高超聲速飛行器抗干擾反步滑模控制
2014-12-19 08:59:00后德龍
北京航空航天大學學報 2014年1期
關鍵詞:設計
后德龍 王 青 王 通
(北京航空航天大學 飛行器控制一體化技術重點實驗室,北京100191)
董朝陽
(北京航空航天大學 航空科學與工程學院,北京100191)
目前,在具有參數不確定的線性高超聲速飛行器控制系統設計方面,國內外文獻主要采用自適應控制[1]、魯棒控制[2]以及基于線性變參數(LPV,Linear Parameter Varying)系統[3-4]的方法.由于高超聲速飛行器自身復雜的動力學特性和苛刻的飛行條件,使得其動力學模型具有高度非線性[5],因此基于線性系統設計的控制器可能無法保證飛行穩定性和性能.
在非線性控制領域,反步法是一類非常有效的控制策略[6-8].文獻[6]在輸入輸出線性化的基礎上,采用動態逆和反步法結合設計了高超聲速飛行器的控制器.文獻[7]則結合反步法與神經網絡方法實現了對迎角與速度指令的穩定跟蹤.文獻[8]提出了一種基于指令濾波的魯棒自適應Backstepping設計方法.然而,上述控制器的設計過程中均未考慮外部擾動的影響.事實上,外部擾動會對控制系統的效果產生較大的影響,因此在進行控制系統設計時應該予以考慮.
本文基于擴展狀態器提出了一種抗干擾反步滑模控制方案,解決了存在不確定參數和外部擾動下的高超聲速飛行器非線性控制問題.
1 問題建模
1.1 高超聲速飛行器動力學模型
文獻[9]采用曲線擬合的方法給出了一類吸氣式高超聲速飛行器動力學模型如下,本文基于該模型研究高超聲速飛行器控制問題.
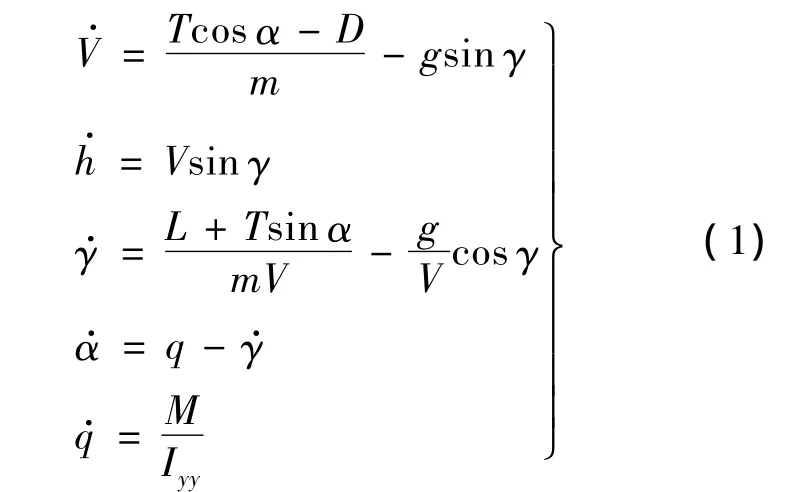
其中,V,h,γ,α,q 分別為飛行器速度、高度、彈道傾角、攻角和俯仰角速度;m,Iyy,g分別為飛行器的質量、繞飛行器機體y軸轉動慣量和重力加速度;T,D,L,M分別為飛行器推力、阻力、升力和俯仰力矩,且力和力矩的表達形式為
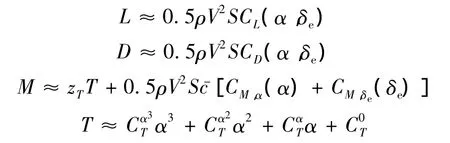
其中,ρ為大氣密度;V為速度;S為參考面積;CL為升力系數;CD為阻力系數;δe為升降舵偏角為參考長度;CM,α為力矩系數中與迎角有關的項;CM,δe為力矩系數中與控制舵偏有關的項為推力中與迎角無關的項分別為推力中與迎角三次方、平方和一次方有關的項.
1.2 反步法設計模型及問題描述
在本文的設計中,將高超聲速飛行器縱向通道的控制問題分解為高度子系統和速度子系統,在高度子系統的設計中,以彈道傾角指令γd代替高度指令hd作為高度子系統的跟蹤信號[10].定義高度跟蹤誤差:
對其進行求導可得
因此γd可設計為
其中,kh>0為控制增益.在下面的設計中,高度子系統均以彈道傾角子系統代替.
圖1給出了控制系統的結構圖,彈道傾角子系統要求彈道傾角跟蹤給定的參考信號,速度子系統以速度作為控制指令實現對速度的跟蹤.
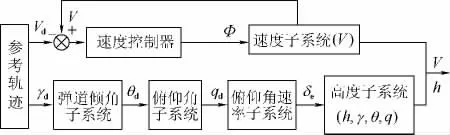
圖1 控制系統框架圖
針對彈道傾角子系統控制器的設計作以下假設.
假設1 將彈道傾角方程和俯仰角速率方程中的推力項、彈道傾角方程中升降舵偏角δe的影響均作為干擾考慮.
在彈道傾角子系統控制器設計時,定義狀態變量:

考慮上述假設,同時考慮γ及q狀態方程中的參數不確定特性,將參數不確定性、假設1中忽略的項以及外部擾動均考慮為干擾,建立如下彈道傾角子系統控制器設計時使用的模型:
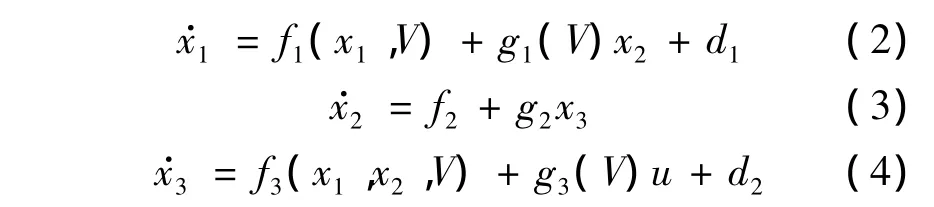
其中
2 控制器設計及穩定性分析
2.1 彈道傾角子系統
以下按照反步法原理進行彈道傾角子系統控制器設計.
步驟1 定義滑模面 S1=x1-γd,由方程(2)得

為了實現有限時間到達滑模面,且削弱抖振現象,定義滑模面趨近律:

理想的名義虛擬控制器可設計為

由于在實際中,干擾為未知信號.采用擴展狀態觀測器(ESO,Extended State Observer)實現對未知干擾的估計[11].將 d1視為拓展狀態,則系統為

其中,x1d為對干擾的擴展狀態;w(t)為干擾d1(t)的導數,也為未知函數,采用如下二階形式 ESO[11]:
式中,E11為對狀態x1的估計誤差;Z11,Z12分別為觀測器輸出;β11和 β12為觀測器增益;函數 fal1定義為
在獲得干擾觀測值后,該步的名義虛擬控制器x2為

注:此為(當作“謂”)燕太子恨于秦王無窮,猶如易水之聲也。夫勇士者,懷須其智,先立其功,荊軻雖決裂之心,臨事因循,豈不勞而無功者也。[10]

則對于正定函數:
其沿系統軌跡的導數為
步驟2 考慮(S1,S2)子系統:

設計該步的名義虛擬控制器x3為

步驟3 考慮(S1,S2,S3)系統:

假設滑模面S3=z3,則設計理想輸入為

其中
同樣設計ESO實現對d2的估計:
式中,E21為ESO的估計誤差;Z21,Z22分別為ESO輸出;β21和 β22為ESO 增益;函數 fal2定義為
則控制輸入表達為

2.2 速度子系統
速度子系統控制器的設計也采用滑模控制方法.選擇滑模面為
對其進行求導并考慮推力T的表達式代入可得
從而可以表達為

其中
設計滑模面的趨近律為

速度通道控制律為

3 仿真驗證
為了驗證上述基于擴展狀態觀測器的抗干擾控制器的效果,采用前述的非線性仿真模型進行仿真分析.飛行器跟蹤方波變化的彈道傾角信號同時保持速度不變.高超聲速飛行器仿真模型采用式(1)的非線性模型,飛行器在動壓保持不變的情況下,跟蹤方波變化的高度信號,同時保持速度不變,初始條件 V0=2 347.6 m,h0=25 908 m,γ0=0°,在此狀態下進行配平計算得到 α0=0.92°,θ0=0.92°,q0=0(°)/s,δe=3.36°,Φ =0.08.彈道傾角子系統3個滑模面趨近律的系數分別為:k11=0.5,k12=0.2;k11=1,k12=0.3;k11=2,k12=0.2.速度通道的滑模面趨近律的系數為k41=0.8,k42=0.2.在仿真考慮將氣動參數的偏差取為25%,將質量及轉動慣性的偏差取為10%,同時考慮前述設計中忽略的Tsin α項及升降舵δe對升力L的影響,并加入0.5°的風干擾附加攻角,將這些量均視為干擾.擴展狀態觀測器的系數分別為 β11=10,β12=10,λ1=0.8,ε1=0.00001,β21=10,β22=10,λ2=0.8,ε3=0.001.在仿真中,考慮符號函數帶來顫振的影響,將符號函數采用雙曲正切函數近似,即取sgn(x)≈tanh(x/ε4),其中,ε4=0.001.
分別進行無干擾、加入干擾但不補償、加入干擾且補償3種情況的仿真,繪制相關的仿真曲線如圖2~圖5所示.
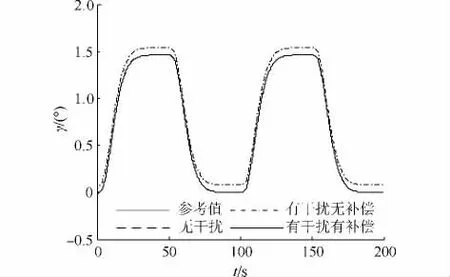
圖2 γ跟蹤曲線
圖2給出了彈道傾角參考信號曲線、無干擾下的跟蹤曲線、考慮干擾但是不加入補償下的跟蹤曲線、考慮干擾且加入補償下的跟蹤曲線.對比曲線可以看出,在考慮干擾但不加入補償下,彈道傾角曲線存在較大的跟蹤誤差,而在加入干擾補償下,能實現對彈道傾角信號的精確跟蹤.
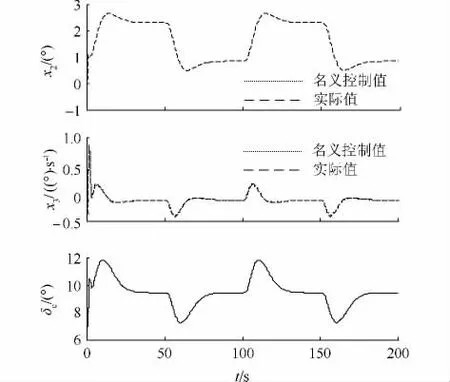
圖3 虛擬控制及輸入曲線
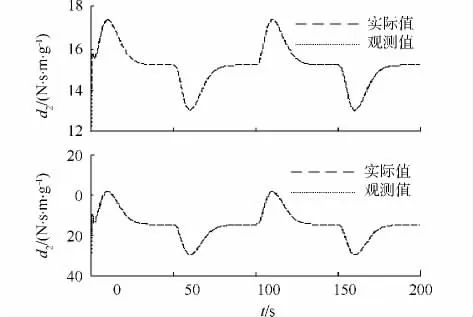
圖4 干擾觀測曲線
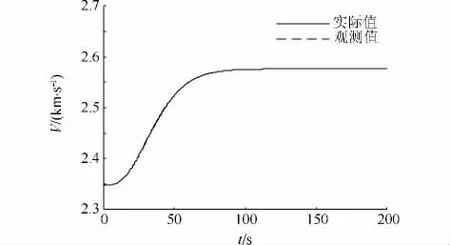
圖5 速度跟蹤曲線
圖3為考慮干擾觀測器且加入干擾補償下的控制舵偏、虛擬控制輸入x2及x3曲線.從圖3中可以看出,控制舵偏在合適的范圍內,虛擬控制輸入精確地跟蹤了名義控制指令,從而驗證了控制器的效果.
圖4分別給出了擴展狀態觀測器對干擾d1及d2的觀測效果,從圖中可以看出,擴展狀態觀測器具有對干擾精確觀測的能力.
圖5給出了速度的跟蹤曲線,從結果可以看出速度回路對參考信號具有很快的響應能力,實現了對速度參考指令的精確跟蹤.
4 結論
從本文的研究結果中得出以下結論:
1)基于反步法原理對高超聲速飛行器縱向通道彈道傾角回路進行控制器設計是可行的,理論及仿真結果驗證了控制器的設計效果;
2)可以將參數不確定性及外部擾動均考慮為干擾,在控制器設計時,采用擴展狀態觀測器對干擾進行觀測并加以補償;
3)干擾觀測的精確與否關系到控制效果,本文采用的擴展狀態觀測器能實現干擾的精確觀測,保證了控制系統的良好性能.
References)
[1]Hu Xiaoxiang,Wu Ligang,Hu Changhua,et al.Adaptive sliding mode tracking control for a flexible air-breathing hypersonic vehicle[J].Journal of the Franklin Institute,2012,349:559 -577
[2]Sigthorsson D O,Jankovsky P,Serrani A,et al.Robust linear output feedback control of an airbreathing hypersonic vehicle[J].Journal of Guidance,Control,and Dynamics,2008,31(4):1052-1066
[3]黃顯林,葛東明.吸氣式高超聲速飛行器縱向機動飛行的魯棒線性變參數控制[J].宇航學報,2010,31(7):1789 -1796 Huang Xianlin,Ge Dongming.Robust parameter-varying control for longitudinal maneuvering flight of air-breathing hypersonic vehicle[J].Journal of Astronautics,2010,31(7):1789 - 1796(in Chinese)
[4]張增輝,楊凌宇,申功璋.高超聲速飛行器大包線切換LPV控制方法研究[J].航空學報,2012,33(9):1706 -1716 Zhang Zenghui,Yang Lingyu,Shen Gongzhang.Switching LPV control method in wide envelope for hypersonic vehicles[J].Acta Aeronautica et Astronautica Sinica,2012,33(9):1706 -1716(in Chinese)
[5]吳宏鑫,孟斌.高超聲速飛行器控制研究綜述[J].力學進展,2009,39(6):756 -765 Wu Hongxin,Meng Bin.Review on the control of hypersonic flight vehicles[J].Advances in Mechanics,2009,39(6):756 -765(in Chinese)
[6]劉燕斌,陸宇平.基于反步法的高超音速飛機縱向逆飛行控制[J].控制與決策,2007,22(3):313 -317 Liu Yanbin,Lu Yuping.Longitudinal inversion flight control based on backstepping for hypersonic vehicle[J].Control and Decision,2007,22(3):313 -317(in Chinese)
[7]李靜,左斌,段洣毅,等.輸入受限的高超聲速飛行器自適應Terminal滑模控制[J].航空學報,2012,33(2):220 -233 Li Jing,Zuo Bin,Duan Miyi,et al.Adaptive terminal sliding mode control for air-breathing hypersonic vehicles under control input constraints[J].Acta Aeronautica et Astronautica Sinica,2012,33(2):220 -233(in Chinese)
[8]黃喜元,王青,董朝陽.基于Backstepping的高超聲速飛行器魯棒自適應控制[J].系統工程與電子技術,2011,33(6):1321-1326 Huang Xiyuan,Wang Qing,Dong Chaoyang.Robust adaptive control of hypersonic vehicles via backstepping method[J].Systems Engineering and Electronics,2011,33(6):1321 -1326(in Chinese)
[9]Parker J T,Serrani A,Yurkovich S,et al.Control-oriented modeling of an air-breathing hypersonic vehicle[J].Journal of Guidance,Control,and Dynamics,2007,30(3):856 -869
[10]Fiorentini L,Serrani A.Adaptive restricted trajectory tracking for a non-minimum phase hypersonic vehicle model[J].Automatica,2012,48:1248 -1261
[11]Xia Yuanqing,Zhu Zheng,Fu Mengyin,et al.Attitude tracking of rigid spacecraft with bounded disturbances[J].IEEE Transactions on Industrial Electronics,2011,58(2):647 -659
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04