基于彩色背景建模的前景檢測(cè)
2014-12-13 09:48:58孫海軍嵇亮亮
江蘇科技信息 2014年22期
孫海軍,嵇亮亮,王 耿
(中國電子科技集團(tuán)公司第二十八研究所,江蘇南京 210007)
0 引言
對(duì)序列圖像的運(yùn)動(dòng)分析是當(dāng)前計(jì)算機(jī)視覺領(lǐng)域的一個(gè)重要研究方向,其研究內(nèi)容相當(dāng)豐富,在高級(jí)人機(jī)交互、智能監(jiān)控、交通監(jiān)測(cè)等方面具有廣泛的應(yīng)用前景。其中一個(gè)重要課題就是基于視頻的運(yùn)動(dòng)目標(biāo)檢測(cè),判斷視頻序列中是否存在運(yùn)動(dòng)目標(biāo),并確定運(yùn)動(dòng)目標(biāo)的位置、形狀等特征。目前主要的運(yùn)動(dòng)檢測(cè)方法有差分法[1]、光流法[2,3]和背景減除方法[4]。不同方法存在著各自的優(yōu)缺點(diǎn),對(duì)于背景減除法而言,最主要的難點(diǎn)在于尋找理想的背景模型以及后續(xù)背景模型的更新[5]。本文通過對(duì)像素統(tǒng)計(jì)分析,建立彩色背景及振幅模型的方法來實(shí)現(xiàn)前景檢測(cè),并持續(xù)更新模型。
1 算法整體框架
本文的算法框圖如圖1 所示。
依圖1 所示,首先對(duì)圖像進(jìn)行圖像預(yù)處理,然后初始化背景模型,當(dāng)初始模型完成后,進(jìn)行提取前景。在提取前景的過程中,不斷對(duì)模型進(jìn)行更新。
2 彩色背景建模
2.1 圖像預(yù)處理
由于原始圖像中往往存在噪聲,所以直接求差分受到的影響比較大。因此,在進(jìn)行背景減除之前,必須先對(duì)圖像進(jìn)行濾波處理。本文采用中值濾波的方法,對(duì)圖像進(jìn)行平滑處理,剔除了部分噪聲。
2.2 背景模型
對(duì)于視頻圖像的某一像素點(diǎn)進(jìn)行統(tǒng)計(jì),可以發(fā)現(xiàn)在大部分的時(shí)間段內(nèi),該像素點(diǎn)RGB 各通道的亮度值多為背景點(diǎn)的值,變化幅度很小,只有在有前景運(yùn)動(dòng)目標(biāo)通過時(shí),它的值才會(huì)發(fā)生較大變化,如圖2 所示,列出了R 通道的值變化。
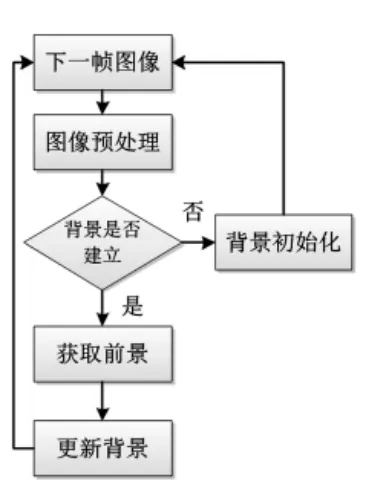
圖1 算法框圖
從圖2 中可以發(fā)現(xiàn),當(dāng)有行人目標(biāo)通過時(shí),在第15 幀亮度值開始下降,當(dāng)?shù)?5 幀目標(biāo)進(jìn)入該點(diǎn)時(shí)已經(jīng)發(fā)生了很大的亮度值變化,直到第50 幀目標(biāo)離開時(shí),亮度值恢復(fù)。而當(dāng)沒有運(yùn)動(dòng)目標(biāo)通過時(shí),背景的亮度值維持在180 左右的很小范圍內(nèi)。
本文在求取初始背景模型時(shí),采用對(duì)100 幀圖像求取各通道的平均值,得到初始的背景,公式如下:其中,In為第n 幀圖像,bg 為背景圖像。

圖2 運(yùn)動(dòng)前景分析圖
這里要求視頻的初始100 幀最好是以背景居多的時(shí)段,如果是前景目標(biāo)較多,則會(huì)影響初始的前景檢測(cè),但通過背景更新,之后仍然可以得到正確背景。
2.3 背景像素振幅值模型
從之前的分析,已經(jīng)知道背景值是在一定的區(qū)間范圍內(nèi)變化的。在得到初始彩色背景模型后,我們已經(jīng)知道每一個(gè)像素點(diǎn)的基準(zhǔn)值(即背景值)。那么之后的圖像與背景差分,如果差值落在振幅范圍之內(nèi)的,可以認(rèn)為是背景,振幅之外則認(rèn)為是前景。
不難發(fā)現(xiàn),其實(shí)像素點(diǎn)的亮度值服從高斯分布的,本論文提出的背景模型是基于像素的,每一個(gè)像素點(diǎn)的亮度值都可以看作是一個(gè)獨(dú)立的隨機(jī)過程,在較長的時(shí)間段內(nèi),背景的像素點(diǎn)的顏色值穩(wěn)定分布在一個(gè)確定值的領(lǐng)域內(nèi)。這也是本文算法的理論依據(jù)及基礎(chǔ)。對(duì)于高斯分布模型,利用圖像序列在得到均值之外,還可以估計(jì)出方差,這樣就可以描述該高斯分布。這里除了假設(shè)每個(gè)像素點(diǎn)是獨(dú)立之外,為了計(jì)算方便還假設(shè)每個(gè)像素點(diǎn)的顏色分量都是獨(dú)立分布,服從一維高斯分布[6]。
在云計(jì)算層,使用Rest代理對(duì)智能傳感設(shè)備和數(shù)據(jù)存儲(chǔ)平臺(tái)的時(shí)間響應(yīng)并進(jìn)行標(biāo)記屬于快消息還是慢消息;業(yè)務(wù)引擎在收到業(yè)務(wù)后,對(duì)業(yè)務(wù)進(jìn)行過濾,通過業(yè)務(wù)處理時(shí)長與隊(duì)列處理基準(zhǔn)時(shí)長的比較結(jié)果動(dòng)態(tài)調(diào)整隊(duì)列映射配置表,隨后將處理結(jié)果轉(zhuǎn)發(fā)給智控引擎;智控引擎根據(jù)應(yīng)用層的需要進(jìn)行智能調(diào)控,并將相關(guān)的調(diào)控信息發(fā)送給推送引擎;推送引擎通過智能數(shù)據(jù)管理平臺(tái)(Smart Data Management Platform, SDMP)引擎將指令發(fā)送給相應(yīng)的智能終端,從而對(duì)用電設(shè)備發(fā)起控制。
所以本論文除了一般的初始背景圖像建模外,還對(duì)每個(gè)像素點(diǎn)的振幅值進(jìn)行建模。公式如下:

其中,In為第n 幀圖像,bg 為背景圖像,S 為背景振幅值,皆為與圖像有相同大小的三通道矩陣。
本論文在初始背景建立后,繼續(xù)利用100 幀圖像對(duì)背景振幅值進(jìn)行建模。即經(jīng)過共200 幀的初始化階段,就完成了自動(dòng)彩色背景建模的工作。
3 前景提取
在背景建模初始化之后,就進(jìn)入檢測(cè)階段,在已經(jīng)獲得了彩色背景圖像的基礎(chǔ)上,利用背景減除法的方法可以很容易得到前景圖像。比較當(dāng)前圖像和背景圖像中對(duì)應(yīng)像素點(diǎn)的差異,如果某一通道的差值大于背景振幅閾值,則可以判定該像素點(diǎn)為前景。
對(duì)于輸入的視頻圖像I 與背景圖像bgImg 和背景振幅值sgm 進(jìn)行比較,判斷背景與前景區(qū)域:

其中,I(x,y,i)為輸入圖像在坐標(biāo)(x,y)處i 通道的值,bg(x,y,i)和S(x,y,i)分別代表背景圖像和背景振幅在坐標(biāo)(x,y)處i 通道的值,C 代表調(diào)整參數(shù),為常數(shù),這是一個(gè)經(jīng)驗(yàn)調(diào)整值,可根據(jù)具體場(chǎng)景調(diào)節(jié)背景振幅閾值。
若根據(jù)上述公式計(jì)算得到的圖像點(diǎn)(x,y)處三通道的差值都小于0,則表示輸入的當(dāng)前圖像在(x,y)處為背景圖像,否則判定為前景圖像。
4 模型更新
在一般的監(jiān)控場(chǎng)景中,光線會(huì)隨著時(shí)間或其他原因變化從而引起圖像全局或者局部亮度的變化。而且場(chǎng)景中也可能存在進(jìn)入固定物體或者原有物體的移出,對(duì)于這部分區(qū)域,應(yīng)該在一段時(shí)間之后,能夠正確更新得到正確的背景。所以背景模型必須要具有自適應(yīng)性,需要實(shí)時(shí)地對(duì)背景模型進(jìn)行更新。
為了滿足系統(tǒng)的實(shí)時(shí)性要求,采用計(jì)算簡(jiǎn)單的移動(dòng)均值的方法來更新比較適合。但一般的移動(dòng)均值法,無論前景還是背景,都按照同一策略統(tǒng)一計(jì)算。這樣將前景和背景以同樣的權(quán)值更新,勢(shì)必會(huì)對(duì)新的背景圖像產(chǎn)生影響,造成錯(cuò)誤的背景模型,對(duì)后面的檢測(cè)過程也會(huì)有影響。因此,本文采用改進(jìn)的移動(dòng)均值法對(duì)背景圖像和背景振幅進(jìn)行更新,根據(jù)前景提取的結(jié)果,對(duì)前景和背景采用不同的更新策略,具體如下:
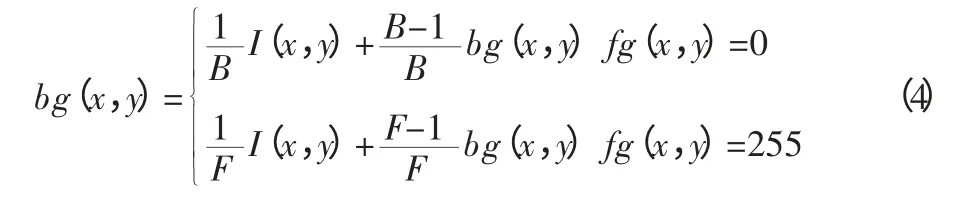
其中,I 為當(dāng)前幀圖像,bg 為背景圖像,fg 為前景二值圖像,B 和F 分別為背景更新率和前景更新率,都為常數(shù),F(xiàn) 取值大于B。
同樣地,對(duì)于背景振幅值,也需要對(duì)其進(jìn)行更新。首先計(jì)算當(dāng)前幀圖像的振幅值,然后和背景更新一樣的更新策略進(jìn)行更新,公式如下:
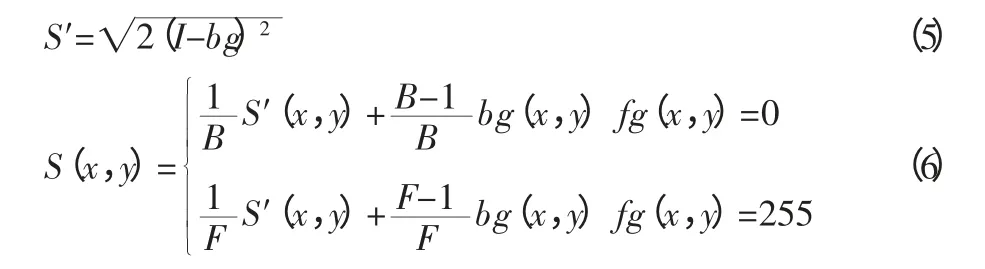
其中,S′為當(dāng)前圖像與背景圖像比較得到的當(dāng)前振幅值,S 為圖像的背景振幅值。
5 結(jié)果分析
圖3 所示的是運(yùn)用本論文的背景建模算法進(jìn)行背景提取的結(jié)果。3 個(gè)時(shí)刻點(diǎn)的光線隨著時(shí)間的遷移逐漸變暗,背景提取結(jié)果十分良好,并且能夠適應(yīng)環(huán)境變化。
圖4 所示的是不同場(chǎng)景下前景提取結(jié)果的示意圖,結(jié)果表明在基于本文背景建模和前景判斷算法,能夠較好的提取運(yùn)動(dòng)目標(biāo)。
6 總結(jié)
本章提出了一種基于背景建模減除法前景檢測(cè)算法。在對(duì)現(xiàn)有的背景建模方法分析之后,本文提出的一種準(zhǔn)確、快速、適應(yīng)能力強(qiáng)的背景建模方法,主要包括背景建模、背景振幅建模、前景提取以及背景與背景振幅更新。實(shí)驗(yàn)分析表明,本文的前景檢測(cè)算法具有較好的準(zhǔn)確性與魯棒性。

圖3 背景提取結(jié)果示意圖
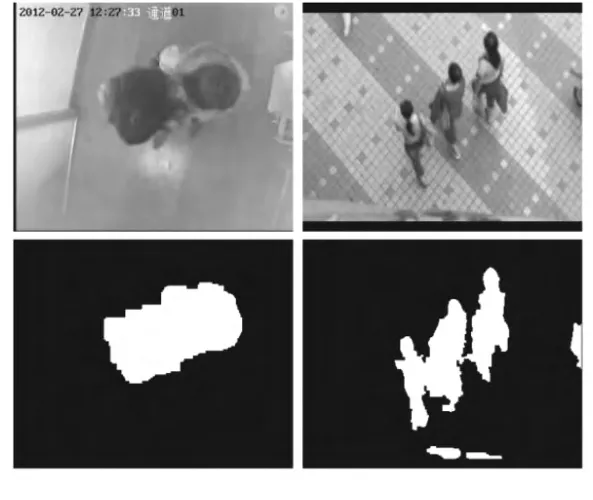
圖4 前景提取結(jié)果示意圖
[1]Lipton A J,F(xiàn)ujiyoshi H,Patil R S.Moving target classification and tracking from real-time video[C].Fourth IEEE Workshop on Applications of Computer Vision,1998.
[2]Horn B K P,Schunck B G.Determining optical flow[J].Artificial intelligence,1981(1).
[3]Tekalp A M,Tekalp A M.Digital video processing[M].Upper Saddle river,NJ:Prentice Hall PTR,1995:126-132.
[4]Kornprobst P,Deriche R,Aubert G.Image sequence analysis via partial differential equations [J].Journal of Mathematical Imaging and Vision,1999(1).
[5]Collins R T,Lipton A,Kanade T,et al.A system for video surveillance and monitor ing[M].Carnegie Mellon University,the Robotics Institute,2000.
[6]Huwer S,Niemann H.Adaptive change detection for real-time surveillance applications[C].Third IEEE International Workshop on Visual Surveillance,2000.
[7]柴進(jìn).視頻監(jiān)控中的人數(shù)統(tǒng)計(jì)和人群密度分析[D].西安:西安電子科技大學(xué),2011.
[8]李立仁,李少軍,劉忠領(lǐng).智能視頻監(jiān)控技術(shù)綜述[J].中國安防,2009(10).
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
建材發(fā)展導(dǎo)向(2021年6期)2021-06-09 05:57:08
現(xiàn)代國際關(guān)系(2021年2期)2021-04-13 01:59:16
當(dāng)代陜西(2020年14期)2021-01-08 09:30:42
中國外匯(2019年11期)2019-08-27 02:06:32
貴州師范學(xué)院學(xué)報(bào)(2016年4期)2016-12-01 03:54:07
太空探索(2016年10期)2016-07-10 12:07:01
