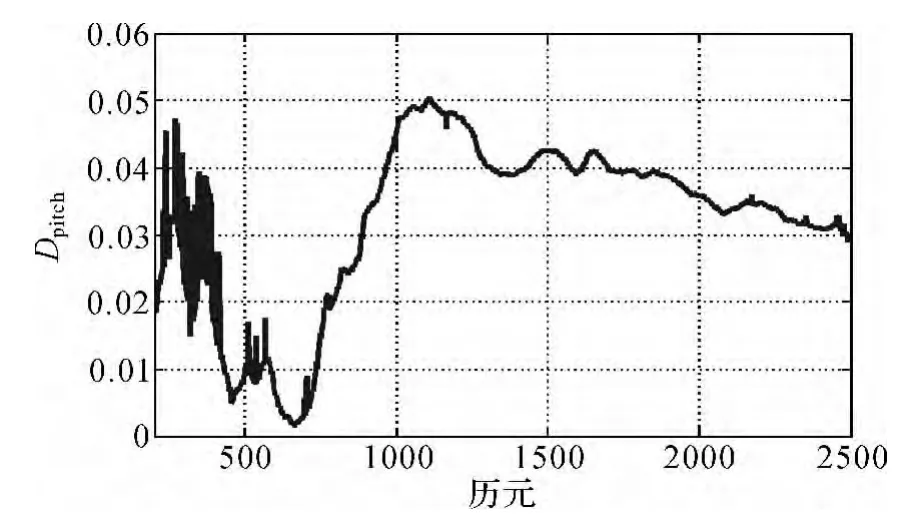
圖5 PITCH結果差異圖
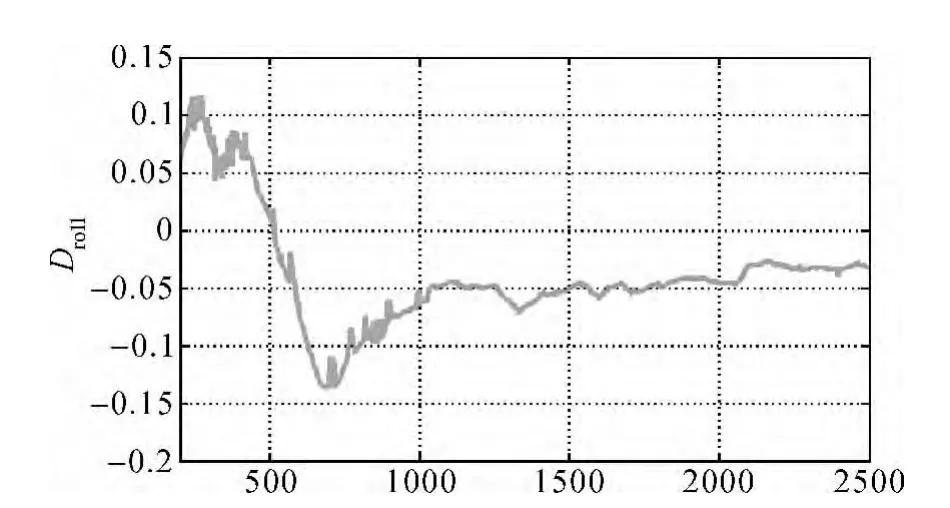
圖6 ROLL結果差異圖
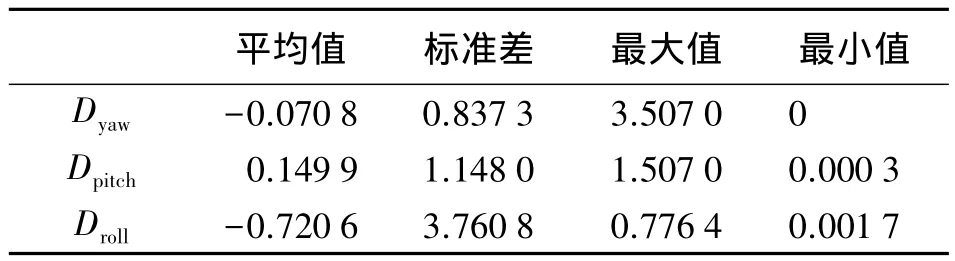
表3 姿態角差值統計信息(°)
2.試驗結果分析
根據誤差傳播定律和姿態角計算公式,偏航角yaw、俯仰角pitch和翻滾角roll誤差應依次遞增,姿態角對應的兩系統的差值和標準差也應依次遞增,這與表2和表3中結果相符[7]。
分析表2,北斗系統的yaw、pitch和roll標準差分為 0.039 6°、0.207 5°和0.530 3°,而 GPS 系統的對應值分別為 0.258 7°、0.152 8°和0.629 6°,可以看出,北斗在偏航角和翻滾角解算上穩定度略高于GPS,俯仰角穩定性稍弱GPS,但總體相差并不大,穩定性相當。
在最大誤差方面,北斗數據的yaw、pitch和roll分別為 1.168 1°,3.038 0°和4.350 2°。對應的 GPS最大誤差分別為 1.835 7°、1.384 8°和6.189 0°,最大誤差受到觀測條件和偶發事件的影響較大,具有較大不確定性,但仍能夠反映兩系統控制粗差的能力,從上述數據看,兩系統粗差相當,且北斗系統略優于GPS系統。
在數據淘汰率方面,北斗數據的偏航角、俯仰角和翻滾角分別為 2.887 9°、0.770 1°和2.733 9°。對應GPS 的三姿態分別為 1.116 7°、1.771 3°和1.039 7°。數據剔除率是有效數據所占的比例,反映了觀測數據的質量,從以上數據分析,北斗系統的偏航角和翻滾角剔除率是GPS系統的兩倍左右,而俯仰角則優于GPS,但總體上看,GPS系統優于北斗系統。
分析表格3,差值平均值能夠反映兩系統的系統差值,從表中可看出,翻滾角的差值最大,為-0.720 6°,在0.01弧度級別上。無論觀察試驗圖形還是上表中的統計數據,可以發現,北斗與GPS系統具有明顯的系統差異,但差異均不超過百分之一弧度級別。
3.補充試驗
接收機接受衛星信號受到觀測時間、觀測地點、觀測環境等影響,分析一次觀測結果所得到的結論不能不具有充足的可信性,為了驗證上面的試驗結果分析,作者先后不同時間,不同地點進行了3組重復的試驗觀測,試驗結果如下表所示。

表4 補充試驗1統計結果(°)

表5 補充試驗1差分統計結果(°)

表6 補充實驗2統計結果(°)

表7 補充試驗2差分統計結果(°)

表8 補充試驗3統計結果(°)

表9 補充試驗3差分統計結果(°)
受觀測條件和時間等的影響,補充試驗所得數據精度和穩定度變動較大,同原試驗中的結果存在差異。上文中的每一項具體試驗結果分析不一定能夠在補充試驗中得到證明,如原試驗中俯仰角pitch的北斗數據標準差大于GPS數據標準差,但在補充試驗1和補充試驗2中則正好相反。
但通過上表分析可知,某一項具體統計信息的優劣具有隨機性,不同的試驗可能得到不同的結果。但所有試驗分析結果都顯示,兩個系統所得的3個姿態角的各項數值標準均在同一個數量級上,并隨著不同的試驗而呈現隨機的變化。這表明,在載體測姿應用中,北斗系統在精度、穩定度和控制粗差等方面性能均可以達到GPS系統級別,甚至在一些情況下優于后者。
四、總 結
北斗作為我國獨立的衛星導航系統,將其作為載體姿態測量的數據源具有巨大戰略意,同時,其獨特的衛星系統設計使得在我國領土內信號具有更好的覆蓋和強度,使用北斗作為數據源具有必然性。
本文對雙基線直接法測量載體姿態進行了理論公式推導,為了得到北斗測姿的精度和穩定度等信息,設計并實施了4組試驗,通過對試驗進行統計,得到如下結論:
1)對于3個姿態角,北斗和GPS系統在精度、穩定度和控制粗差能力等指標的優劣具有隨機性,在不同試驗中會得出不同結果。
2)姿態角各項數據指標優劣具有一致性。對于具體某一次試驗,3個姿態角會呈現相同趨勢,比如原始實驗中北斗系統統計結果中偏航角、翻滾角標準差優于GPS系統統計結果,而俯仰角則較差,那么其他指標,如數據剔除率,基本會表現出同樣情況。
3)所有試驗結果都表明,在載體測姿應用中,北斗系統在精度、穩定度和控制粗差等方面性能均可以達到GPS系統級別,甚至在一些情況下優于后者。
[1]HOFMANNWB,LICHTENEGGERH,WASLEE.GNSS:Global Navigation Satellite Systems:GPS,GLONASS,GALILEO,and More[M].Berlin:Springer,2008.
[2]王潛心.機載GPS動態定位定速與定姿理論研究及軟件開發[D].長沙:中南大學,2011.
[3]TAKASU T,YASUDA A.Kalman-filter-based Integer Ambiguity Resolution Strategy for Long-baseline RTK with Ionosphere and Troposphere Estimation[C]∥Proceedings of the 23rd International Technical Meeting of the Satellite Division of the Institute of Navigation.Oregon:[s.n.],2010.
[4]LI Y,ZHANG K,ROBERTSC,et al.On-the-fly GPS-based Attitude Determination Using Single-and Doubledifferenced Carrier Phase Measurements[J].GPS Solutions,2004,8(2):93-102.
[5]CHEN W,QIN H.New Method for Single Epoch,Single Frequency Land Vehicle Attitude Determination Using Low-end GPS Receiver[J].GPS solutions,2012,16(3):329-338.
[6]TEUNISSEN P,GIORGI G,BUIST P J.Testing of a New Single-frequency GNSS Carrier Phase Attitude Determination Method: Land, Ship and Aircraft Experiments[J].GPSsolutions,2011,15(1):15-28.
[7]陳楊,唐艷,周偉,等.三天線GPS姿態解算誤差分析[J].全球定位系統,2012,37(3):16-18.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
