高速公路智能型多功能清潔車研發(fā)
2015-01-12 05:59:44羅二娟
山西交通科技 2015年5期
羅二娟
(山西省交通科學研究院,山西 太原 030006)
0 引言
隨著我國高速公路大量建成通車,路面、隧道、橋梁及其附屬設(shè)施的日常保潔任務(wù)越來越艱巨。為確保車輛運行環(huán)境良好,保證行車安全,許多技術(shù)先進且自動化程度較高的道路清掃車、綠籬車、護欄清洗車、高速公路隧道清洗車等陸續(xù)投入工程應(yīng)用,其結(jié)果在很大程度上提高了道路保潔效果和效率。但縱觀目前我國高速公路養(yǎng)護的整體作業(yè)水平還較低,不少地區(qū)(尤其是交通流較少的偏遠地段)主要還依靠人工清潔完成作業(yè)。即使是正在使用的清洗設(shè)備,也存在較為嚴重的單一作業(yè)、配套不全和作業(yè)效率有待提高的問題。有鑒于此,基于高速公路及隧道清潔工程的急需,研發(fā)一代智能型多功能綜合清潔車是十分必要的,這對于迅速提高我國高速公路的保潔能力,進而提高我國高速公路的整體養(yǎng)護和管理水平具有重要意義。
本文提出一款新型的高速公路智能型多功能綜合清潔車的設(shè)計構(gòu)思,它集草坪修剪、高枝修剪、隧道清洗、標識牌清洗、邊坡清洗等功能于一體,實現(xiàn)一車多用。由于自動化程度高,能夠達到智能型多功能節(jié)能環(huán)保的效果。整車具有較強的針對性、實用性和推廣價值。
1 國內(nèi)外現(xiàn)狀及分析
從高速公路出現(xiàn)直至目前,研究各種高性能清潔設(shè)備,以保障道路整潔與安全一直是世界各國,特別是工業(yè)發(fā)達國家特別關(guān)注的焦點。這些技術(shù)裝備主要有綠籬機、隧道清洗車、高枝修剪車等等,德國等先進國家近年推出的多功能臂架懸掛式修剪機可修剪高達7 m的綠籬,還可以修剪道路、河流等堤岸兩側(cè)的雜草和灌木叢[1-2]。
現(xiàn)有的隧道清洗車分高壓水清洗車和滾刷式清洗車。高壓水清洗車無法在短時間內(nèi)清潔污漬,作業(yè)效率低,還需要大量的水源,單次作業(yè)里程短,同時隧道內(nèi)會積水,影響行車安全[3]。滾刷式隧道清洗車可以避免水源浪費以及高壓水對隧道墻面的沖擊破壞,節(jié)能環(huán)保。
20世紀70年代前,防撞護欄、隔離欄及路標識牌一直依靠人力清洗,勞動強度大、勞動效率低、且干擾交通。此后國外開始嘗試機械作業(yè)車,主要有德國慕迪卡和美國福特。80年代初,美國福特公司研制了防撞護欄清洗設(shè)備,它是在輪式行走底盤的前橋上懸掛作業(yè)裝置,采用機械傳動,以單刷射水方式作業(yè)[4]。目前國內(nèi)也引進了德國的設(shè)備,但造價高、維修困難。我國也開始研制或使用護欄清洗車,主要有山西交科、遼寧鞍山森遠、北京澤通等。
2 新型智能多功能清潔車
綜上所述,國內(nèi)外有眾多功能各異的專用修剪、清洗、養(yǎng)護類機械設(shè)備,道路養(yǎng)護、清潔已基本實現(xiàn)機械化,但對集綠籬、高枝修剪,隧道清洗,護欄、標識牌、隔聲屏障清洗等于一體的功能齊全、結(jié)構(gòu)簡單、操作方便且自動化程度高的綜合養(yǎng)護清潔設(shè)備研究和開發(fā)很少。
鑒于高速公路發(fā)展趨勢和國內(nèi)外高速公路清潔設(shè)備的需求,本文提出研發(fā)一款智能型多功能籬欄隧道綜合清潔車,其設(shè)計思想和基本功能不僅能夠通過快速換裝工作裝置的方式實現(xiàn)綠籬、高枝修剪,護欄、標識牌、屏障清洗,隧道清洗等功能,而且具有實時監(jiān)控系統(tǒng),操作更加簡單化和人性化,其工作裝置采用前懸掛方式,即將通用操作臂固定于承載車前車架上。通過更換通用操作臂操作手的結(jié)構(gòu)實現(xiàn)不同功能。顯然,綜合性能和多功能作業(yè)是其主要技術(shù)特征。
3 新型智能多功能清潔車通用操作臂設(shè)計
3.1 通用操作臂結(jié)構(gòu)
通用操作臂部分是串聯(lián)機械手結(jié)構(gòu),是一個開式運動鏈,由移動關(guān)節(jié)—轉(zhuǎn)動關(guān)節(jié)—轉(zhuǎn)動關(guān)節(jié)—轉(zhuǎn)動關(guān)節(jié)—轉(zhuǎn)動關(guān)節(jié)—轉(zhuǎn)動關(guān)節(jié)組成,具有6個自由度。操作臂的一端固定在基座(清潔車)上,另一端是自由的,安裝著操作手(刀頭),用以操作刀頭完成各種修剪和清洗作業(yè)。關(guān)節(jié)由液壓缸驅(qū)動,關(guān)節(jié)的相對運動導(dǎo)致連桿的運動,使刀頭到達相應(yīng)的位姿。同時通過傳感器智能實時監(jiān)控,使操作更加簡單化、人性化。
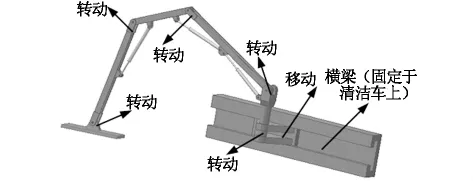
圖1 操作臂結(jié)構(gòu)
3.2 通用操作臂運動學分析
為了便于控制,需研究操作臂中各連桿之間的位移關(guān)系。具體方法是在每個連桿上固連一個坐標系,然后描述這些坐標系之間的關(guān)系。運動學分析有多種方法,本文采用D-H法,推導(dǎo)操作手相對于基座的齊次變換矩陣,研究操作臂的運動方程。首先建立操作臂連桿坐標系如圖2所示。
根據(jù)各連桿坐標系,給出操作臂連桿參數(shù)如表1所示。
通過連桿參數(shù),計算出各個連桿間的坐標變換矩陣見公式(1)~公式(6)。
根據(jù)公式(1)~公式(6)計算出通用操作臂變換矩陣見公式(7)。

圖2 操作臂連桿坐標系
因操作手(刀頭)與連桿6固連,故通過公式(7)即可計算出刀頭相當于基座之間的坐標關(guān)系,從而得出操作臂的運動學方程,通過各關(guān)節(jié)傳感器的輸出,可以得出各個關(guān)節(jié)變量的值,給定基座坐標,乘以公式(7),從而求出操作手(刀頭)的坐標,用以控制操作手(刀頭)到達相應(yīng)的位置進行修剪和清潔工作。
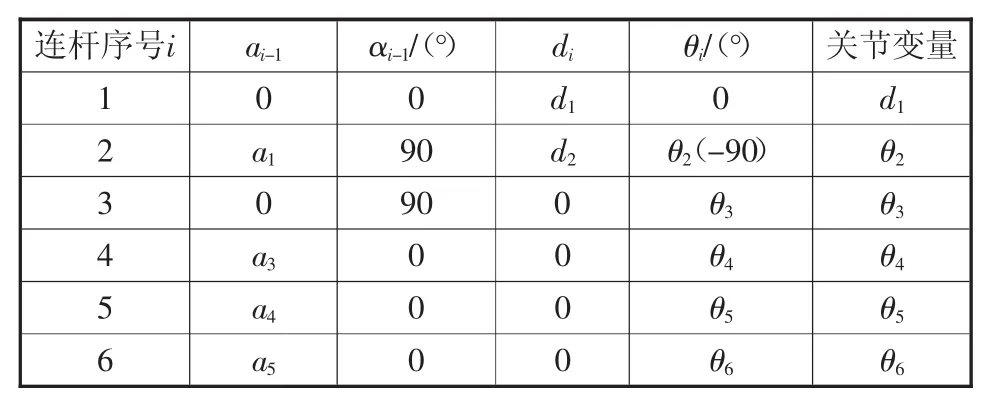
表1 操作臂連桿參數(shù)


4 智能新型清潔車功能及刀頭介紹
智能新型多功能清潔車主要有以下幾方面的功能,見圖3。

圖3 新型清潔車主要功能
a)高速公路草坪修剪(公路路基邊坡草坪修剪、公路路肩以及中央分隔帶草皮或綠化帶波形護欄及立柱處草坪、灌木修剪),草坪修剪刀頭與通用操作臂間通過轉(zhuǎn)動副相連,刀頭可以旋轉(zhuǎn),以對有坡度的草坪進行修剪,并且通過旋轉(zhuǎn)可以繞過護欄進行修剪作業(yè)。
b)高枝修剪,可以修剪高達7 m的樹枝,刀頭設(shè)計成鋸齒狀,和樹枝結(jié)構(gòu)相似,有利于修剪;同時刀頭長度較長,可以同時修剪多根樹枝,修剪范圍大,修剪效率高。
c)邊坡清洗,清洗高速公路路邊邊坡及路沿,刀頭為毛刷形式,刀頭可以繞通用操作臂旋轉(zhuǎn),運動靈活。
d)隧道清洗,采用滾刷式隧道清洗模式,滾刷可以繞通用操作臂旋轉(zhuǎn),用以實現(xiàn)清洗隧道壁、隧道頂和隧道地面的清洗。
e)標識牌、隔聲屏障、護欄清洗等,刀頭采用滾筒模式,滾筒可以繞自身軸線高速旋轉(zhuǎn),以達到清洗的目的。同時,通過控制通用操作臂,可以調(diào)節(jié)清潔滾筒的高低,用以實現(xiàn)對護欄、標識牌和隔聲屏障等的清洗。
5 結(jié)論
本文通過分析國內(nèi)外現(xiàn)有高速公路清潔設(shè)備研究狀況以及市場需求,提出了一款新型智能多功能清潔車的設(shè)計構(gòu)思,該清潔車具有多功能、智能化、實時監(jiān)控等優(yōu)點。同時對該清潔車的通用操作臂進行了結(jié)構(gòu)分析和運動學計算,為整機的操控系統(tǒng)和作業(yè)裝置的結(jié)構(gòu)設(shè)計提供了必要的技術(shù)依據(jù)。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
建材發(fā)展導(dǎo)向(2021年20期)2021-11-20 05:43:18
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
小學閱讀指南·低年級版(2017年11期)2017-12-06 15:14:59
故事大王(2016年7期)2016-09-22 17:30:08
中國交通信息化(2016年9期)2016-06-06 07:42:10
小說月刊(2014年4期)2014-04-23 08:52:20
河南科技(2014年18期)2014-02-27 14:15:06
兒童故事畫報(2013年3期)2013-06-24 05:40:30
