駐波型直線超聲波電動機分析與測試
2015-01-13 01:55:16蔣春容張津楊陸旦宏張小蓮
微特電機 2015年12期
蔣春容,張津楊,陸旦宏,張小蓮
(南京工程學院,南京211167)
0 引 言
超聲波電動機結構設計靈活,利用不同的壓電陶瓷極化形式和彈性體的振動模態,可以構造出不同結構的超聲波電動機[1-5],直線超聲波電動機是其中的一種。從結構上看,直線超聲波電動機也有多種不同的類型。Wang Hong-xiang 等[6]提出了一種梁式結構的直線超聲波電動機,該電機的上下兩個直梁分別粘貼有兩組壓電陶瓷,通過施加一定頻率的電壓激勵出定子的駐波運動,兩個動子通過一定的預壓力分別與兩側的定子齒接觸。Huang Weiqing 等[7]提出了一種直線超聲波電動機,電機的定子由兩個縱向振動的作動器組成,兩個作動器頂端通過一個半圓形結構連接在一起,驅動足放置在半圓結構的外側,驅動與之接觸的滑塊作直線運動。直線超聲波電動機作為超聲波電動機的重要分支,除具有超聲波電動機的低速大力矩、動態響應快、不受電磁場影響等優點外,還具有無需絲桿機構運動轉換直接輸出直線運動、結構簡單等優點[8],作為控制系統執行元件在微機電系統中應用前景廣闊[9]。
本文研究一種駐波型直線超聲波電動機,首先分析其結構和工作原理,進而用解析法建立電機金屬彈性體的振動模型,分析其自由振動的模態和頻率,并與有限元法分析結果進行比較,接著對樣機進行了阻抗-頻率特性測試以驗證理論分析結果,最后設計了一種電接觸測試法,對電機的驅動足與地面的接觸狀態進行了研究。
1 電機的結構與工作原理
所研究的駐波型直線超聲波電動機的結構如圖1 所示。電機的振動體可視為一個矩形等截面金屬梁,梁的上表面黏結有一片壓電陶瓷,下表面有兩個驅動足,整個電機為一個動子,電機工作模態為橫向一階彎曲振動模態,振動時為自由-自由邊界條件。對于自由-自由的梁,在以橫向一階彎曲振動模態工作時,梁上的兩個節點A、B 的橫向位移為零。將驅動足1 設置在節點A 的左邊,驅動足2 設置在節點B 的左邊,但不超過梁的中點。當在壓電陶瓷上施加激勵電壓時,設電機首先中間向上拱起,則驅動足1 受到向右下方的推力,與地面接觸,驅動足2 受到向左上方的拉力,與地面逐漸脫離,驅動足1 底部摩擦力大于驅動足2 的摩擦力,則電機向左移動一步;接下來電機中間下凹兩端上翹,驅動足1 受到向左上方的拉力,逐漸與地面脫離,驅動足2 受到向右下方的推力,與地面接觸,電機繼續向左移動一步。通過適當選擇兩個驅動足的位置,可以使電機工作在橫向一階彎曲振動模態時往左行進,工作在橫向二階彎曲振動模態時往右行進,從而通過改變驅動電壓的頻率而改變電機的運行方向,實現電機的雙向運行。
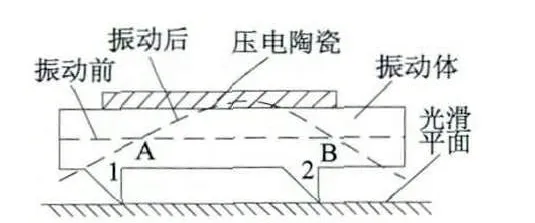
圖1 駐波型直線超聲波電動機的結構
2 電機的振動分析
采用解析法對電機振動體進行振動分析,以確定電機的振動模態和對應的頻率。對于矩形等截面梁,橫向彎曲自由振動的方程[10]:

式中:w(x,t)為梁橫向振動的位移;E,I,ρ 和A 分別為彈性模量、截面慣性矩、密度和截面積。式(1)的解可用變量分離法得到:

將式(2)代入式(1)整理可得:

式中:ω 為角頻率。式(3)可寫為兩個方程:
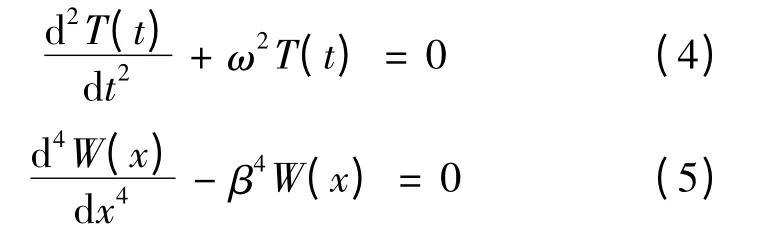
式中:

滿足式(4)的解:

常數B1和B2由初始條件決定。式(5)的解可寫:

式中:C1,C2,C3和C4均為常數,由邊界條件決定。電機振動體可視為自由-自由梁,其邊界條件:
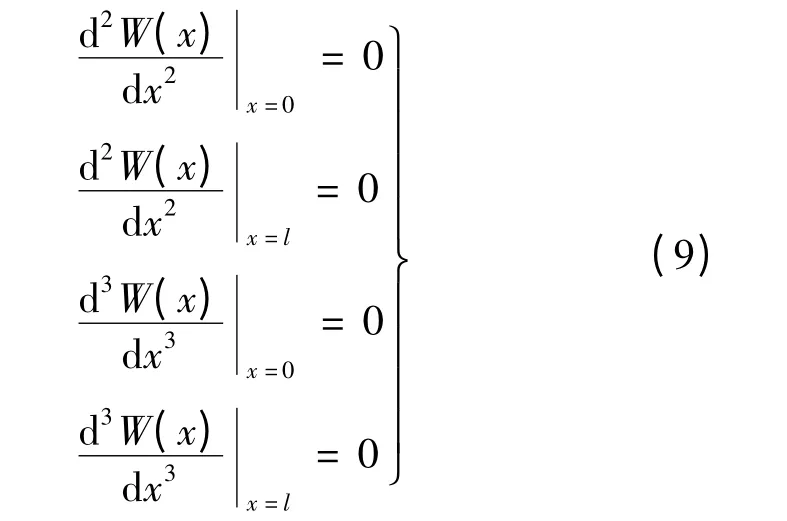
式中:l 為梁的長度。根據以上邊界條件有:
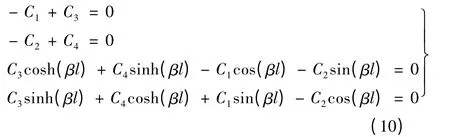
式(10)又可簡化:

要使C1和C2有非零解,必須使式(11)的系數行列式為0,即:

化簡式(12)可得:

求解式(13)可得β 值,進而可以由式(6)和式(8)求得自由振動的角頻率和對應的模態:
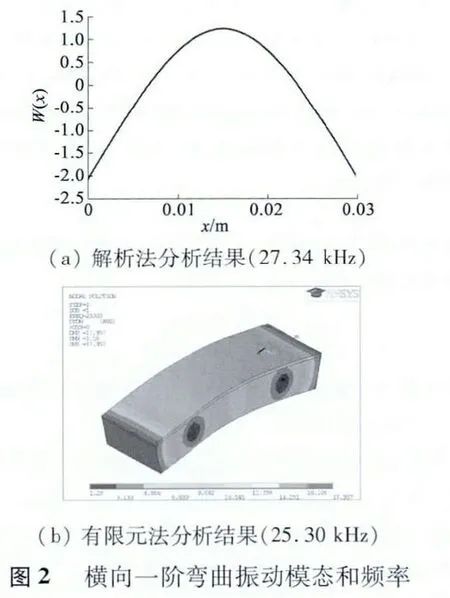
采用建立的解析模型對直線超聲波電動機的振動進行分析。電機金屬彈性體的材料采用鋼,其彈性模量為180 GPa,密度為7 850 kg/m3,壓電陶瓷采用0.5 mm 厚的PZT-502。金屬等直梁的長×寬×高尺寸為30 mm×10 mm×5 mm,忽略PZT 的影響,計算得到金屬彈性體橫向一階彎曲自由振動的頻率為27.34 kHz,對應的振動模態解析法分析如圖2(a)所示。同時也采用有限元分析軟件ANSYS 對該電機進行模態分析,結果如圖2(b)所示,電機的橫向一階彎曲自由振動的頻率為25.30 kHz。解析法和有限元法分析結果存在差異,主要原因在于解析法忽略了PZT 的影響,而有限元法將PZT 也考慮在內了;另外,有限元法分析時建立的是三維實體模型,采用了SOLID5 單元劃分網格,而不是二維梁單元模型,而解析法建立的是二維的等截面梁振動模型。
3 實驗測試
制作的超聲波電動機樣機如圖3 所示。考慮到加工的方便性,金屬彈性體和驅動足是分開加工的,最后將驅動足粘貼在金屬彈性體上。這樣做可以方便地調整兩個驅動足的位置,以研究驅動足粘貼在不同位置時電機的性能。
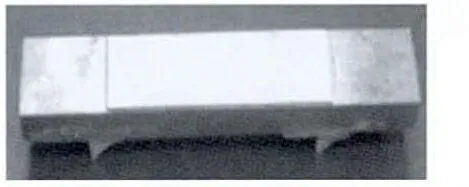
圖3 駐波型直線超聲波電動機樣機
首先對制作的電機樣機進行阻抗-頻率特性測試,采用美國Agilent 公司的阻抗特性分析儀(型號4294A),設定掃頻范圍為20 ~50 kHz,結果如圖4所示。圖4(a)為電機未粘貼兩個驅動足時的阻抗-頻率特性,圖4(b)為粘貼上兩個驅動足后的阻抗-頻率特性。粘貼驅動足前,電機的橫向一階彎曲振動的頻率為26. 94 kHz,與理論分析結果接近。粘貼上驅動足后,頻率降為25.15 kHz,說明驅動足對電機的共振頻率有較大的影響。測試結果表明,驅動足的位置越靠近振動節點,對振動頻率的影響越小。
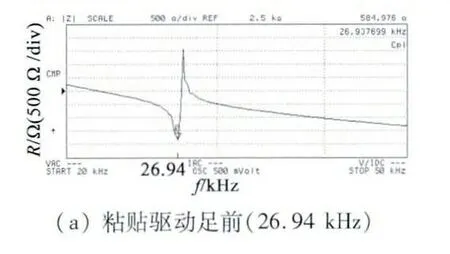
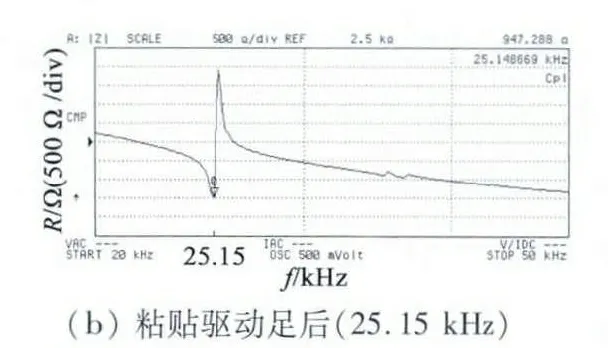
圖4 駐波型直線超聲波電動機的阻抗-頻率特性
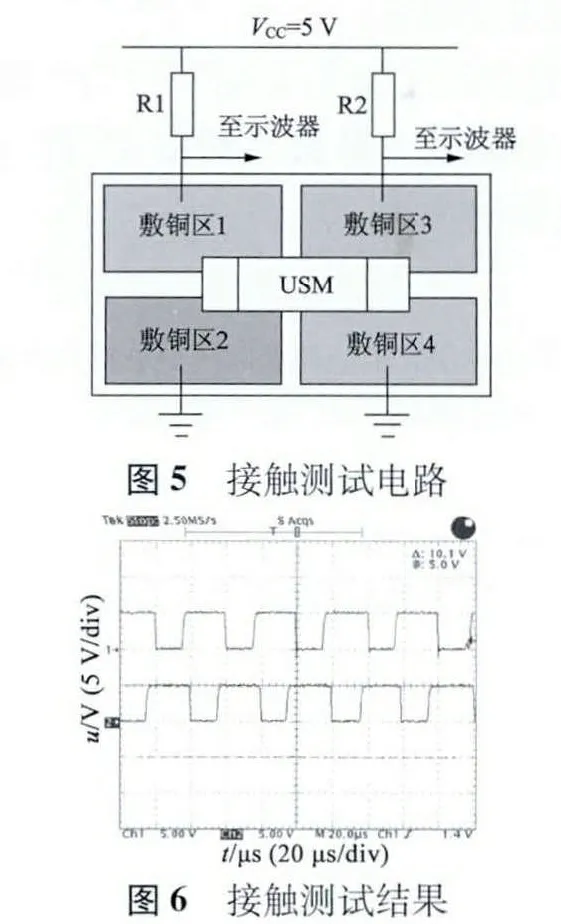
為了解兩個驅動足的驅動狀態,設計了如圖5所示的電路對驅動足進行接觸測試。圖5 中,在印制電路板上設置4 個敷銅區,驅動足1 橫跨在敷銅區1 和2 之間,驅動足2 橫跨在敷銅區3 和4 之間,當驅動足著地時,示波器顯示低電平信號,當驅動足抬離地面時,示波器顯示高電平信號。施加在超聲波電動機上的電壓信號由信號發生器產生正弦電壓信號,經過高頻功率放大器放大后得到,放大后的電壓幅值為15 V,頻率為25 kHz,此時超聲波電動機的行進速度約為4 cm/s。兩個驅動足的接觸測試結果如圖6 所示,每個驅動足與測試電路板接觸的時間約為振動周期的40%,且兩個驅動足與電路板是交替接觸的。通過變換驅動足的位置進行測試表明,驅動足的粘貼位置越靠近振動節點,接觸時間越長,電機行進速度越慢。
4 結 語
本文研究了一種駐波型直線超聲波電動機,建立了電機振動的解析模型,求得電機橫向一階彎曲振動的頻率,同時用有限元法對電機的振動特性進行了分析,制作了電機樣機,并對樣機進行了阻抗-頻率特性測試。測試結果與理論分析的結果相吻合,測試結果也表明,驅動足對電機的共振頻率有影響,驅動足的位置越靠近振動的節點,對振動頻率的影響越小。最后設計了一種電接觸測試的方法,對電機兩個驅動足的接觸狀態進行了實驗研究,結果表明,驅動足越靠近振動節點,與地面接觸的時間越長,電機行進速度越慢。
[1] LE A Y,MILLS J K,BENHABIB B. Improved linear ultrasonic motor performance with square-wave based driving-tip trajectory[J]. Smart Materials and Structures,2015,24(3):1-7.
[2] LIU Yingxiang,CHEN Weishan,FENG Peilian,et al. A square-type rotary ultrasonic motor with four driving feet[J].Sensors and Actuators A:Physical,2012,180:113-119.
[3] 李霞,張三川,陳維山.三波諧波摩擦傳動超聲波電動機理論研究[J].微特電機,2011,39(5):1-4,21.
[4] 彭太江,伍曉宇,梁雄,等.螺旋葉片轉子超聲電機運動特性分析與測試[J].中國電機工程學報,2014,34(26):4534-4538.
[5] 謝天,周鐵英,陳宇. 一種雙轉子模態轉換型超聲波電動機的設計[J].微特電機,2009,37(10):18-21.
[6] WANG Hongxiang,HU Jing,MA Yuanyuan,et al. Research of a piezoelectric driving linear movement device[J].Advanced Materials Research,2011,299/300:1099-1102.
[7] HUANG Weiqing,WANG Yin.A novel ultrasonic motor using longitudinal vibration of bar with varying section[J].Advanced Materials Research,2012,354/355:527-530.
[8] 陳強,徐志科,蔣春容,等.雙足驅動雙壓電晶片直線超聲波電動機運行機理研究[J].振動與沖擊,2014,33(22):21-25.
[9] WAI Rongjong,SU Kuoho.Supervisory control for linear piezoelectric ceramic motor drive using genetic algorithm[J]. IEEE Transactions on Industrial Electronics,2006,53(2):657-673.
[10] 李欣業,張明路.機械振動[M].4 版.北京:清華大學出版社,2009:439-452.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
