牽引式排水管道清淤機器人的研究
2014-12-18 08:04:12李成群馬利平路春光李華明
制造業自動化 2014年21期
關鍵詞:作業
李成群,馬利平,路春光,李華明
(1.河北聯合大學 機械工程學院,唐山 063009;2.承德鋼鐵集團有限公司,承德 067002)
0 引言
在我國,城市排水管道大多埋于地下,由于居民生活垃圾、工廠廢物、基建工地泥漿等在排水管道中發生沉淀,淤積過多造成了管道堵塞,污水溢流,小則影響居民日常生活,嚴重時會打亂整個城市的正常生活節奏,因此必須對其及時進行清理和疏通。
目前,城市排水管道清淤主要采用的方法是:絞車清淤、高壓水清淤、沖刷清淤、清淤球清淤和通溝機清淤等。其中絞車清淤和高壓水清淤在我國最為常用。高壓水清淤需用飲用水質的干凈水,所以成本很高,而且這種清淤方法對于管徑還有一定的限制。絞車清淤相對于高壓水清淤來說成本低,對于管徑無特定限制,但是需要人工來完成穿纜作業,井下的工作環境非常惡劣,給工人工作帶來極大不便,危害工人的健康,甚至危及工人的生命[1]。所以為了改善傳統清淤作業的工作環境,減輕工人的勞動強度,提高清淤作業的自動化水平,介紹了一種牽引式城市排水管道清淤機器人,此機器人采用一種新型機械結構和控制系統,為其更有效地完成排水管道的清淤工作提供了解決方案。
1 清淤機器人結構及工作原理
牽引式排水管道清淤機器人主要由清淤機器人本體、鋼絲繩牽引裝置、清淤斗、清淤斗舉升翻轉機構、監控系統和控制系統等部分組成,如圖1所示。

圖1 城市排水管道清淤系統結構圖
1)為保證清淤機器人清淤作業行程和靈活性,此清淤機器人車體,底部設有車輪,以自攜的蓄電池作為動力源,采用電機驅動車輪的運動方式,帶動清淤斗和牽引鋼絲繩一起向遠離窨井井口的方向運動至計劃清淤的位置。
2)考慮到排水管道為圓柱狀,為了與排水管道內壁的圓形輪廓相吻合,清淤機器人車體的車輪制成具有一定弧度的形狀。車輪的材料采用耐磨、耐腐蝕的橡膠,并在輪子的表面制有凹凸花紋[2],以達到增加車輪與管壁間接觸摩擦系數的目的,以此防止清淤作業過程中的打滑現象。
3)清淤機器人在管道內部清淤作業需要有足夠的牽引力,為此設計了鋼絲繩牽引裝置,牽引鋼絲繩的一端和清淤機器人車體連接,另一端通過牽引鋼絲繩支架的過渡和安裝于工程車里的牽引鋼絲繩電機連接;用于拖拽清淤機器人車體連同清淤斗向靠近窨井井口的方向運動,在運動過程將淤泥收入清淤斗內,完成清淤作業。
4)受到排水管道形狀的限制,清淤斗整體形狀為橫向放置的筒體,一端封閉為斗底,另一端為開口,開口的上半部為半圓形缺口,開口的下部為圓弧狀坡口,清淤斗靠近管道內壁;清淤斗底部裝有清淤斗輪,便于清淤作業時清淤斗在管道內部行走。
5)此清淤機器人采用了清淤斗舉升翻轉機構,工作原理為:
通過清淤機器人車體上的電機帶動傳動軸運動,進而帶動連桿翻轉(轉過一定角度),傳動軸通過軸承底座設置在清淤機器人車體上;電動缸兩端分別和清淤斗、連桿鉸接,通過電動缸伸縮桿的伸長和縮短使清淤斗進一步翻轉;此機構的作用是清淤作業開始前,將清淤斗調整,使清淤斗開口位于和管道內壁相切的位置,以便清淤,清淤結束后將清淤斗舉升并翻轉,避免清淤斗內淤泥外泄。
6)清淤作業過程中要求機器人在存有污水和污泥的排水管道內部行走,這就要求機器人具備良好的密封性,所以此清淤機器人采用動靜結合的密封方式,即對于清淤車體的密封采用密封墊片進行靜密封,對于輸出軸處的密封采用旋轉格來圈進行動密封[3]。
7)清淤機器人車體上安裝有配帶雨刷的紅外防水攝像頭[3]。通過工業攝像頭CCD實時采集排水管道內部的工作狀況,采集的數據通過無線傳輸至位于地面上方工程車內部的上位機進行顯示,操作人員根據顯示畫面實時進行操作。
2 控制系統的硬件設計
2.1 總體設計
本控制系統采用上、下位機的二級分布結構,控制組成框圖如圖2所示。上位機主要負責檢查清淤機器人的運行情況并顯示管道內部清淤作業現狀。下位機選用S7-200系列CPU226的PLC即可,主要完成對直流電機、步進電機和電動缸的動作控制。直流電機M1用于驅動清淤機器人車體在排水管道內部空載運動,步進電機M2和電動缸用于驅動清淤斗舉升翻轉機構運動。具體操作過程為:當用升降機將清淤機器人吊送至排水管道的窨井井口后,按下啟動鍵S1,啟動清淤機器人行走機構驅動電機M1正轉,當清淤機器人運動至計劃清淤位置后,按下停止鍵S2,行走機構驅動電機停止轉動。按下啟動鍵S3,啟動電動缸電機M3,使電動缸伸縮桿伸長至極限位置,電動缸停止運動,此時在電動缸的帶動下清淤斗斗口朝向和連桿平行,隨后按下啟動鍵S4,舉升翻轉機構電機M2正轉,將清淤斗放下,當清淤斗和管道內壁相切時,按下停止鍵S5,電機M2停止轉動。接下來啟動鋼絲繩牽引裝置電機正轉,收縮鋼絲繩,拖拽清淤車體連同清淤斗向靠近窨井井口方向運動,在運動過程中,將清淤斗前方的淤泥收入斗內。淤泥收集結束后,鋼絲繩牽引裝置電機停轉,按下啟動鍵S6,使電機M2反轉,將清淤斗舉起一定高度,按下停止鍵S5,電機M2停轉。按下電動缸停止鍵S7,電動缸伸縮桿縮短至最短位置后停止運動,此時清淤斗反向翻轉一定角度,使斗口朝上,避免斗內淤泥外泄。啟動鋼絲繩牽引裝置電機正轉繼續帶動牽引鋼絲繩運動,拖拽清淤機器人車體連同清淤斗運動至窨井井口位置。
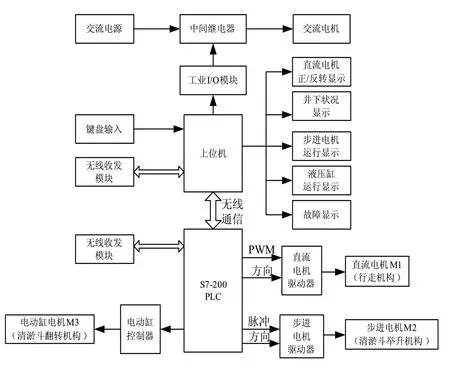
圖2 清淤機器人控制系統組成框圖
2.2 無線通訊
清淤機器人在狹窄的排水管道內部作業,若采用有纜作業,機器人就需要拖帶動力電纜和信號電纜進行作業,當機器人行至一定距離時,電纜與管壁之間的摩擦力變大,甚至超過驅動電機的牽引力,嚴重影響清淤作業效率。相比之下,無纜機器人工作時所需能量由自攜式蓄電池提供,省去了沉重的電纜,不但簡化了系統的結構,而且機器人的作業行程及運動靈活性均得到提高[4]。基于上述優缺點,本清淤機器人采用無線通訊方式。設計采用西門子DTD433M無線收發模塊,該模塊是西門子PLC專用遠距離數據傳輸模塊,可以通過MDBUS協議與上位機進行數據的交互。

表1 PLC控制I/O功能分配表
2.3 PLC控制電路
2.3.1 PLC控制直流電機調速
清淤機器人在清淤作業過程中,當空載行走于計劃清理的淤泥上方時,要求清淤機器人以較慢的速度行駛,當清淤機器人空載行走于已經清理干凈的管道內部時,要求機器人快速行駛,以節省清淤作業的時間。機器人在管道內部以不同的速度行駛,通過PLC輸出PWM信號控制機器人驅動電機轉速來完成。
2.3.2 PLC控制步進電機運動
清淤機器人在清淤作業時要求清淤斗被放下,清淤斗裝滿淤泥后要求被舉起。通過PLC控制步進電機M2正反向轉動45°,帶動連桿使清淤斗被舉起和放下。此動作簡單,只需PLC正反向輸出一定量的脈沖數即可。
2.3.3 PLC控制電動缸運動
電動缸的作用是當清淤斗被舉起后,電動缸伸縮桿縮短,使清淤斗翻轉一定角度至斗口朝上的位置,防止斗內的淤泥回流至管道內部。當準備清淤作業時,電動缸伸縮桿伸長,使清淤斗復位。此動作通過PLC控制兩個繼電器KM1和KM2的通斷電來完成。
2.3.4 PLC控制各I/O口功能分配表
S7-200系列PLC有兩個PTO/PWM發生器,分別為Q0.0和Q0.1,因此I/O功能分配如表1所示。
3 控制系統的軟件設計

圖3 控制系統主程序流程圖
系統采用模塊化結構設計,控制系統主程序流程圖如圖3所示,主要包括主模塊和功能子程序模塊。
主模塊主要完成系統初始化、與上位機建立連接和機器人測試運行。
功能子程序模塊主要包括直流電機(行走機構)模塊、步進電機(清淤斗舉升機構)模塊和電動缸(清淤斗翻轉機構)模塊。各功能子模塊采用順序控制,當接收到上位機指令后,嚴格按照程序指定順序執行相應動作。
4 結論
設計的牽引式排水管道清淤機器人,簡單可靠的機械結構保證了機器人在管道內部的自由行走,鋼絲繩牽引裝置的引用使得清淤機器人在有載清淤作業過程中具有足夠的動力。模塊化的控制系統軟件設計,保證清淤機器人嚴格按照指定程序順序執行相應動作。監控系統適時監控管道內部清淤作業情況,并通過無線通訊設備傳輸數據,進而通過S7-200系列PLC對直流電機、步進電機以及電動缸進行控制完成清淤動作。整個清淤系統大大提高了清淤作業的自動化水平,具有廣闊的市場推廣前景。
[1]楊清梅,王立權,王知行.一種新型排水管道機器人研究[J].機床與液壓,2006(3):125-127.
[2]王豐,董小蕾,蔡玉強,段潤保.中小直徑排水管道纜控清淤機器人的研究[J].機械設計與制造,2008(4):165-167.
[3]嵇鵬程,沈惠平,鄧嘉鳴,朱偉,許建國,計玉根.一種新型排水管道清淤機器人控制系統的設計[J].中國農村水利水電,2010(7):69-71.
[4]王豐,秦保新,劉學東.無纜式城市排水管道清淤機器人的通訊設計[J].機床與液壓,2009(5):101-103.
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
