近景攝影測量技術在三峽庫區消落帶土壤侵蝕調查中的應用
2014-12-12 01:47:34胡云華鮑玉海賀秀斌
測繪通報 2014年2期
胡云華,鮑玉海,賀秀斌,王 蕾,甄 艷
(1.四川省第三測繪工程院,四川成都610500;2.中國科學院水利部成都山地災害與環境研究所,四川成都610041)
一、引 言
水庫消落帶是指由于水位季節性漲落而使水庫周邊被淹沒土地周期性出露水面的一段特殊區域,通常指水庫最低水位線至最高水位線之間的地貌單元,是水陸生態系統的交錯地帶。三峽工程是當今世界最大的水利樞紐工程,建成蓄水以后,在庫區形成一個最高水位175 m、最低水位145 m,垂直落差達30 m的消落帶[1-2]。消落帶邊坡受干濕交替的周期性影響,在波浪淘蝕和降雨徑流沖刷的共同作用下發生嚴重的土壤侵蝕[3-4]。微地貌掃描是監測三峽庫區消落帶地表變形、揭示土壤侵蝕過程的重要手段。由于消落帶地貌發生變化的機理復雜多樣,面積巨大,使用傳統的RTK、全站儀、經緯儀等對進行地貌監測不僅工作量巨大,而且很難滿足地表變形監測的數據需求。雖然可以使用三維激光掃描儀進行地貌掃描,但是三維激光掃描儀成本高昂,很難在庫區大面積使用。
近景攝影測量是攝影測量的一個重要分支,主要研究近景物體的三維構建,地形測量等[5]。隨著攝影測量軟件數據處理功能的不斷強大,使用傳統的非專業攝影測量相機也能完成影像的采集工作,尤其是近年來國產數字攝影測量軟件的不斷成熟,大大降低了該方法的使用成本,使得最新的數碼攝影測量技術通過一定的技術設計,既能滿足平面精度要求,又可能在高程上達到變形觀測的特殊要求[6-7]。楊化超等曾使用數字近景攝影測量技術進行礦山地表沉陷監測應用研究[8];Thomas等人采用專業量測相機將數字近景攝影測量技術用于大壩的變形監測[9];石必明等人將非量測數字相機數字化近景攝影測量技術用于沉陷模型的試驗觀測[10]。但在消落帶土壤侵蝕研究領域,近景攝影測量技術還鮮有應用,三峽庫區消落帶面積大,地形復雜,使用普通數碼相機近景攝影測量技術對三峽庫區消落帶進行地形數據獲取具有廣闊的應用前景。
本研究利用基于普通單反相機的近景攝影測量技術對三峽庫區消落帶進行三維建模,并利用全站儀測量驗證點來計算三維建模的精度,以驗證本研究所使用的近景攝影測量技術在消落帶土壤侵蝕監測中的實用性。
二、研究區概況
研究區位于重慶涪陵區清溪鎮境內(緯度:29.715 271 ~ 29.739 929;經 度:106.944 702 ~106.962 524),如圖1所示。水位在145~175 m 波動,最低水位145 m出現在每年汛期(6—9月),最高水位出現在非汛期,達175 m。研究區坡度10°左右,土壤質地以砂質為主,只在6—9月出露。出露后,正值暴雨集中期,由于天氣炎熱潮濕,大雨、暴雨頻繁,容易形成坡面侵蝕。同時在風和船舶的作用下形成的波浪也會對消落帶進行沖刷,因此研究區土壤侵蝕是在波浪和地表徑流共同作用下的一種特殊的土壤侵蝕形式。本研究選取研究區內兩條侵蝕溝作為研究對象,編號分別為1號溝和2號溝。1號溝溝長3.54 m,平均寬度 0.58 m;2 號溝長 1.95 m,平均寬度 0.42 m。
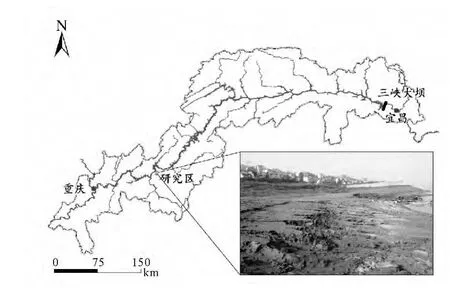
圖1 研究區地理位置圖
三、數據獲取
1.試驗設備
試驗中使用的相機Canon EOS 5D Mark II是一款高性能數碼單鏡頭反光自動對焦相機,配備有2110萬有效像素的全畫幅CMOS感應器,相機鏡頭另配備24~105 mm f/4L USM鏡頭,控制點測量使用南方NTS-360R激光免棱鏡全站儀。
本研究使用中國測繪科學研究院研發的高分辨率遙感影像一體化測圖系統PixelGrid作為數據處理軟件。該軟件具有非量測相機影像畸變差改正,同時完成影像旋轉的功能;該軟件還可以針對非航空攝影測量影像重疊度不夠規則、像幅較小、相片傾角過大且傾斜方向沒有規律等特點,采用基于尺度/旋轉不變特征和多基線影像匹配技術的全自動鏈接點選取配準等功能[11]。
2.數碼相機檢校
普通的數碼相機的主距f和像主點在像片中心坐標系里的坐標(x0,y0)都是未知的,根據影像無法直接量測以像主點為原點的坐標,必須進行內定向。同時非量測相機的鏡頭畸變差較大,這是因為透鏡成像時,視場的不同區域所形成的影像放大率不同而產生扭曲,屬于一種影像的幾何失真,這種扭曲或失真在越靠近影像邊緣的地方就越嚴重。為了恢復每張影像攝影中心與像片之間的相對幾何關系,提取光學畸變系數,以獲得非測量相機攝影測量處理的必要參數,數碼相機的校驗工作必不可少[12-13]。
根據所需要使用的硬件條件,數碼相機的檢校的方法主要可以分為:基于標準參照物的方法、自檢校和基于主動視覺的檢校方法。相機的檢校需要專業的三維控制場和二維控制場,在測量區域內,安設控制點,利用全站儀輔助測量控制點的幾何坐標,將幾何坐標帶入圖像,可以求解相機形變參數并對影像進行幾何校正。在本研究過程中,由于沒有設置專門的校驗場,因此直接引用中南大學鄒崢嶸教授團隊建立的同型號Canon EOS5D相機檢校結果[14],見表1。

表1 Canon EOS 5D相機檢校參數
3.控制點布設與影像獲取
在1號溝和2號溝內選擇盡量均勻布設的控制點,利用塑料圖釘對控制點進行標注。本研究中,共在主溝和副溝設立個34個控制點,如圖2所示。在主溝溝頭選擇一個位置較高的點架設全站儀,設定相對的平面坐標系,將全站儀所在點坐標設置為(100,100,100),使用免棱鏡模式,全站儀激光直接瞄準大頭針頂部中心,坐標測量使用測回法,每個控制點測3個測回,最后控制點結果取平均值,見表2。獲取完控制點以后,利用免棱鏡模式隨機測量了個122驗證點,用以對攝影測量獲取的DEM數據進行精度驗證。
進行攝影時,為了盡量保證多幅影像獲取時的角度、高度一致,保持相機的穩定性,盡量使攝影照片接近于航攝影像,利用三角架對相機進行固定,并對擺放三角架的地面進行平整,利用標尺作為參照,拍照時平行移動三角架,使獲取的兩幅相鄰影像的重疊度在80%以上,最終共獲得研究區影像5景。

圖2 控制點測量及控制點分布圖
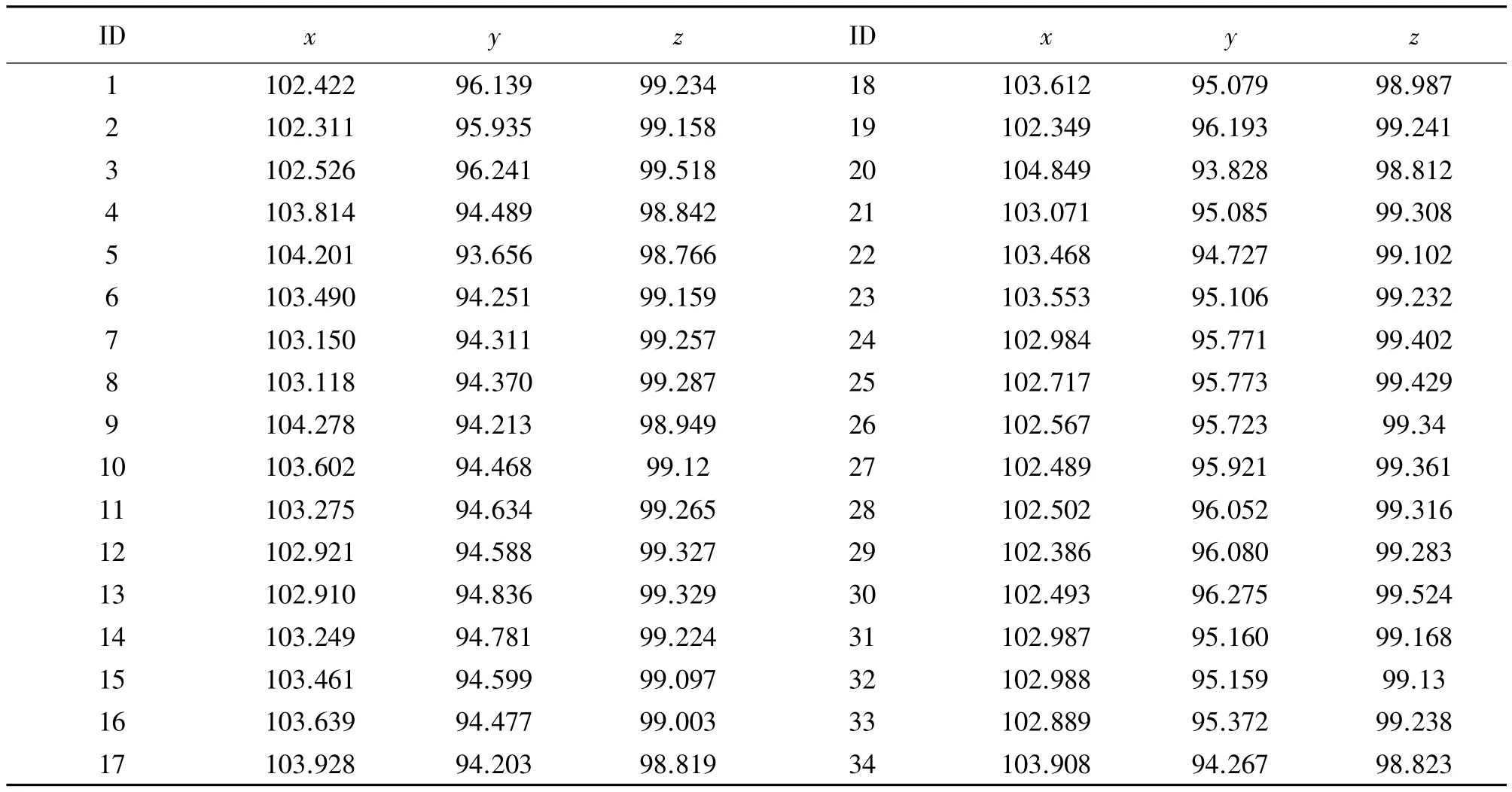
表2 控制點編號及其坐標
四、數據處理
使用普通數碼相機進行近景攝影測量圖像處理流程如圖3所示。
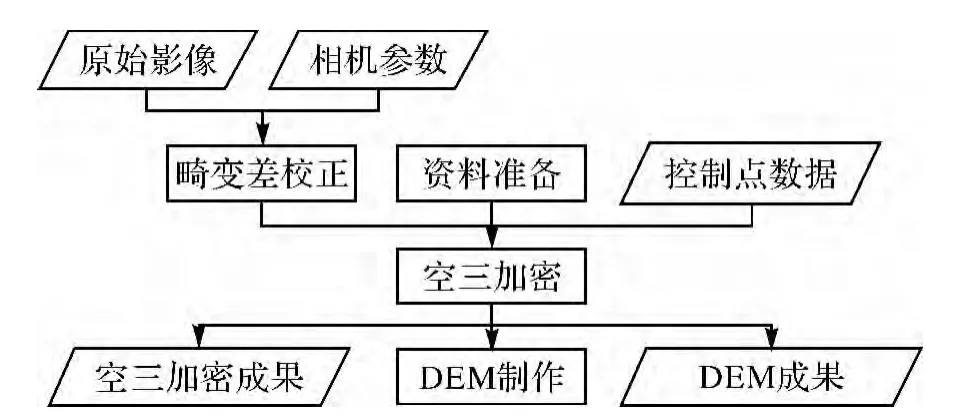
圖3 近景攝影測量圖像處理流程
1.原始影像和相機參數的獲取
獲取照片后,讀取拍照時的相機參數(見表3),主要相機參數有:寬度、高度、水平分辨率、垂直分辨率、位深度、焦距。結合檢校結果的主點坐標(x0,y0)、主距(f)、畸變系數(k1)、攝影中心坐標(Xs,Ys,Zs)等參數,建立相機檢校文件(*.cam格式)。
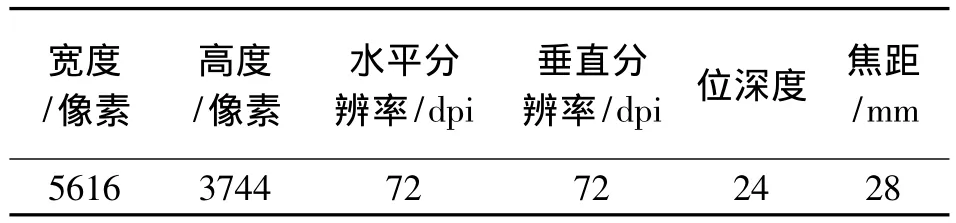
表3 相機獲取的影像參數信息
2.畸變差校正
由于拍攝的相機為非量測相機,其像片存在邊緣畸變,需對其進行畸變差校正。利用中國測繪科學研究院研發的高分辨率遙感影像數據一體化測圖系統PixelGrid對照片進行畸變差校正,選擇好相機參數文件選擇后,在相機參數單位中選擇該測區相機參數文件的單位(mm)。將所有影像添加入軟件,可以實現影像的一次性畸變差校正。
3.建立測區工程
在設置航攝區域必要參數模塊中,首先設置工程目錄名,將攝影比例尺設置為3000,然后設置相機檢校參數文件,為了提高模型連接成功率,將內定向限差、相對定向限差和模型連接限差都設定為0.02 mm,設置平差迭代允許最大次數為20,平差迭代停止時變化量0.005。建立好測區工程文件后,直接導入全站儀測量的控制點數據,建立地面控制文件。
4.空三加密
進行空三加密前,首先進行生成金字塔影像和索引影像的操作,金字塔影像在匹配相對定向點時需要使用,索引影像是在瀏覽影像時所生成的文件。隨后進行影像的自動內定向操作,相對定向完成后,便可開始進行模型連接,完成連接后,進行航帶初始點提取;然后進行全自動航帶間轉點及數據整理,自由網平差;自由網平差合格后進行控制點提取及區域網平差;再點擊平差工具,進行區域網平差解算;解算后,查看其控制點殘差,如果控制點超限,則需對其進行修改再平差,直到連接點及控制點都滿足要求為止,解算合格后,就完成了整個測區的空三加密。
5.DEM匹配及編輯
導入空三加密成果,輸入測區航向重疊率、測區平均高程和測區旁向重疊率進行工程及格式轉換,生成 PixelGrid工程文件。影像格式轉換完成后,進入PixelGrid主模塊,然后進行核線影像生成,設置影像匹配參數,輸入每個像對切除影像的邊緣像素值,再設置該區域的DEM格網間隔為0.05 m,隨后開始進行DEM自動匹配。DEM自動匹配完成后,點擊“DEM拼接生成”按鈕,開始把匹配好每個像對的DEM數據拼接成一個大DEM文件,如圖4所示。
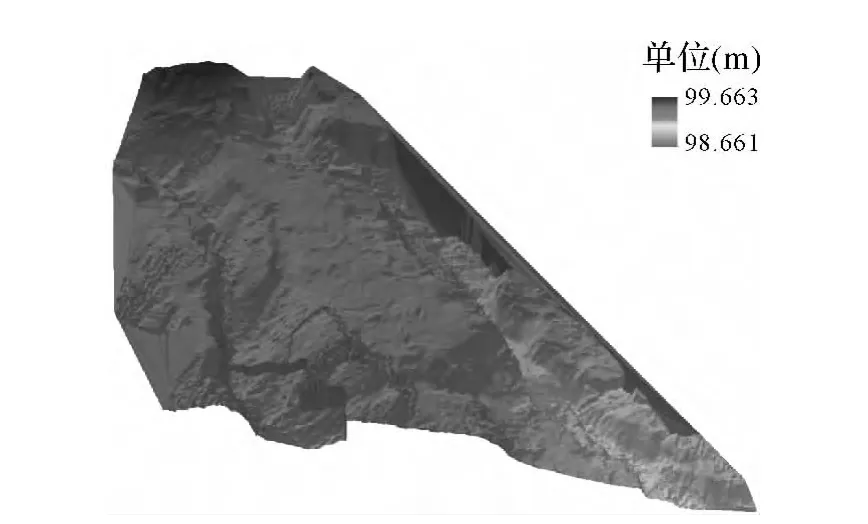
圖4 拼接完成的研究區DEM
五、結果分析
1.DEM精度驗證
基于全站儀隨機測量的122個驗證點,利用ArcGIS軟件的Extract Value to Points工具提取其DEM上的高程信息,分別利用平均誤差ME、中誤差RMSE和誤差標準差STD來估算獲取的DEM數據的準確度。平均誤差是數據和真實值的誤差的平均值。中誤差是衡量觀測精度的一種數字標準,亦稱標準差或均方根差,它是相同觀測條件下的一組真誤差平方中數的平方根,誤差標準差體現的是誤差的離散程度,從誤差標準差可以看出數據誤差的波動程度。它們的計算公式分別如下[15]
式中,εi表示實測值(測量結果)與采樣值(DEM結果)的差;n代表采樣點個數。對全站儀測量驗證點高程值和近景攝影測量建立的DEM上提取的高程值的平均誤差、中誤差、誤差標準差進行計算,計算結果見表4。測量誤差的平均值為1.231 7 cm,最大最小值-3.73 cm,最大值 0.699 5 cm,平均誤差-1.23 cm,中誤差 1.638 7 cm,誤差標準差 1.080 9 cm。從誤差結果來看,利用本研究所使用的方法生成的DEM高程值數據和實際測量結果的誤差在厘米級,只能滿足較粗略的土壤侵蝕調查需求,測量結果可以用于提取侵蝕溝的邊界、面積、土壤侵蝕量的估算等應用分析。

表4 校正和未校正的坡度數據誤差指標分析結果 cm
2.誤差的空間分布
在計算結果的誤差當中,可以看出大部分誤差結果為負值,即實際測量結果高程值小于DEM提取高程值,在ArcGIS軟件中,利用二階反權距離插值方法對誤差計算結果進行空間插值,并按正負值進行彩色分級顯示,結果如圖5所示。可以看出,僅在個別驗證點處,實際測量高程值大于DEM所提取的高程值,在大部分地區,測量結果要低于DEM觀測值。為了分析誤差大小的空間分布狀況,利用反權距離插值方法對誤差絕對值進行空間插值,如圖5所示,從圖中可以看出,誤差比較大的地區都分布在溝頭或者溝中部相對較深的地區。從這個結果可以看出,利用攝影測量所獲得的DEM數據,在刻畫地貌形態時,對于影像陰影覆蓋的溝底地區,攝影測量產生的誤差較大,容易高估出地表實際的高程,不能反映地表的細節信息。
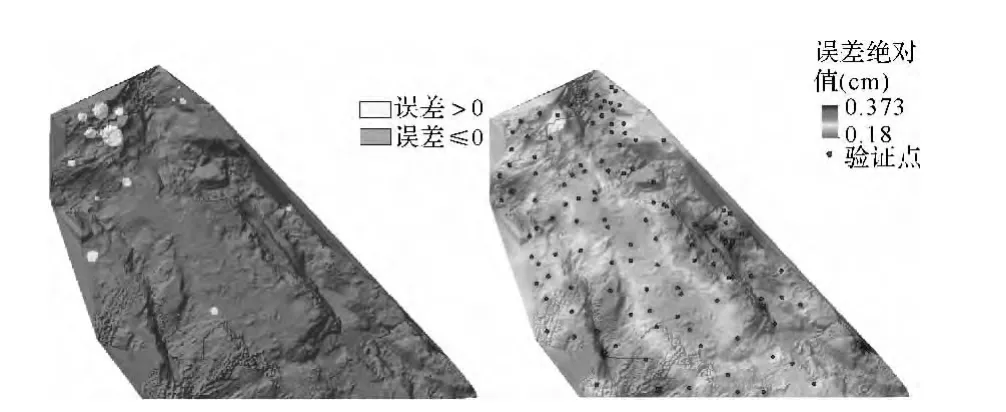
圖5 誤差正負值分布圖和絕對誤差分布圖
六、結論與建議
本研究利用近景攝影測量技術,使用普通單反相機獲取的影像結合全站儀測量的地面控制點在PixelGrid軟件中對三峽庫區消落帶地貌進行三維建模,并利用全站儀測量的驗證點來計算獲取的DEM數據的精度。從結果可以看出,利用本研究所使用的近景攝影測量技術可以從普通單反相機照片中提取地貌DEM信息,但由于相機校準和實際軟件處理效果的限制,影像所獲取的DEM數據平均誤差在1.2 cm左右,而且由于影像陰影和相機傾角等原因,獲取數據在溝底和地貌起伏較大的地區誤差較大,無法較精確地還原地貌信息。本研究所使用的技術方法可以用于較粗略的消落帶土壤侵蝕調查,可以用于提取土壤侵蝕溝的邊界、面積、深度、坡度、土壤侵蝕量等信息,結合多期調查結果,還能進行土壤侵蝕溝發育過程的粗略監測。基于近景攝影測量技術研究簡單、可靠并快速的普通數碼相機的攝影測量方法,將是進一步研究的方向。
[1]刁承泰,黃京鴻.三峽水庫水位漲落帶土地資源的初步研究[J].長江流域資源與環境,1999,8(1):75-80.
[2]張信寶.關于三峽水庫消落帶地貌變化之思考[J].水土保持通報,2009,29(3):1-4.
[3]鮑玉海,賀秀斌.三峽水庫消落帶土壤侵蝕問題初步探討[J].水土保持研究,2011,18(6):190-195.
[4]鮑玉海,唐強,高銀超.水庫消落帶消浪植生型生態護坡技術應用[J].中國水土保持,2010(10):37-39.
[5]馮文灝.近景攝影測量:物體外形與運動狀態的攝影法測定[M].武漢:武漢大學出版社,2002.
[6]黃桂平.數字近景工業攝影測量關鍵技術研究與應用[D].天津:天津大學,2005.
[7]張祖勛.數字攝影測量的發展與展望[J].地理信息世界,2004,2(3):1-5.
[8]楊化超,鄧喀中,張書畢,等.數字近景攝影測量技術在礦山地表沉陷監測中的應用研究[J].中國圖象圖形學報,2008,13(3):519-524.
[9]THOMASK,HANSGM.Photogrammetric 3Dpoint determination for dam monitoring[J].Optical 3D Measurement T echniques,1995,14(10):161-168.
[10]石必明,俞啟香.遠距離保護層開采煤巖移動變形特性的試驗研究[J].煤炭科學與技術,2005,33(2):39-41.
[11]賈嬌,艾海濱,張力,等.應急響應中PixelGrid無人機遙感數據處理的關鍵技術與應用[J].測繪通報,2013(5):62-65.
[12]侯文廣.基于普通數碼相機實現三維重建的應用研究[D].武漢:武漢大學,2006.
[13]崔紅霞,孫杰,林宗堅,等.非量測數碼相機的畸變差檢測研究[J].測繪科學,2005,30(1):105-107.
[14]王成亮.基于普通數碼影像的近景攝影測量技術研究與應用[D].長沙:中南大學,2006.
[15]劉飛,范建容,郭芬芬,等.藏北高原區DEM高程與坡度值提取的誤差分析[J].水土保持通報,2011,31(6):148-151.
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
北京測繪(2020年12期)2020-12-29 01:37:18
科技傳播(2019年22期)2020-01-14 03:06:54
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
電測與儀表(2016年9期)2016-04-12 00:29:52
