軟管錐套式空中加油系統(tǒng)建模與特性分析
2014-12-19 08:59:06王海濤董新民竇和鋒薛建平
北京航空航天大學(xué)學(xué)報(bào) 2014年1期
關(guān)鍵詞:模型
王海濤 董新民 竇和鋒 薛建平
(空軍工程大學(xué) 航空航天工程學(xué)院,西安710038)
基于軟管錐套式空中加油系統(tǒng)(HPARS,Hose-Paradrogue Aerial Refueling System)的軟式自主空中加油(AAR,Automated Aerial Refueling)技術(shù)已受到國內(nèi)外高度關(guān)注[1].然而目前軟式AAR研究通常以隨機(jī)噪聲模擬錐套運(yùn)動(dòng)[2-3].此類HPARS運(yùn)動(dòng)模型無法反映軟管錐套力學(xué)特性和真實(shí)運(yùn)動(dòng)規(guī)律,使軟式AAR研究思路局限于相對(duì)位置的預(yù)測、跟蹤及控制,而對(duì)接過程中HPARS動(dòng)態(tài)響應(yīng)及其對(duì)無人機(jī)對(duì)接影響的研究極為不足,針對(duì)簡化模型開發(fā)的目標(biāo)識(shí)別、對(duì)接控制等方法的有效性必然存在較大局限.
為模擬HPARS動(dòng)態(tài)特性,國外分別從實(shí)驗(yàn)測試和理論分析兩方面提出了多種建模方法.
實(shí)驗(yàn)測試方面,主要采用計(jì)算流體力學(xué)(CFD,Computational Fluid Dynamics)、風(fēng)洞、試飛等方法.波音公司[4]采用CFD方法研究了KC-10加油機(jī)軟管氣動(dòng)特性.文獻(xiàn)[5]通過CFD和風(fēng)洞實(shí)驗(yàn)測試了錐套氣動(dòng)特性.NASA Dryden飛行研究中心在F/A-18軟式AAR項(xiàng)目中完成了一系列HPARS風(fēng)洞和試飛試驗(yàn)[6].這些研究為 HPARS動(dòng)態(tài)建模提供了大量氣動(dòng)特性數(shù)據(jù),但工作量大、成本過高,局限于穩(wěn)態(tài)特性分析,實(shí)驗(yàn)范圍有限.
理論分析方面,主要采用有限元、集中參數(shù)法等原理.文獻(xiàn)[7]從材料力學(xué)角度提出了一種長度恒定的非線性三維彎曲梁有限元軟管錐套模型.該方法理論推導(dǎo)復(fù)雜,計(jì)算量巨大,難以滿足實(shí)時(shí)性要求.文獻(xiàn)[8]采用集中參數(shù)法在鉛垂面內(nèi)建立了軟管錐套二維運(yùn)動(dòng)模型.Kamman[9]根據(jù)集中參數(shù)法提出了一種多級(jí)串聯(lián)“球桿”三維運(yùn)動(dòng)模型.該方法反映了軟管錐套動(dòng)態(tài)特性,但軟管長度恒定,特性分析不夠全面.
國內(nèi)由于缺乏需求牽引,針對(duì)HPARS的研究成果很少且局限于簡化建模與穩(wěn)態(tài)分析,難以滿足軟式 AAR 研究需要[10-11].
針對(duì)現(xiàn)有HPARS模型軟管長度恒定,特性研究不足[9]等問題,本文根據(jù)集中參數(shù)法原理,提出了一種變長度多級(jí)串聯(lián)理想單擺系軟管錐套運(yùn)動(dòng)模型.首先從運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)角度推導(dǎo)了包含軟管收放和外部氣動(dòng)力影響的軟管錐套運(yùn)動(dòng)方程;然后通過數(shù)值仿真驗(yàn)證了模型的有效性并進(jìn)行了充分的特性研究.
1 HPARS特性分析與建模假設(shè)
1.1 HPARS結(jié)構(gòu)特性分析
軟管、錐套是HPARS傳輸燃油和輔助對(duì)接的關(guān)鍵部件.軟管由管狀柔性材料制成,用于傳輸燃油和連接錐套.錐套是產(chǎn)生空氣阻力的主要部位,用于穩(wěn)定軟管和輔助對(duì)接.
軟管特殊的柔性結(jié)構(gòu)決定了HPARS氣動(dòng)特性極為復(fù)雜.平穩(wěn)大氣中錐套阻力、平衡位置隨外部條件影響而大幅變動(dòng);加油機(jī)狀態(tài)變化及尾流干擾將會(huì)導(dǎo)致錐套飄擺;受油機(jī)過量的對(duì)接前移則極易誘發(fā)軟管甩鞭現(xiàn)象.這些復(fù)雜氣動(dòng)特性將大大降低對(duì)接成功率,甚至釀成飛行事故.
因此,HPARS動(dòng)態(tài)建模既要準(zhǔn)確描述軟管錐套結(jié)構(gòu)功能特點(diǎn),更要全面反映自身氣動(dòng)特性.
1.2 建模假設(shè)與坐標(biāo)定義
根據(jù)集中參數(shù)法思想,將HPARS抽象為如圖1所示的長度可變的逐級(jí)串聯(lián)理想單擺系.假設(shè)各段軟管與相應(yīng)擺桿長度相同,質(zhì)量和外力均集中于球形鉸鏈,錐套為固連于軟管末端的質(zhì)點(diǎn).
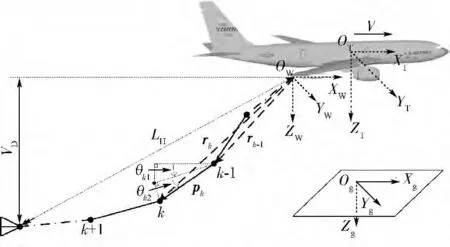
圖1 建模假設(shè)與坐標(biāo)關(guān)系示意圖
如圖1所示,令地平系OgXgYgZg為慣性系.將拖曳點(diǎn)系OWXWYWZW作為建模參考系,其坐標(biāo)軸指向與加油機(jī)航跡系OTXTYTZT平行.定義錐套平衡位置軟管的材料特性和外形結(jié)構(gòu)使繞管身中軸線的扭轉(zhuǎn)運(yùn)動(dòng)可以忽略[7-8].因此第k級(jí)擺桿相對(duì)OWXWYWZW系的偏轉(zhuǎn)可通過擺桿相對(duì)OWXWYW和OWXWZW平面的偏轉(zhuǎn)角θk1和θk2加以描述.
2 HPARS動(dòng)態(tài)建模
2.1 軟管錐套運(yùn)動(dòng)學(xué)分析
如圖1所示,鉸鏈k的空間位置矢量rk在OWXWYWZW系中可表示為

式中pk表示由鉸鏈k-1指向鉸鏈k的距離矢量,在OWXWYWZW系中坐標(biāo)為

式中,Ci=cosθki,Si=sinθki(i=1,2);lk表示第k級(jí)擺桿長度.為描述軟管收放,令lk為變量.
對(duì)式(1)求一、二次導(dǎo)數(shù),可得鉸鏈k運(yùn)動(dòng)速度vk和加速度ak分別為

當(dāng)考慮加油機(jī)姿態(tài)變化影響,即拖曳點(diǎn)系相對(duì)地平系轉(zhuǎn)動(dòng)時(shí),對(duì)式(2)求一、二次導(dǎo)數(shù)可得

易知 pk,θk1·pk,θk2=0 ,則式(5)兩端點(diǎn)乘 pk,θki并將式(3)代入可得
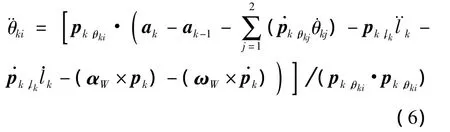

式(6)即為第k段軟管的一般運(yùn)動(dòng)方程,經(jīng)逐級(jí)迭代,該模型即可描述加油機(jī)狀態(tài)變化影響下的軟管長度變化和偏轉(zhuǎn)彎曲.
2.2 軟管錐套動(dòng)力學(xué)分析
由牛頓第二定律知,鉸鏈k的加速度ak為

式中,第k級(jí)單擺質(zhì)量mk=lkμ,μ為單位長度軟管質(zhì)量;tk為第k級(jí)擺桿拉力;Qk為鉸鏈k所受外力,包括定常流(即空速)、加油機(jī)尾流、大氣擾動(dòng)等形成的氣動(dòng)阻力和重力兩部分.
因擺桿拉力是無法直接獲得的系統(tǒng)內(nèi)力,需引入額外約束條件解算.由定義可知pk滿足如下幾何約束:

當(dāng)軟管長度可變,對(duì)式(8)求二次導(dǎo)數(shù)可得

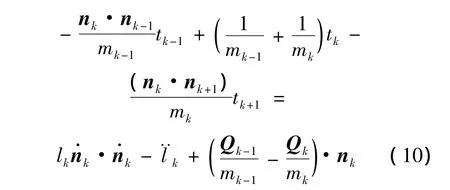
當(dāng)HPARS抽象為N級(jí)單擺系時(shí),將式迭代列寫成A·t=q的矩陣形式為
式中a0為拖曳點(diǎn)相對(duì)地平系的平動(dòng)加速度.a0與式(6)中αW,ωW等牽連轉(zhuǎn)動(dòng)量使該模型完整的體現(xiàn)了加油機(jī)牽連運(yùn)動(dòng)對(duì)軟管錐套運(yùn)動(dòng)的影響.
2.3 軟管錐套外力分析
由受力分析知,式(7)中鉸鏈k所受外力Qk包括第k段軟管重力和空氣阻力Dk兩部分:

式中空氣阻力Dk[4]可表示為
式中,Vk/air=vk-uk,uk為鉸鏈k處定常流、加油機(jī)尾流、大氣擾流等的矢量和;ρ∞為空氣密度;dk為軟管外徑;ct,k,cn,k分別為擺桿 k 切向和法向氣動(dòng)阻力系數(shù).
同理,末級(jí)鉸鏈N所受外力QN為

式中,mdrogue為錐套質(zhì)量;Ddrogue為錐套氣動(dòng)阻力[5]:
式中ddrogue,cdrogue分別為錐套直徑和空氣阻力系數(shù).
綜上可知,第k級(jí)單擺運(yùn)動(dòng)的總體運(yùn)行機(jī)理可概括為圖2所示的變量關(guān)系.
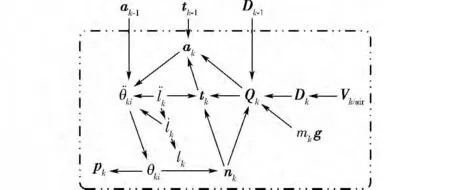
圖2 第k級(jí)單擺的總體運(yùn)行機(jī)理
2.4 模型穩(wěn)定性、適用條件與實(shí)時(shí)性
由上可知,模型穩(wěn)定性、適用條件和實(shí)時(shí)性分別取決于式(11)解的唯一性和計(jì)算量.
穩(wěn)定性證明:對(duì)任意 k(k=1,2,…,N),當(dāng)mk> 0 時(shí),若|nk-1·nk|=1 ,式(11)系數(shù)矩陣A經(jīng)高斯消去易得:若0≤,則A中第k行元素滿足不等式:
即A按行嚴(yán)格對(duì)角占優(yōu),則|A|≠0.因而A可逆,式(11)有且僅有唯一解t=A-1q,即模型穩(wěn)定.
適用條件:模型穩(wěn)定前提為mk>0,又因mk=lkμ,模型適用條件可轉(zhuǎn)化為lk>0,即模型無法實(shí)現(xiàn)軟管完全收回.
實(shí)時(shí)性分析:式(11)為代數(shù)線性方程組避免了通常狀態(tài)方程模型求解的積分運(yùn)算,同時(shí)A為三對(duì)角稀疏矩陣,使模型計(jì)算量低實(shí)時(shí)性好.
3 數(shù)值仿真與特性研究
參數(shù)設(shè)定為:飛行高度7620m,空速500km/h,軟管長度初值 14.33 m,μ =4.11 kg/m,dk=0.067m,ck=0.001,cn,k=0.28,mdrogue=29.5 kg,ddrogue=0.61 m,cdrogue=0.831[10].模型級(jí)數(shù) N 應(yīng)權(quán)衡建模準(zhǔn)確性、實(shí)時(shí)性和軟管長度確定,本文取N=24.
3.1 模型準(zhǔn)確性
為驗(yàn)證模型準(zhǔn)確性,平穩(wěn)大氣中不同空速和高度條件下錐套穩(wěn)態(tài)阻力和平衡位置與NASA[6]和Kamman[9]研究結(jié)果對(duì)比如圖3、圖4所示.
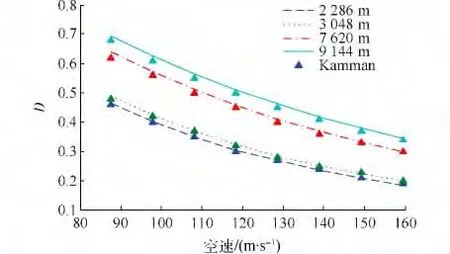
圖3 平穩(wěn)大氣中錐套穩(wěn)態(tài)阻力特性
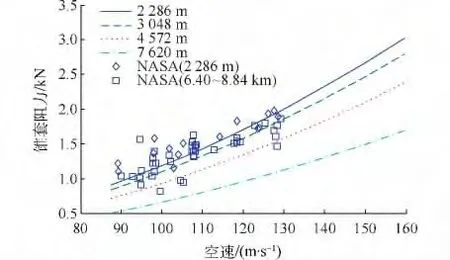
圖4 平穩(wěn)大氣中錐套平衡位置特性
由圖3、圖4可知,仿真結(jié)果與NASA實(shí)驗(yàn)、Kamman研究結(jié)果基本吻合,模型準(zhǔn)確性較好.
3.2 軟管外放特性
HPARS軟管收放能力是控制錐套位置、保持軟管拉力防止甩鞭現(xiàn)象的最有效方法,也是開展軟式AAR研究的必要前提.
假設(shè)平穩(wěn)大氣中,加油機(jī)勻速平飛,t=10 s時(shí)軟管按圖5b中加速度逐漸放出10m.外放過程中軟管形態(tài)和錐套位置變化分別如圖5a和圖5c所示.第1、第13、第24段軟管空氣阻力和拉力變化如圖6所示.
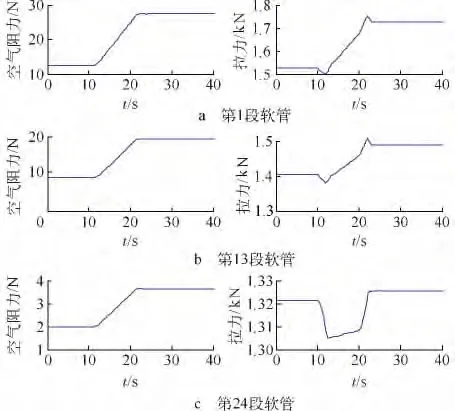
圖6 軟管外放時(shí)軟管空氣阻力與拉力響應(yīng)
仿真結(jié)果表明,外放初期(10~12.8 s),軟管拉力對(duì)長度變化更敏感,使各段拉力短暫下降;外放中(12.8~23 s),各段軟管長度和質(zhì)量逐漸增加,進(jìn)而空氣阻力和拉力隨之增大;穩(wěn)態(tài)時(shí)(0~10 s與23 s~∞ ),沿管身向下軟管逐漸趨向水平,其空氣阻力逐漸減小.由于質(zhì)量和外力的累加效應(yīng),拉力沿管身向上逐漸增大.因此,該模型能夠準(zhǔn)確描述軟管收放過程的柔性形態(tài)變化和力學(xué)特性.
3.3 外部擾動(dòng)特性
深入掌握外部干擾作用下HPARS動(dòng)態(tài)特性可有效提高軟式AAR對(duì)接成功率.此類特性研究風(fēng)險(xiǎn)高難度大,CFD、風(fēng)洞、試飛等方法往往難以勝任.因此,針對(duì)加油機(jī)滾轉(zhuǎn)運(yùn)動(dòng)和尾流干擾作用的影響仿真研究如下.3.3.1 加油機(jī)滾轉(zhuǎn)運(yùn)動(dòng)影響
假設(shè)t=30 s時(shí)加油機(jī)按圖7a、圖7c、圖7e中規(guī)律滾轉(zhuǎn)至φ =9°.該過程中第1、第13、第24段軟管拉力響應(yīng)和錐套飄擺軌跡如圖7b、圖7d、圖7 f和圖8所示.
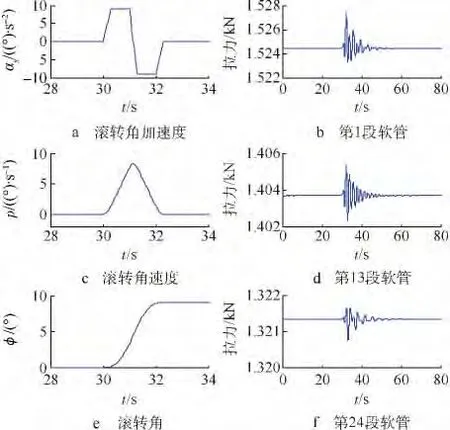
圖7 加油機(jī)滾轉(zhuǎn)規(guī)律與軟管拉力響應(yīng)
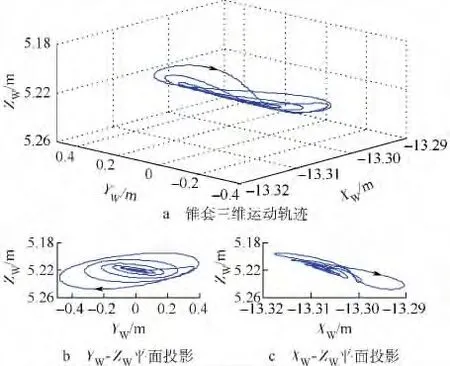
圖8 加油機(jī)滾轉(zhuǎn)影響下的錐套飄擺軌跡
由圖7、圖8可知,加油機(jī)滾轉(zhuǎn)運(yùn)動(dòng)將使錐套圍繞平衡位置旋轉(zhuǎn)飄擺,其水平擺幅明顯大于鉛垂方向.若加油機(jī)存在頻繁滾轉(zhuǎn)擾動(dòng),這種旋轉(zhuǎn)飄擺會(huì)持續(xù)存在且擺幅不斷加大,將嚴(yán)重影響受油機(jī)對(duì)接操縱.旋轉(zhuǎn)飄擺過程中軟管拉力擾動(dòng)的幅值和持續(xù)時(shí)間與加油機(jī)狀態(tài)變化直接相關(guān),當(dāng)加油機(jī)穩(wěn)定后,拉力擾動(dòng)也將逐漸消失.
3.3.2 加油機(jī)尾流影響
加油機(jī)尾流由機(jī)翼和尾翼的翼尖渦流、機(jī)身紊流、大氣擾流等組成,機(jī)翼渦流是其最主要成分.仿真采用 Hallock-Burnham機(jī)翼渦流模型[12]近似模擬加油機(jī)尾流.設(shè)定加油機(jī)翼展39.88 m,HPARS距右翼尖2.85 m,則加油吊艙后方10 m處的尾渦流場仿真結(jié)果如圖9所示.
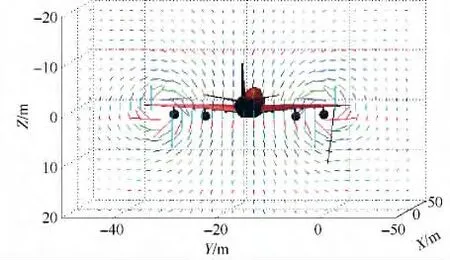
圖9 加油吊艙后方10 m處的尾渦流場
當(dāng)t=30 s時(shí)軟管按圖5b中加速度放出10 m.加油機(jī)尾流影響下,軟管錐套運(yùn)動(dòng)過渡過程及形態(tài)變化如圖10所示,第1、第13、第24段軟管阻力和拉力如圖11所示.
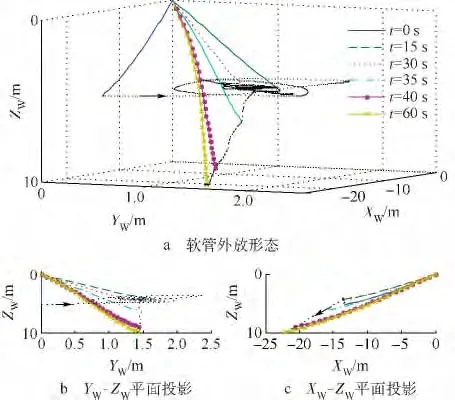
圖10 加油機(jī)尾流中軟管外放形態(tài)變化
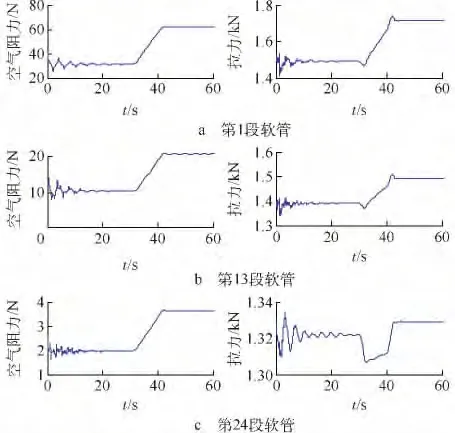
圖11 加油機(jī)尾流中軟管外放時(shí)的阻力與拉力
對(duì)比圖5可知,0~30 s時(shí),軟管錐套受加油機(jī)尾流影響逐漸偏移至新平衡位置.軟管空氣阻力和拉力震蕩是由θki的初值與穩(wěn)態(tài)值的差異所致;30~60 s時(shí),軟管在新平衡位置逐漸放出,錐套右偏達(dá)1.43 m.此時(shí)軟管阻力和拉力變化規(guī)律與圖6所示定常流中軟管放出情況基本一致.
實(shí)際加油機(jī)尾流包含大量非穩(wěn)定風(fēng)干擾,軟管錐套會(huì)持續(xù)飄擺.而Hallock-Burnham模型是針對(duì)尾流主要成分的簡化模擬,本質(zhì)上是穩(wěn)定的有旋風(fēng)場,因此仿真結(jié)果最終趨于穩(wěn)定.
3.4 甩鞭現(xiàn)象
受油機(jī)過大的對(duì)接前移導(dǎo)致軟管過度松弛而引發(fā)甩鞭現(xiàn)象是造成空中加油事故的主要原因.準(zhǔn)確的對(duì)接過程仿真可有效輔助無人機(jī)自主對(duì)接路徑規(guī)劃,避免軟管甩鞭.因此,在圖9所示的加油機(jī)尾流中,假設(shè)t=50 s時(shí)受油機(jī)開始按圖12a、圖12c、圖12e中相對(duì)運(yùn)動(dòng)規(guī)律繼續(xù)前移完成對(duì)接.對(duì)接過程中受油插頭受力如圖12b、圖12d、圖12f所示.軟管形態(tài)變化如圖13所示.第1、第13、第24段軟管的空氣阻力和拉力如圖14所示.
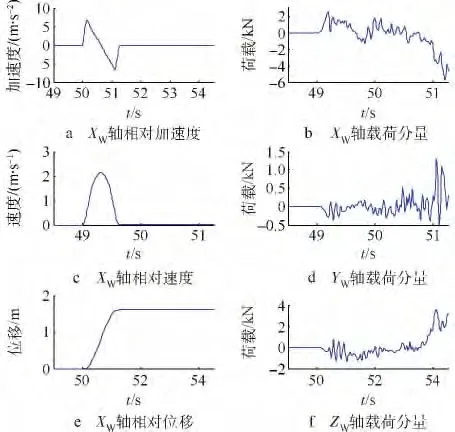
圖12 受油機(jī)相對(duì)運(yùn)動(dòng)規(guī)律與受油插頭受力
由仿真結(jié)果可知,隨受油機(jī)對(duì)接后繼續(xù)前移,軟管出現(xiàn)過度松弛劇烈甩動(dòng),靠近受油插頭的軟管拉力急劇增大,即誘發(fā)了軟管甩鞭現(xiàn)象.
甩鞭現(xiàn)象產(chǎn)生機(jī)理如下:由于受油機(jī)對(duì)接后前進(jìn)距離過大,使軟管松弛拉力快速下降,進(jìn)而空氣阻力使錐套附近軟管發(fā)生甩動(dòng).軟管彈性拉力和空氣阻力的交替作用逐漸使振幅不斷增大,甩動(dòng)傳遍整條軟管,最終導(dǎo)致連接錐套的末端軟管拉力持續(xù)增大.受油插頭所受拉力也隨之急劇增加,非軸向力震蕩劇烈.加油機(jī)尾流強(qiáng)烈的干擾作用將進(jìn)一步惡化甩鞭現(xiàn)象,極易造成軟管或受油插頭斷裂,引發(fā)飛行事故.
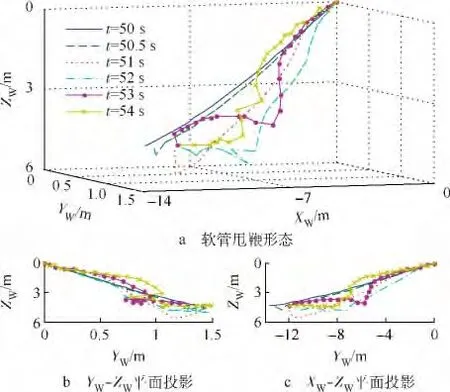
圖13 加油機(jī)尾流中對(duì)接導(dǎo)致的甩鞭現(xiàn)象
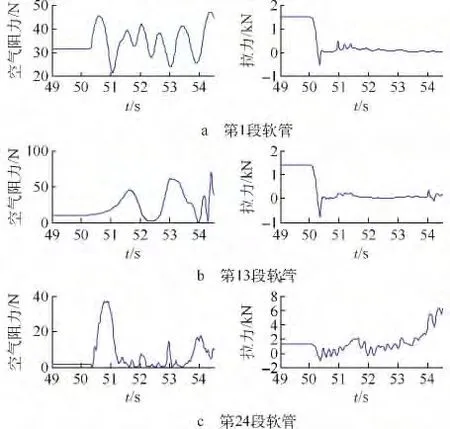
圖14 對(duì)接甩鞭時(shí)軟管空氣阻力與拉力
4 結(jié)論
本文考慮加油機(jī)運(yùn)動(dòng)、尾渦流場、大氣擾動(dòng)等影響推導(dǎo)了變長度軟管運(yùn)動(dòng)方程,由軟管拉力的代數(shù)線性方程組的性質(zhì)證明了模型穩(wěn)定性和實(shí)時(shí)性,使所建模型全面反映了HPARS運(yùn)動(dòng)規(guī)律和力學(xué)特性.數(shù)值仿真驗(yàn)證了模型有效性,并深入研究了軟管收放、外部擾動(dòng)和甩鞭現(xiàn)象等特性.
該模型彌補(bǔ)了現(xiàn)有建模方法的不足,可有效輔助HPARS生產(chǎn)制造和特性研究,并可作為通用平臺(tái)應(yīng)用于軟式AAR技術(shù)開發(fā).
References)
[1]董新民,徐躍鑒,陳博.自動(dòng)空中加油技術(shù)研究進(jìn)展與關(guān)鍵問題[J].空軍工程大學(xué)學(xué)報(bào):自然科學(xué)版,2008,9(6):1 -5 Dong Xinmin,Xu Yuejian,Chen Bo.Progress and challenges in automatic aerial refueling[J].Journal of Air Force Engineering U-niversity:Natural Science Edition,2008,9(6):1 -5(in Chinese)
[2]Tandale M D,Bowers R,Valasek J.Trajectory tracking controller for vision-based probe and drogue autonomous aerial refueling[J].Journal of Guidance Control and Dynamics,2006,29(4):846-857
[3]王宏倫,杜熠,蓋文東.無人機(jī)自動(dòng)空中加油精確對(duì)接控制[J].北京航空航天大學(xué)學(xué)報(bào),2011,37(7):822 -826 Wang Honglun,Du Yi,Gai Wendong.Precise docking control in unmanned aircraft vehicle automated aerial refueling[J].Journal of Beijing University of Aeronautics and Astronautics,2011,37(7):822-826(in Chinese)
[4]Vassberg J C,Yeh D T,Blair A J,et al.Numerical simulations of KC-10 wing-mount aerial refueling hose-drogue dynamics with a reel take-up system[C]//21st Applied Aerodynamics Conference.Orlando:AIAA,2003:1 -22
[5]Ro K,Basaran E,Kamman J W.Aerodynamic characteristics of paradrogue assembly in an aerial refueling system[J].Journal of Aircraft,2007,44(3):963 -970
[6]Vachon M J,Ray R J.Calculated drag of an aerial refueling assembly through airplane performance analysis[C]//42nd AIAA Aerospace Sciences Meeting.Reno:AIAA,2004:1 -18
[7]Zhu Zhenghong,Meguid S A.Modeling and simulation of aerial refueling by finite element method[J].International Journal of Solids and Structures,2007,44:8057 -8073
[8]Ribbens W B,Saggio F,Wierenga R,et a1.Dynamics modeling of an aerial refueling hose& drogue system[C]//25th Applied Aerodynamics Conference.Miami:AIAA,2007:1 -10
[9]Ro K,Kamman J W.Modeling and simulation of hose-paradrogue aerial refueling systems[J].Guidance Control and Dynamics,2010,33(1):53 -63
[10]胡孟權(quán),柳平,聶鑫,等.大氣紊流對(duì)空中加油軟管錐套運(yùn)動(dòng)的影響[J].飛行力學(xué),2010,28(5):20 -23 Hu Mengquan,Liu Ping,Nie Xin,et al.Influence of air turbulence on the movement of hose-drogue[J].Flight Dynamics,2010,28(5):20 -23(in Chinese)
[11]張雷雨,張洪,楊洋,等.空中加油對(duì)接過程的動(dòng)力學(xué)建模與仿真[J].航空學(xué)報(bào),2012,33(7):1347 -1354 Zhang Leiyu,Zhang Hong,Yang Yang,et al.Dynamics modeling and simulation of docking process in aerial Refueling[J].Acta Aeronautica et Astronautica Sinica,2012,33(7):1347 -1354(in Chinese)
[12]陳博,董新民,徐躍鑒,等.加油機(jī)尾流場建模及受油機(jī)飛行安全性分析[J].系統(tǒng)仿真學(xué)報(bào),2008,20(8):1994 -2002 Chen Bo,Dong Xinmin,Xu Yuejian,et al.Modeling of tanker’s wake field and flight safety analysis of receiver aircraft[J].Journal of System Simulation,2008,20(8):1994 - 2002(in Chinese)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19