基于數學模型的永磁交流電動機無位置傳感器矢量控制技術
2015-01-13 01:54:26張東寧王思遠
微特電機 2015年12期
關鍵詞:方法
張東寧,王思遠
(中國電子科技集團公司第二十一研究所,上海200233)
0 引 言
永磁交流電動機的矢量控制技術采用正弦波調制方式將三相電動機的各相電流控制為正弦波形狀。該技術應用產品具有體積小、重量輕、效率高、出力大等特點,現已在交流伺服系統的驅動控制、電動汽車的驅動控制等各個領域得到了廣泛的應用。
通常,永磁交流電動機的矢量控制需要建立在基于轉子位置的旋轉坐標系上。轉子的位置信息一般需要通過位置傳感器來獲得。電動機的位置傳感器一般以旋轉變壓器、光學編碼器、磁性編碼器等為代表,其分辨率可以從每轉脈沖數128 到220以上。傳感器的環境適應性一般遠低于電動機本體的環境適應性。在高溫、高壓、沖擊振動以及惡劣電磁環境下,傳感器使用環境受到制約,限制了電動機的應用。因此,研究不需要位置傳感器的永磁電動機控制技術就成了重要的課題。
永磁交流電動機的無位置傳感器控制技術主要分為方波驅動的無位置傳感器控制技術和正弦波驅動(矢量控制)的無位置傳感器控制技術。
方波驅動的無位置傳感器控制技術利用三相電動機方波驅動時非導通相反電動勢過零檢測來估計電動機的位置,技術簡單可靠,基本能滿足中小型電動機的需求,相關產品已經應用在工業和國防等各個領域。但是,由于方波驅動在換相時電磁噪聲大、驅動效率低,因此在大功率永磁電動機驅動控制中難以實用化。因此,迫切需要針對中、大功率用途的永磁交流電動機無位置傳感器矢量控制技術。
1 永磁交流電動機的數學模型
永磁交流電動機的數學模型一般采用以電動機的速度和位置作為參數的狀態方程式來描述。在利用數學模型對電動機進行控制時,一般將電動機的電流、電壓(或電壓指令)引入數學模型中進行計算,當數學模型的輸出電流與電動機的實測電流一致時,認為數學模型內部的電動機速度以及位置也是正確值,以此得到電動機的速度或位置信息[1-12]。
采用數學模型的無位置傳感器控制技術一般建立在以下3 種坐標系上,以圖1 為參考進行說明。
1)旋轉坐標(d,q)系:以電動機的轉子N 極作為d 軸,以與d 軸相垂直(90°電角度)的軸作為q 軸的坐標系。
2)固定坐標(α,β)系:以電動機的U 相繞組的矢量方向作為α 軸,以與α 軸垂直的軸作為β 軸的坐標軸。
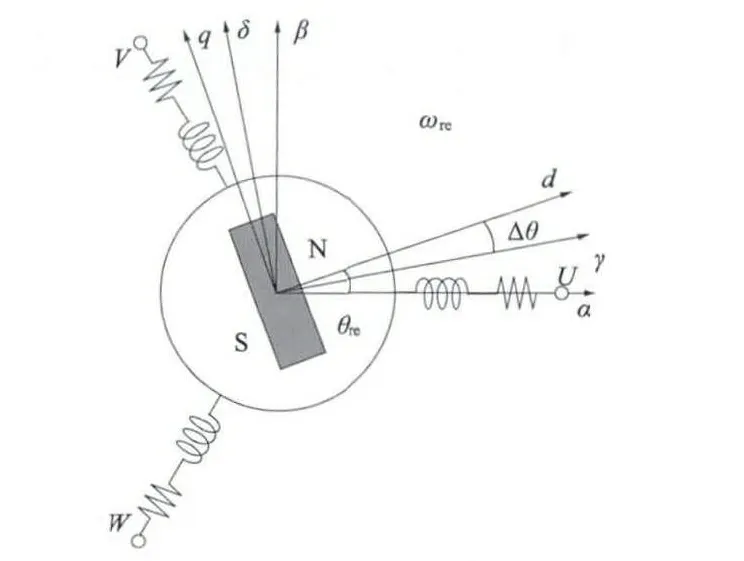
圖1 永磁交流電動機的坐標系
3)推算旋轉坐標(γ,δ)系:與旋轉d,q 坐標系的角度誤差為Δθ 的新坐標系,一般采用估算出的電機轉子位置的N 極作為γ 軸,以與γ 軸垂直的軸作為δ 軸。在無位置傳感器控制技術中,由于無法知道轉子的精確位置,因此,許多數學運算均在γ,δ坐標上完成。
永磁交流電動機的數學模型可以分別用d,q 坐標系、α,β 坐標系和γ,δ 坐標系描述。
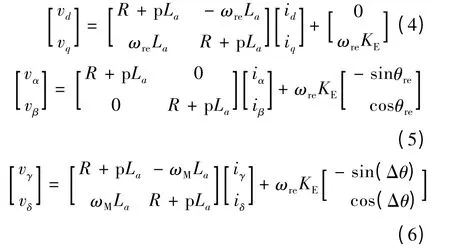
d,q 坐標系上的電動機數學模型:


α,β 坐標系上的電動機模型:


γ,δ 坐標系上的電動機模型:
為γ,δ 坐標系的速度。
如果電動機的轉子結構沒有凸極結構,即Ld=Lq(=La),則以上式(1)~式(3)可以分別簡化:
2 基于電動機數學模型的無位置傳感器控制方式
無位置傳感器控制的關鍵是設法得到電動機的速度和位置信息。在基于電動機數學模型的無位置傳感器控制技術中,速度和位置的獲得可以分類如下:
1)采用自適應觀測器檢測速度和位置的方法[2-4,12];
2)采用廣義外部干擾觀測器檢測速度和位置的方法[5-6,9];
3)用電流推算誤差的估算電動機速度和位置的方法[11]。
下面,分別介紹各種位置估算方法。
2. 1 采用自適應觀測器檢測速度和位置的方法[2-4,12]
文獻[2-4,12]分別利用自適應觀測器實現了永磁交流電動機的無位置傳感器控制。文獻[2]與文獻[3]主要針對沒有凸極結構的磁鋼表貼式永磁交流電動機;文獻[4]和文獻[12]的方法可以應用在具有凸極結構的磁鋼內嵌式永磁電動機中。
在文獻[2]的方法中,首先建立式(5)的α,β 坐標系電動機模型,其次將電動機的磁鏈變量λ 定義:

由此,式(5)可以改寫:

如圖2 所示,建立以電動機電流矢量i 和磁鏈λ為狀態變量的自適應狀態觀測器。觀測器中設置了反饋增益G,并且包含速度辨識結構。其位置的辨識不是從速度積分得到的,而是從磁鏈λ 計算得出。本方法由于不需要反電動勢常數,所以所計算的電動機位置不受反電動勢參數變化的影響。但是,由于觀測器的增益需要根據估算速度進行調整,所以在高速旋轉時,本方法容易產生不穩定現象[3-4]。
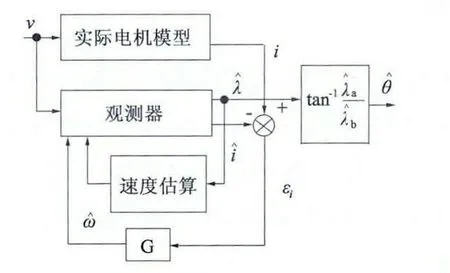
圖2 采用自適應觀測器估算電機的位置的方法
在文獻[3]的方法中,將文獻[2]的方法進行了繼承和改進,特別是將高速時的問題進行了改良:把磁鏈觀測器拓展為PLL 形式;把觀測器的增益采用頻率的概念進行了重新設計;而且,速度估算的方法采用了磁鏈位置差分進行計算。
在文獻[4]中,采用α,β 坐標系模型實現了等效自適應觀測器。此方法對文獻[2]的方法進行了以下改良:在速度辨識中考慮了觀測器的增益設計問題;可以應用在IPM(磁鋼內嵌式永磁交流電動機)電動機等具有凸極結構電動機上。
上述兩種改良后的方法對控制性能都起到了一定的提升作用。
文獻[12]給出了一個新的低次自適應狀態觀測器的方法。新的設計方法保障了觀測器的穩定性,在低速及高速領域都得到了很好的結果。
2.2 采用廣義外部干擾觀測器檢測速度和位置的方法[5-6,9]
文獻[5]的方法是:首先將數學模型式(1)變形后,引入一個新變量廣義反電動勢Eex。其次,提出一個采用外部干擾觀測器計算廣義反電動勢Eex的方法。最后,給出了從廣義反電動勢Eex計算電動機位置和速度的辨識方法。
首先,將d,q 坐標系中的廣義反電動勢Eex由式(1)定義:

在這里,廣義反電動勢Eex定義:

在進行了上述處理后,凸極型電動機的數學模型就顯得比較簡單。而且,只要設Ld=Lq就可以適用于非凸極結構的電動機;也可以設KE=0,以對應同步磁阻電動機。
將式(8)變換到α,β 坐標系,可得:
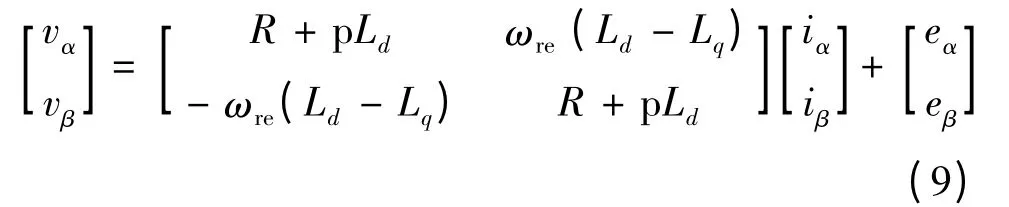
在此:
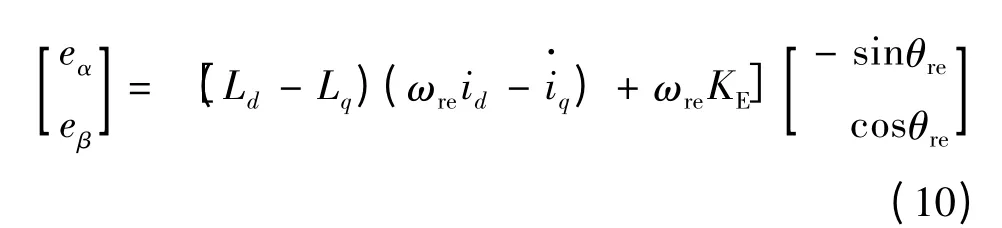
由于電動機的位置θre只包含在式(9)第2 項中,所以只要得到廣義反電動勢Eex,就可以推算出電動機的位置。文獻[5]提出了采用外部干擾觀測器計算廣義反電動勢的方法。圖3 為計算廣義反電動勢的方框圖。
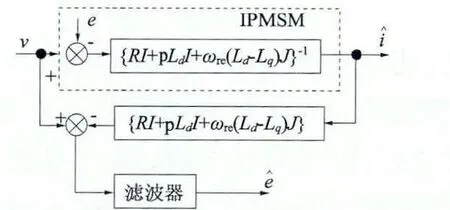
圖3 計算廣義反電動勢的外部干擾觀測器結構
在文獻[6]中,同樣采用了在d,q 坐標系上實現廣義反電動勢辨識的方法。這個方法中,首先在γ,δ 坐標上定義廣義反電動勢矢量[eγeδ]。即:

式(11)中,
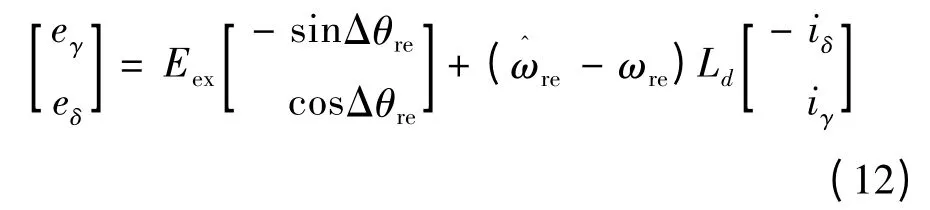
在這里定義的廣義反電動勢中包含了γ,δ 坐標系與d,q 坐標系得角度誤差Δθre。所以,只要得到角度誤差Δθre,就可以得到電動機的真實位置θre。
為了得到廣義反電動勢,構成了如圖4 所示的外部干擾觀測器(圖4 中僅標出eγ的計算方法,eδ的計算框圖可以同樣得到)。位置和速度的辨識方法都是以比例加積分結構構成的辨識算法。
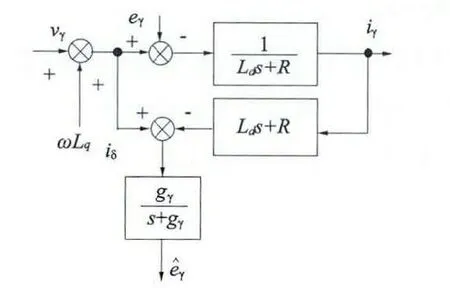
圖4 計算廣義反電動勢的外部干擾觀測器結構
2.3 基于電流推算誤差的方式[11]
基于電流推算誤差的無位置傳感器驅動方式,利用γ,δ 坐標系來實現。
在此方式中,先將實際電壓值作為輸入量輸入給電動機的模型,得到模型的輸出電流。之后,將從模型中得到的電流與電動機的實際測量電流相比較,并調整電動機模型中的速度估算值和位置估算值。當電流推算誤差為零時,認為模型中的速度以及位置與實際相符,電動機的模型得到了正確的辨識。圖5 為其方框圖。其中,ωM為推算速度,e 為反電動勢。
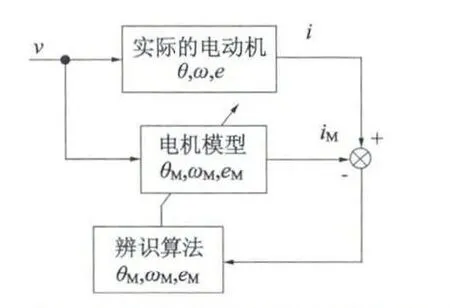
圖5 基于電流推算誤差的無位置傳感器電動機參數辨識方框圖
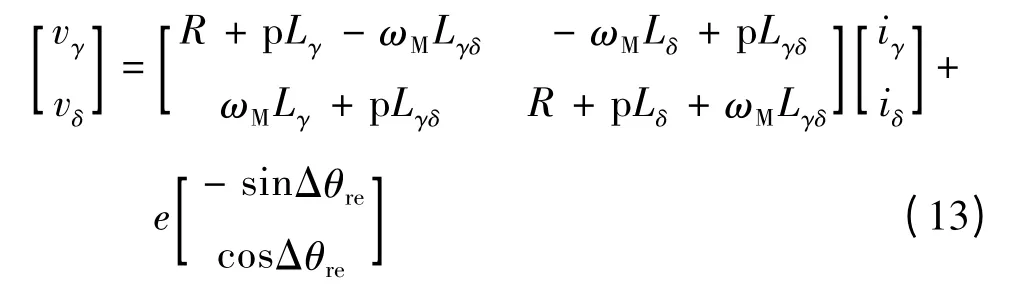
首先,建立基于電動機估算位置的d,q 坐標模型,將推算旋轉γ,δ 坐標系與旋轉d,q 坐標系的相位差設為Δθre,則得到γ,δ 坐標的電動機模型:
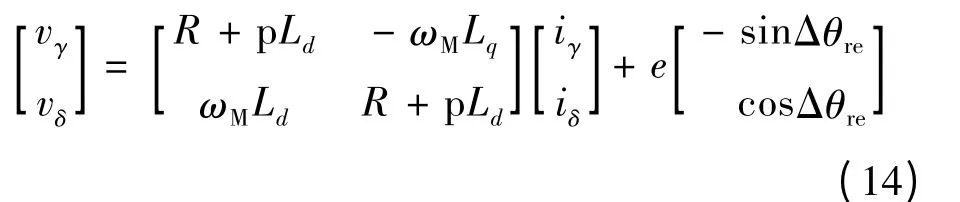
設式(13)中的Δθ 約等于零,則可以近似得到:
將式(14)用采樣時間Ts進行離散化處理,就可以得到以下的近似計算式:
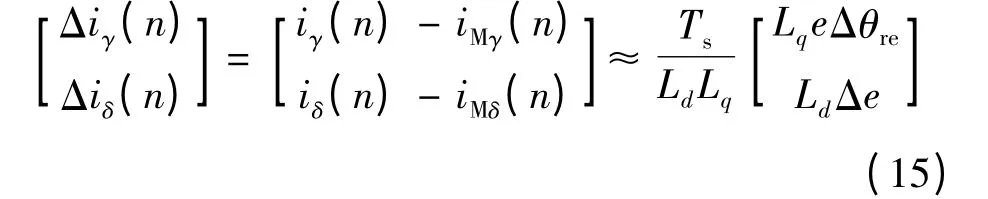
式中:Δe=e-eM。
從式(15)可以得知,γ 軸的電流誤差與位置推算誤差成正比,而δ 軸的電流推算誤差與速度推算誤差成正比,因此,可以利用上述公式,構成位置和速度的辨識算法,得到準確的速度和位置辨識結果。
3 結 語
本文對基于永磁電動機數學模型的無位置傳感器矢量控制方法進行了綜合論述。今后將結合型譜項目等相關研究工作,選擇合理的控制方式并開發新的實用算法,應用到工業以及國防等各領域中。
[1] リラクタンストルク応用電動機と制御システム[R]. 電気學會技術報告,No.719,1999.
[2] 楊耕.適応オブザーバによるブラシレスDCモータの位置センサレス制御[J].電學論D,1993,113(5):579-586.
[3] 山本.同一次元磁束オブザーバによるPMモータのセンサレス制御[C]//平成14 年電気學會産業応用部門大會,2002:673-678.
[4] 金原.回転座標上の適応オブザーバを用いたPM 電動機の位置センサレス制御[C]//平成14 年電気學會産業応用部門大會,2002:679-684.
[5] CHEN Zhiqian,TOMITA M.An extended electromotive force model for sensorless control of interior permanent-magnet synchronous motors[J].IEEE Trans.on IE,2003,50(2):288-295.
[6] MORIMOTO S,KAWAMOTOET K. Sensorless control strategy for salient-pole PMSM based on extended EMF in rotating reference frame[J].IEEE Trans.on IA,2002,38(4):1054-1061.
[7] 新中.永久磁石同期モータの最小次元D 因子狀態オブザーバとこれを用いたセンセレスベクトル制御法の提案[J].電學論D,2003,123(12):1446-1450.
[8] SHINNAKA S J. New mirror phase vector control for sensorless drive of IPM synchronous motor[C]//Proc.of IEEE International Electric Machines and Drive Conference,2003.
[9] 巖路.センサレスドライブ応用事例[C]//第22 次モータ技術フォーラム第6 回センサレスドライブ,2003.
[10] 荻原.PMモータのセンサレス制御[C]//半導體電力変換研究會,SPC-00-66,2000.
[11] 武田洋次.埋込磁石同期モータの設計と制御[M]. オウム社,2001.
[12] 新中,鳥羽,張東寧.永久磁石同期電動機の制御[C]//電気學會産業応用部門大會,2005.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
